当前位置:网站首页>学习笔记6--卫星定位技术(上)
学习笔记6--卫星定位技术(上)
2022-07-05 09:43:00 【FUXI_Willard】
本系列博客包括6个专栏,分别为:《自动驾驶技术概览》、《自动驾驶汽车平台技术基础》、《自动驾驶汽车定位技术》、《自动驾驶汽车环境感知》、《自动驾驶汽车决策与控制》、《自动驾驶系统设计及应用》。
此专栏是关于《自动驾驶汽车定位技术》书籍的笔记.
1.卫星定位技术
1.1 卫星导航定位系统简介
1.1.1 全球4大导航卫星系统
美国的全球定位系统(Global Positioning System,GPS)、俄罗斯的格洛纳斯卫星导航系统(Global Navigation Satellite System,GLONASS)、中国的北斗卫星导航系统(Beidou Navigation Satellite System,BDS)、欧盟的伽利略卫星导航系统(Galileo Satellite Navigation System,GALILEO);
GPS
GPS由3部分构成,即空间卫星部分、地面监控部分和用户接收部分;
- 空间卫星部分(空间段):由21颗GPS工作卫星和3颗在轨备用卫星构成完整的21+3形式的GPS卫星工作星座;这种构型满足在地球上任意地点、任意时刻均能观测到至少4颗几何关系较好的卫星用于定位;
- 地面控制部分(地面段):由分布在全球的一个主控站、3个注入站和若干个监测站组成;
- 用户接收部分(用户段):主要接收导航、定位和授时服务,这些服务广泛应用于各个领域;
GLONASS
GLONASS由空间段、地面段、用户段组成;
- 空间段:由24颗卫星组成,其中21颗为正常工作卫星,3颗备份卫星;如果GLONASS星座完整,则可以满足在地球上任意地点、任意时刻都能收到来自至少4颗卫星的信号,从而获取可靠的导航定位信息;
- 地面段:包括系统控制中心的跟踪控制站网,这些跟踪控制站网分散在俄罗斯领土上;
- 用户段:接收卫星导航信号,从而获取需要的位置、速度、时间信息;
BDS
北斗系统由空间段、地面段、用户段组成;
- 空间段:由5颗地球静止轨道(Geostationary Orbit,GEO)卫星和30颗非地球静止轨道(Nongeostationary Orbit,NON-GEO)卫星组成;北斗二号区域导航系统采用由5颗GEO卫星、3颗倾斜地球同步轨道(Inclined Geosynchronous Orbit,IGSO)卫星和4颗中地球轨道(Medium Earth Orbit,MEO)导航卫星组成的星座方案;北斗三号导航系统由5颗GEO卫星和30颗NON-GEO卫星组成全部35颗卫星;
- GEO+MEO+IGSO星座构型是北斗卫星导航系统的完整布局,保证了在地球上任意地点、任意时刻均能接收来自4颗及以上导航卫星发射的信号,观测条件良好的地区甚至可以接收10余颗卫星的信号;
- 地面段:包括监测站、上行注入站、主控站;
GALILEO
GALILEO分为空间段、地面段、用户段;
- 空间段:由分布在3个轨道上的30颗MEO卫星构成,其中27颗工作卫星、3颗备份卫星;
- 地面段:由2个地面操控站,29个伽利略传感器站及5个S波段上行站和10个C波段上行站组成,传感器站及上行站均分布于全球;
- 用户段:提供独立于其他卫星导航系统的5种基本服务;
1.1.2 区域卫星导航系统
- 日本的准天顶卫星系统(Quasi-Zenith Satellite System,QZSS);
- 印度的区域导航卫星系统(Indian Regional Navigation Satellite System,IRNSS);
1.1.3 星基增强系统
星基增强系统(Satellite-Based Augmentation System,SBAS)由美国实施选择可用性(Selective Availability,SA)政策发展起来;SBAS主要由空间段、地面段、用户段构成;典型的增强系统:
- 美国的WAAS(Wide Area Augmentation System);
- 俄罗斯的SDCM(System for Differential Corrections and Monitoring);
- 日本的MSAS(Multi-functional Satellite Augementation System);
- 欧洲的EGNOS(European Geostationary Navigation Overlay Service);
- 印度的GAGAN(GPS Aided Geo Augmented Navigation);
1.1.4 地基增强系统
地基增强系统(Ground-Based Augmentation Systems,GBAS)综合使用各种不同效果的导航增强技术,主要包括:精度增强技术、完好性增强技术、连续性和可用性增强技术,实现增强卫星导航服务性能的功能;
北斗地基增强系统由框架网基准站和加强密度网基准站、通信网络、数据处理系统、运营平台、数据播发系统和用户终端组成,具备在全国范围内为用户提供广域实时米级、分米级、厘米级及后处理毫米级定位精度的能力,具有作用范围广、精度高、野外单机作业等优点;
1.2 GNSS定位原理
要实现GNSS定位,需要解决两个问题:一是观测瞬间卫星的空间位置;二是观测站点和卫星之间的距离,即卫星在某坐标系中的坐标;
1.2.1 坐标系统与时间系统
- 卫星导航系统中,坐标系用于描述与研究卫星在其轨道上的运动、表达地面观测站的位置及处理定位观测数据;
- 坐标系统大概分为:地理坐标系、惯性坐标系、地球坐标系、地心坐标系、参心坐标系;
- 国内常用坐标系:1954年北京54坐标系(Beijing 54 Coordinate System,P54)、1980年国家大地坐标系(National Geodetic Coordinate System 1980,C80)、1984年世界大地坐标系统(World Geodetic System-1984 Coordinate System,WGS-1984)、2000年国家大地坐标系(China Geodetic Coordinate System 2000,CGCS2000);
- 时间系统主要包括:世界时、历书时、力学时、原子时、协调世界时、儒略日、卫星导航时间系统;
- GNSS采用一个独立的时间系统作为导航定位计算的依据,称为GNSS时间系统,简称GNSST;GNSST属于原子时系统,其秒长与原子时秒长相同;
1.2.2 定位原理
假设地面测得某点 P P P到卫星 S 1 S_1 S1的距离为 r 1 r_1 r1,从几何学可知, P P P点所在的空间可能位置集缩到一个球面上,此球面的球心为卫星 S 1 S_1 S1,半径为 r 1 r_1 r1;再假设测得 P P P点到第二颗卫星 S 2 S_2 S2的距离为 r 2 r_2 r2,同样, P P P点处于以第二颗卫星 S 2 S_2 S2为球心,半径为 r 2 r_2 r2的球面上;如果同时测得 P P P点到第三颗卫星 S 3 S_3 S3的距离为 r 3 r_3 r3,即 P P P点处于以第三颗卫星 S 3 S_3 S3为球心,半径为 r 3 r_3 r3的球面上,这样即可确定 P P P点位置,即三个球面的交汇处。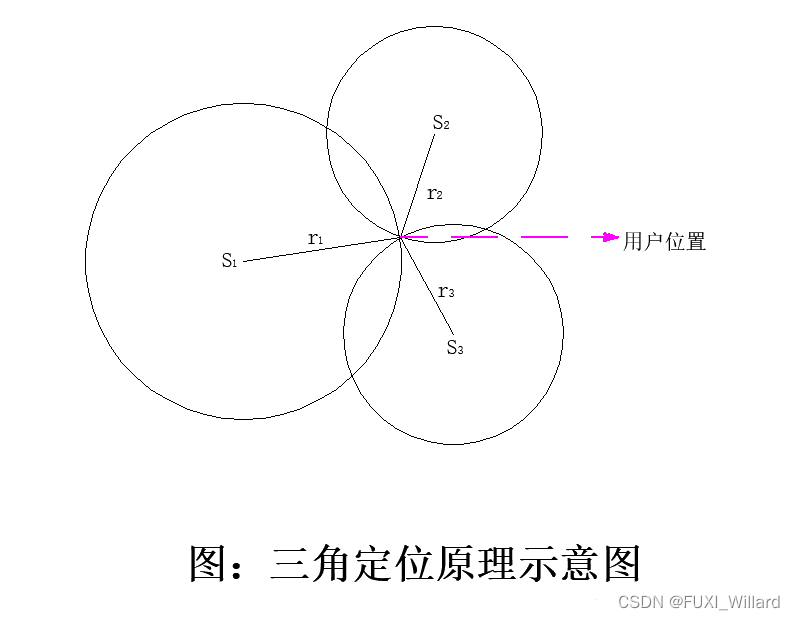
由于GNSS采用单程测距,难以保证卫星钟与用户接收机钟的严格同步,观测站和卫星之间的距离均受两种时钟不同步的影响;卫星钟差可用导航电文中所给的有关钟差参数进行修正,接收机钟差大多难以精准确定,通常采用的优化方法是将其作为一个未知参数,与观测站坐标一并求解,即一般在一个观测站上需求解4个未知参数(3个点位坐标分量和1个钟差参数),因此至少需要4个同步伪距观测值,即需要同时观测4颗卫星;
根据用户站的运动状态将GNSS分为静态定位和动态定位。
- 静态定位:将待定点固定不变,将接收机安置在待定点上进行大量的重复观测;
- 动态定位:指待定点处于运动状态,测定待定点在各观测时刻运动中的点位坐标,以及运动载体的状态参数,如:速度、时间和方位等;
根据定位模式分为绝对定位和相对定位。
- 绝对定位:只用一台接收机来进行定位,称为单点定位,所确定的是接收机天线在坐标系统中的绝对位置;
- 相对定位:指将两台接收机安置于两个固定不变的待定点上,或将一个点固定于已知点上,另一个点作为流动待定点,经过一段时间的同步观测,可以确定两个点之间的相对位置,从而获得高精度的位置坐标;
边栏推荐
- Z-blog template installation and use tutorial
- Flutter development: a way to solve the problem of blank space on the top of listview
- 基于单片机步进电机控制器设计(正转反转指示灯挡位)
- 【OpenCV 例程200篇】219. 添加数字水印(盲水印)
- 天龙八部TLBB系列 - 关于技能冷却和攻击范围数量的问题
- How to get the STW (pause) time of GC (garbage collector)?
- 程序员搞开源,读什么书最合适?
- 苹果 5G 芯片研发失败?想要摆脱高通为时过早
- How to use sqlcipher tool to decrypt encrypted database under Windows system
- Tianlong Babu TLBB series - about items dropped from packages
猜你喜欢
Baidu app's continuous integration practice based on pipeline as code

美图炒币半年亏了3个亿,华为被曝在俄罗斯扩招,AlphaGo的同类又刷爆一种棋,今日更多大新闻在此...
Solve liquibase – waiting for changelog lock Cause database deadlock

H. 265 introduction to coding principles
Swift tableview style (I) system basic
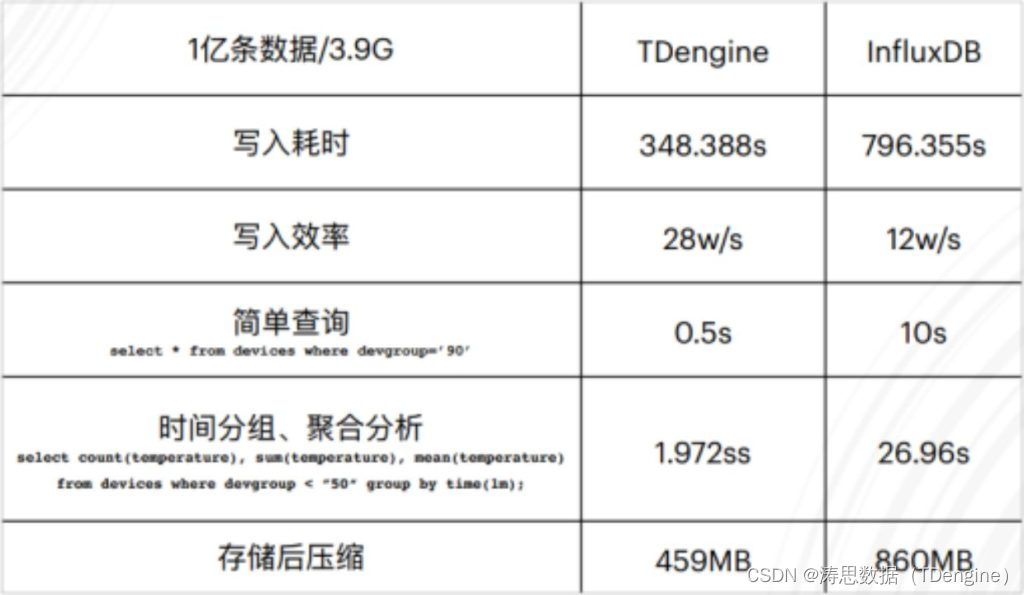
Observation cloud and tdengine have reached in-depth cooperation to optimize the cloud experience of enterprises
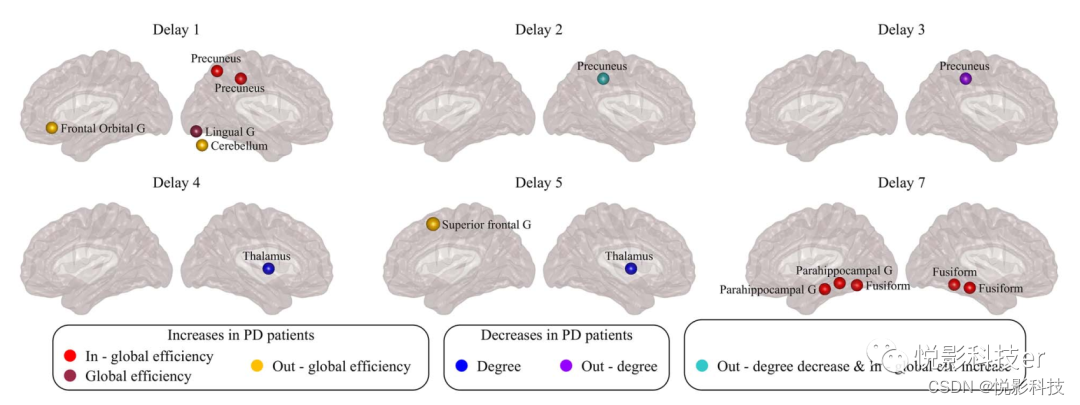
Cerebral Cortex:有向脑连接识别帕金森病中广泛存在的功能网络异常

On July 2, I invite you to TD Hero online press conference
Kotlin compose multiple item scrolling

Wechat applet - simple diet recommendation (2)
随机推荐
Implementation of smart home project
[NTIRE 2022]Residual Local Feature Network for Efficient Super-Resolution
Personal website construction tutorial | local website environment construction | website production tutorial
Observation cloud and tdengine have reached in-depth cooperation to optimize the cloud experience of enterprises
Meitu lost 300 million yuan in currency speculation for half a year. Huawei was exposed to expand its enrollment in Russia. Alphago's peers have made another breakthrough in chess. Today, more big new
Swift uses userdefaults and codable to save an array of class objects or structure instances
Comparison of batch merge between Oracle and MySQL
Advanced opencv:bgr pixel intensity map
Windows uses commands to run kotlin
Cross process communication Aidl
程序员搞开源,读什么书最合适?
面试:Bitmap像素内存分配在堆内存还是在native中
【小技巧】获取matlab中cdfplot函数的x轴,y轴的数值
Unity particle special effects series - the poison spray preform is ready, and the unitypackage package is directly used - on
《微信小程序-基础篇》小程序中的事件与冒泡
Tianlong Babu TLBB series - questions about skill cooling and the number of attack ranges
Application of data modeling based on wide table
MySQL character type learning notes
How Windows bat script automatically executes sqlcipher command
MySQL字符类型学习笔记