当前位置:网站首页>GPS du début à l'abandon (XIII), surveillance autonome de l'intégrité du récepteur (raim)
GPS du début à l'abandon (XIII), surveillance autonome de l'intégrité du récepteur (raim)
2022-07-06 21:56:00 【Vent de chasse】
Surveillance autonome de l'intégrité du récepteur(RAIM: Receiver Autonomous Integrity Monitoring)Est basé sur le récepteur utilisateurRedondanceLes observations surveillent l'intégrité des résultats de positionnement de l'utilisateur,L'objectif est de détecter un satellite défectueux pendant la navigation,Et assurer la précision de navigation et de positionnement.
Pour permettre la surveillance autonome de l'intégrité du récepteur,Il doit y avoir des mesures visuelles redondantes.En général,Nombre de satellites visibles requis5L'essai d'intégrité ne peut être effectué qu'avec plus d'un;J'en ai besoin.6Plus d'un satellite défectueux peut être identifié.RAIM La version améliorée de RAIM-FDE(FDE: Fault Detection Exclusion),C'est - à - dire la technologie de détection et de dépannage des défaillances,Parce que le satellite défectueux doit être réparé,Il faut donc utiliser un minimum de6Un satellite visible.RAIM L'algorithme est très important pour les applications avec des exigences strictes de sécurité,Comme l'aviation civile、L'aviation et tout ça.
RAIM Il existe différents algorithmes d'implémentation:Méthode de détermination des résidus de pseudo - distance、Méthode de comparaison pseudo - distance、Méthode du vecteur de contrôle et méthode de séparation de la solution maximale.
Un.、Méthode de détermination des résidus de pseudo - distance
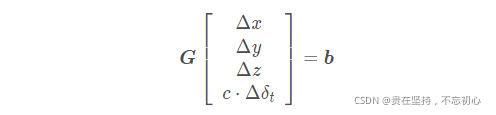
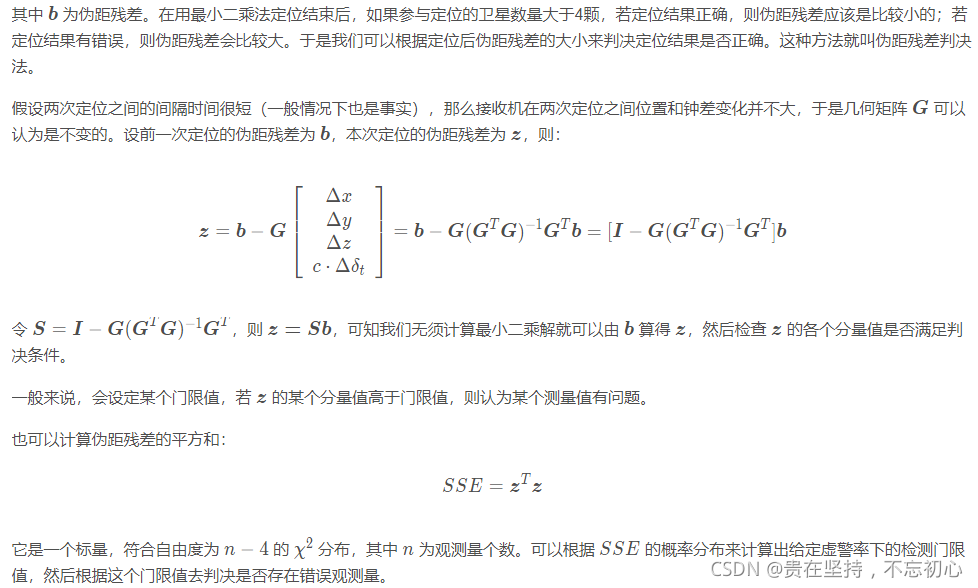
Dans la solution de l'équation de localisation, nous avons discuté du système d'équation de localisation
2.、Méthode de comparaison pseudo - distance
La méthode de comparaison pseudo - distance utilise directement la pseudo - distance pour déterminer .Les étapes sont les suivantes:
- Lorsque le nombre d'observations est supérieur à 4Dans le cas de,C'est exact.n Les mesures individuelles sont groupées ,Un groupe pour4- Oui.,L'autre groupe estn − 4 - Oui..
- C'est exact.4 L'ensemble des éléments est résolu par la méthode des moindres carrés pour déterminer la position du récepteur .
- C'est exact. n − 4 L'ensemble qui compte la position du satellite .
- Estimation de la pseudo - distance à partir de la position du récepteur calculée et de la position du satellite .
- Comparer les pseudo - distances estimées aux pseudo - distances observées . Si la comparaison se rapproche , Description les observations sont correctes ,No2 La position de la solution à mi - chemin n'est pas un problème . Sinon, il y a un problème .
- Traiter les situations problématiques .Ça dépend.. Si une seule comparaison donne des résultats très différents , Il y a une grande probabilité que cette observation soit problématique ; Si beaucoup de comparaisons sont très différentes , La grande probabilité est que la solution la moins carrée a un problème .Si nécessaire,Peut être regroupé, Recalculer le jugement comparatif .
Trois、 Méthode du vecteur de contrôle

Quatre、 Méthode de dissociation maximale

边栏推荐
- SQL:存储过程和触发器~笔记
- Huawei has launched attacks in many industries at the same time, and its frightening technology has made European and American enterprises tremble
- Happy sound 2[sing.2]
- Uni app app half screen continuous code scanning
- 设置状态栏样式Demo
- guava: Multiset的使用
- First batch selected! Tencent security tianyufeng control has obtained the business security capability certification of the ICT Institute
- Fzu 1686 dragon mystery repeated coverage
- The underlying implementation of string
- What about the spectrogram
猜你喜欢

Write a rotation verification code annotation gadget with aardio

Reptile practice (V): climbing watercress top250
![关于char[]数组通过scanf赋值使用上的一些问题。。](/img/cf/d85a3172c5d29ac00377f9c30dbc4f.png)
关于char[]数组通过scanf赋值使用上的一些问题。。
Why is the cluster mode of spark on Yan better than the client mode
Yyds dry goods inventory C language recursive implementation of Hanoi Tower
guava:Collections.unmodifiableXXX创建的collection并不immutable
AI 企业多云存储架构实践 | 深势科技分享

袁小林:安全不只是标准,更是沃尔沃不变的信仰和追求

Checkpoint of RDD in spark
Yuan Xiaolin: safety is not only a standard, but also Volvo's unchanging belief and pursuit
随机推荐
华为在多个行业同时出击,吓人的技术让欧美企业瑟瑟发抖
Leetcode topic [array] -118 Yang Hui triangle
Aggregate function with key in spark
Leetcode learning records (starting from the novice village, you can't kill out of the novice Village) ---1
Michael smashed the minority milk sign
Hill | insert sort
guava:Collections. The collection created by unmodifiablexxx is not immutable
[asp.net core] set the format of Web API response data -- formatfilter feature
The underlying implementation of string
红杉中国,刚刚募资90亿美元
It's not my boast. You haven't used this fairy idea plug-in!
First batch selected! Tencent security tianyufeng control has obtained the business security capability certification of the ICT Institute
爬虫实战(五):爬豆瓣top250
Z function (extended KMP)
C language char, wchar_ t, char16_ t, char32_ Relationship between T and character set
Fzu 1686 dragon mystery repeated coverage
MariaDb数据库管理系统的学习(一)安装示意图
Write a rotation verification code annotation gadget with aardio
PostgreSQL install GIS plug-in create extension PostGIS_ topology
保存和检索字符串