当前位置:网站首页>PX4 Position_ Control RC_ Remoter import
PX4 Position_ Control RC_ Remoter import
2022-07-02 11:43:00 【Xiaoqiang in chasing】
PX4 How to introduce the control quantity of the remote controller into the flight control position loop control , This article is based on PX4 1.12 edition , Compared with the previous version , Introduce more Flight Task Such a module .
Save Flow Summary
- The value of the remote control passes _flight_tasks.update() -->_velocity_setpoint adopt _flight_tasks.getPositionSetpoint() --> setpoint adopt _control.updateSetpoint(setpoint) --> vel_sp adopt PositionControl::_positionController() --> Feedforward term
- Post topics trajectory_setpoint Among them setpoint The number
Post topics vehicle_local_position_setpoint by P-PID Calculated setpoint Speed value
The main program is located in mc_pos_control_main.cpp in , After all, this is the main part of the position ring . Next to each cycle Run() function
void
MulticopterPositionControl::Run()
{
if (should_exit()) {
_local_pos_sub.unregisterCallback();
exit_and_cleanup();
return;
}
perf_begin(_cycle_perf);
if (_local_pos_sub.update(&_local_pos)) {
poll_subscriptions();
parameters_update(false);
// set _dt in controllib Block - the time difference since the last loop iteration in seconds
const hrt_abstime time_stamp_current = hrt_absolute_time();
setDt((time_stamp_current - _time_stamp_last_loop) / 1e6f);
_time_stamp_last_loop = time_stamp_current;
const bool was_in_failsafe = _in_failsafe;
_in_failsafe = false;
// activate the weathervane controller if required. If activated a flighttask can use it to implement a yaw-rate control strategy
// that turns the nose of the vehicle into the wind
if (_wv_controller != nullptr) {
// in manual mode we just want to use weathervane if position is controlled as well
// in mission, enabling wv is done in flight task
if (_control_mode.flag_control_manual_enabled) {
if (_control_mode.flag_control_position_enabled && _wv_controller->weathervane_enabled()) {
_wv_controller->activate();
} else {
_wv_controller->deactivate();
}
}
_wv_controller->update(matrix::Quatf(_att_sp.q_d), _states.yaw);
}
// an update is necessary here because otherwise the takeoff state doesn't get skiped with non-altitude-controlled modes
_takeoff.updateTakeoffState(_control_mode.flag_armed, _vehicle_land_detected.landed, false, 10.f,
!_control_mode.flag_control_climb_rate_enabled, time_stamp_current);
// takeoff delay for motors to reach idle speed
if (_takeoff.getTakeoffState() >= TakeoffState::ready_for_takeoff) {
// when vehicle is ready switch to the required flighttask
start_flight_task();
} else {
// stop flighttask while disarmed
_flight_tasks.switchTask(FlightTaskIndex::None);
}
// check if any task is active
if (_flight_tasks.isAnyTaskActive()) {
// setpoints and constraints for the position controller from flighttask or failsafe
vehicle_local_position_setpoint_s setpoint = FlightTask::empty_setpoint;
vehicle_constraints_s constraints = FlightTask::empty_constraints;
_flight_tasks.setYawHandler(_wv_controller);
// update task
if (!_flight_tasks.update()) {
// FAILSAFE
// Task was not able to update correctly. Do Failsafe.
failsafe(setpoint, _states, false, !was_in_failsafe);
} else {
setpoint = _flight_tasks.getPositionSetpoint();
constraints = _flight_tasks.getConstraints();
_failsafe_land_hysteresis.set_state_and_update(false, time_stamp_current);
// Check if position, velocity or thrust pairs are valid -> trigger failsaife if no pair is valid
if (!(PX4_ISFINITE(setpoint.x) && PX4_ISFINITE(setpoint.y)) &&
!(PX4_ISFINITE(setpoint.vx) && PX4_ISFINITE(setpoint.vy)) &&
!(PX4_ISFINITE(setpoint.thrust[0]) && PX4_ISFINITE(setpoint.thrust[1]))) {
failsafe(setpoint, _states, true, !was_in_failsafe);
}
// Check if altitude, climbrate or thrust in D-direction are valid -> trigger failsafe if none
// of these setpoints are valid
if (!PX4_ISFINITE(setpoint.z) && !PX4_ISFINITE(setpoint.vz) && !PX4_ISFINITE(setpoint.thrust[2])) {
failsafe(setpoint, _states, true, !was_in_failsafe);
}
}
// publish trajectory setpoint
_traj_sp_pub.publish(setpoint);
landing_gear_s gear = _flight_tasks.getGear();
// check if all local states are valid and map accordingly
set_vehicle_states(setpoint.vz);
// handle smooth takeoff
_takeoff.updateTakeoffState(_control_mode.flag_armed, _vehicle_land_detected.landed, constraints.want_takeoff,
constraints.speed_up, !_control_mode.flag_control_climb_rate_enabled, time_stamp_current);
constraints.speed_up = _takeoff.updateRamp(_dt, constraints.speed_up);
if (_takeoff.getTakeoffState() < TakeoffState::rampup && !PX4_ISFINITE(setpoint.thrust[2])) {
// we are not flying yet and need to avoid any corrections
reset_setpoint_to_nan(setpoint);
setpoint.thrust[0] = setpoint.thrust[1] = setpoint.thrust[2] = 0.0f;
// set yaw-sp to current yaw
// TODO: we need a clean way to disable yaw control
setpoint.yaw = _states.yaw;
setpoint.yawspeed = 0.f;
// prevent any integrator windup
_control.resetIntegralXY();
_control.resetIntegralZ();
// reactivate the task which will reset the setpoint to current state
_flight_tasks.reActivate();
}
if (_takeoff.getTakeoffState() < TakeoffState::flight && !PX4_ISFINITE(setpoint.thrust[2])) {
constraints.tilt = math::radians(_param_mpc_tiltmax_lnd.get());
}
// limit altitude only if local position is valid
if (PX4_ISFINITE(_states.position(2))) {
limit_altitude(setpoint);
}
// Update states, setpoints and constraints.
_control.updateConstraints(constraints);
_control.updateState(_states);
// update position controller setpoints
if (!_control.updateSetpoint(setpoint)) {
warn_rate_limited("Position-Control Setpoint-Update failed");
failsafe(setpoint, _states, true, !was_in_failsafe);
_control.updateSetpoint(setpoint);
constraints = FlightTask::empty_constraints;
}
// Generate desired thrust and yaw.
_control.generateThrustYawSetpoint(_dt);
// Fill local position, velocity and thrust setpoint.
// This message contains setpoints where each type of setpoint is either the input to the PositionController
// or was generated by the PositionController and therefore corresponds to the PositioControl internal states (states that were generated by P-PID).
// Example:
// If the desired setpoint is position-setpoint, _local_pos_sp will contain
// position-, velocity- and thrust-setpoint where the velocity- and thrust-setpoint were generated by the PositionControlller.
// If the desired setpoint has a velocity-setpoint only, then _local_pos_sp will contain valid velocity- and thrust-setpoint, but the position-setpoint
// will remain NAN. Given that the PositionController cannot generate a position-setpoint, this type of setpoint is always equal to the input to the
// PositionController.
vehicle_local_position_setpoint_s local_pos_sp{
};
local_pos_sp.timestamp = hrt_absolute_time();
local_pos_sp.x = setpoint.x;
local_pos_sp.y = setpoint.y;
local_pos_sp.z = setpoint.z;
local_pos_sp.yaw = _control.getYawSetpoint();
local_pos_sp.yawspeed = _control.getYawspeedSetpoint();
local_pos_sp.vx = PX4_ISFINITE(_control.getVelSp()(0)) ? _control.getVelSp()(0) : setpoint.vx;
local_pos_sp.vy = PX4_ISFINITE(_control.getVelSp()(1)) ? _control.getVelSp()(1) : setpoint.vy;
local_pos_sp.vz = PX4_ISFINITE(_control.getVelSp()(2)) ? _control.getVelSp()(2) : setpoint.vz;
_control.getThrustSetpoint().copyTo(local_pos_sp.thrust);
// Publish local position setpoint
// This message will be used by other modules (such as Landdetector) to determine
// vehicle intention.
_local_pos_sp_pub.publish(local_pos_sp);
// Inform FlightTask about the input and output of the velocity controller
// This is used to properly initialize the velocity setpoint when onpening the position loop (position unlock)
_flight_tasks.updateVelocityControllerIO(_control.getVelSp(), Vector3f(local_pos_sp.thrust));
// Part of landing logic: if ground-contact/maybe landed was detected, turn off
// controller. This message does not have to be logged as part of the vehicle_local_position_setpoint topic.
// Note: only adust thrust output if there was not thrust-setpoint demand in D-direction.
if (_takeoff.getTakeoffState() > TakeoffState::rampup && !PX4_ISFINITE(setpoint.thrust[2])) {
limit_thrust_during_landing(local_pos_sp);
}
// Fill attitude setpoint. Attitude is computed from yaw and thrust setpoint.
_att_sp = ControlMath::thrustToAttitude(matrix::Vector3f(local_pos_sp.thrust), local_pos_sp.yaw);
_att_sp.yaw_sp_move_rate = _control.getYawspeedSetpoint();
_att_sp.fw_control_yaw = false;
_att_sp.apply_flaps = false;
// publish attitude setpoint
// Note: this requires review. The reason for not sending
// an attitude setpoint is because for non-flighttask modes
// the attitude septoint should come from another source, otherwise
// they might conflict with each other such as in offboard attitude control.
publish_attitude();
// if there's any change in landing gear setpoint publish it
if (gear.landing_gear != _old_landing_gear_position
&& gear.landing_gear != landing_gear_s::GEAR_KEEP) {
_landing_gear.landing_gear = gear.landing_gear;
_landing_gear.timestamp = hrt_absolute_time();
_landing_gear_pub.publish(_landing_gear);
}
_old_landing_gear_position = gear.landing_gear;
} else {
// no flighttask is active: set attitude setpoint to idle
_att_sp.roll_body = _att_sp.pitch_body = 0.0f;
_att_sp.yaw_body = _states.yaw;
_att_sp.yaw_sp_move_rate = 0.0f;
_att_sp.fw_control_yaw = false;
_att_sp.apply_flaps = false;
matrix::Quatf q_sp = matrix::Eulerf(_att_sp.roll_body, _att_sp.pitch_body, _att_sp.yaw_body);
q_sp.copyTo(_att_sp.q_d);
_att_sp.q_d_valid = true;
_att_sp.thrust_body[2] = 0.0f;
// reset the numerical derivatives to not generate d term spikes when coming from non-position controlled operation
_vel_x_deriv.reset();
_vel_y_deriv.reset();
_vel_z_deriv.reset();
}
}
perf_end(_cycle_perf);
}
stay Position In the pattern , The program will be in it _flight_tasks.update() Jump to Corresponding sub mode This part is new
The program jumps to FlightTask.cpp Medium bool FlightTasks::update()
bool FlightTasks::update()
{
_updateCommand();
if (isAnyTaskActive()) {
return _current_task.task->updateInitialize() && _current_task.task->update() && _current_task.task->updateFinalize();
}
return false;
}
Then it will enter the update function in the sub mode , Like the following
bool FlightTaskManualAltitude::updateInitialize()
{
bool ret = FlightTaskManual::updateInitialize();
_sub_home_position.update();
// in addition to manual require valid position and velocity in D-direction and valid yaw
return ret && PX4_ISFINITE(_position(2)) && PX4_ISFINITE(_velocity(2)) && PX4_ISFINITE(_yaw);
}
Continue to jump and you will get
bool FlightTaskManual::updateInitialize()
{
bool ret = FlightTask::updateInitialize();
_sub_manual_control_setpoint.update();
const bool sticks_available = _evaluateSticks();
if (_sticks_data_required) {
ret = ret && sticks_available;
}
return ret;
}
And the following functions .
bool FlightTaskManual::_evaluateSticks()
{
hrt_abstime rc_timeout = (_param_com_rc_loss_t.get() * 1.5f) * 1_s;
/* Sticks are rescaled linearly and exponentially to [-1,1] */
if ((_time_stamp_current - _sub_manual_control_setpoint.get().timestamp) < rc_timeout) {
/* Linear scale */
_sticks(0) = _sub_manual_control_setpoint.get().x; /* NED x, "pitch" [-1,1] */
_sticks(1) = _sub_manual_control_setpoint.get().y; /* NED y, "roll" [-1,1] */
_sticks(2) = -(_sub_manual_control_setpoint.get().z - 0.5f) * 2.f; /* NED z, "thrust" resacaled from [0,1] to [-1,1] */
_sticks(3) = _sub_manual_control_setpoint.get().r; /* "yaw" [-1,1] */
/* Exponential scale */
_sticks_expo(0) = math::expo_deadzone(_sticks(0), _param_mpc_xy_man_expo.get(), _param_mpc_hold_dz.get());
_sticks_expo(1) = math::expo_deadzone(_sticks(1), _param_mpc_xy_man_expo.get(), _param_mpc_hold_dz.get());
_sticks_expo(2) = math::expo_deadzone(_sticks(2), _param_mpc_z_man_expo.get(), _param_mpc_hold_dz.get());
_sticks_expo(3) = math::expo_deadzone(_sticks(3), _param_mpc_yaw_expo.get(), _param_mpc_hold_dz.get());
// Only switch the landing gear up if the user switched from gear down to gear up.
// If the user had the switch in the gear up position and took off ignore it
// until he toggles the switch to avoid retracting the gear immediately on takeoff.
int8_t gear_switch = _sub_manual_control_setpoint.get().gear_switch;
if (_gear_switch_old != gear_switch) {
_applyGearSwitch(gear_switch);
}
_gear_switch_old = gear_switch;
// valid stick inputs are required
const bool valid_sticks = PX4_ISFINITE(_sticks(0))
&& PX4_ISFINITE(_sticks(1))
&& PX4_ISFINITE(_sticks(2))
&& PX4_ISFINITE(_sticks(3));
return valid_sticks;
} else {
/* Timeout: set all sticks to zero */
_sticks.zero();
_sticks_expo.zero();
_gear.landing_gear = landing_gear_s::GEAR_KEEP;
return false;
}
}
As can be seen from the above function , It is to read the data of the remote control . And the corresponding following update The function contains a _scaleSticks() Then complete the transfer of data
bool FlightTaskManualAltitude::update()
{
_scaleSticks();
_updateSetpoints();
_constraints.want_takeoff = _checkTakeoff();
return true;
}
The above _scaleSticks() Expand to get
void FlightTaskManualPosition::_scaleSticks()
{
/* Use same scaling as for FlightTaskManualAltitude */
FlightTaskManualAltitude::_scaleSticks();
/* Constrain length of stick inputs to 1 for xy*/
Vector2f stick_xy(&_sticks_expo(0));
float mag = math::constrain(stick_xy.length(), 0.0f, 1.0f);
if (mag > FLT_EPSILON) {
stick_xy = stick_xy.normalized() * mag;
}
// scale the stick inputs
if (PX4_ISFINITE(_sub_vehicle_local_position.get().vxy_max)) {
// estimator provides vehicle specific max
// use the minimum of the estimator and user specified limit
_velocity_scale = fminf(_constraints.speed_xy, _sub_vehicle_local_position.get().vxy_max);
// Allow for a minimum of 0.3 m/s for repositioning
_velocity_scale = fmaxf(_velocity_scale, 0.3f);
} else if (stick_xy.length() > 0.5f) {
// raise the limit at a constant rate up to the user specified value
if (_velocity_scale < _constraints.speed_xy) {
_velocity_scale += _deltatime * _param_mpc_acc_hor_estm.get();
} else {
_velocity_scale = _constraints.speed_xy;
}
}
// scale velocity to its maximum limits
Vector2f vel_sp_xy = stick_xy * _velocity_scale;
/* Rotate setpoint into local frame. */
_rotateIntoHeadingFrame(vel_sp_xy);
// collision prevention
if (_collision_prevention.is_active()) {
_collision_prevention.modifySetpoint(vel_sp_xy, _velocity_scale, Vector2f(_position),
Vector2f(_velocity));
}
_velocity_setpoint(0) = vel_sp_xy(0);
_velocity_setpoint(1) = vel_sp_xy(1);
}
So far, let's make a summary , Equivalent to the value of the remote control in FlightTaks::update() Complete reading , And into _velocity_setpoint()
Then Then there is a function setpoint = _flight_tasks.getPositionSetpoint(); We expand it to
const vehicle_local_position_setpoint_s FlightTask::getPositionSetpoint()
{
/* fill position setpoint message */
vehicle_local_position_setpoint_s vehicle_local_position_setpoint;
vehicle_local_position_setpoint.timestamp = hrt_absolute_time();
vehicle_local_position_setpoint.x = _position_setpoint(0);
vehicle_local_position_setpoint.y = _position_setpoint(1);
vehicle_local_position_setpoint.z = _position_setpoint(2);
vehicle_local_position_setpoint.vx = _velocity_setpoint(0);
vehicle_local_position_setpoint.vy = _velocity_setpoint(1);
vehicle_local_position_setpoint.vz = _velocity_setpoint(2);
vehicle_local_position_setpoint.acc_x = _acceleration_setpoint(0);
vehicle_local_position_setpoint.acc_y = _acceleration_setpoint(1);
vehicle_local_position_setpoint.acc_z = _acceleration_setpoint(2);
vehicle_local_position_setpoint.jerk_x = _jerk_setpoint(0);
vehicle_local_position_setpoint.jerk_y = _jerk_setpoint(1);
vehicle_local_position_setpoint.jerk_z = _jerk_setpoint(2);
_thrust_setpoint.copyTo(vehicle_local_position_setpoint.thrust);
vehicle_local_position_setpoint.yaw = _yaw_setpoint;
vehicle_local_position_setpoint.yawspeed = _yawspeed_setpoint;
return vehicle_local_position_setpoint;
}
It can be seen that later _velocity_setpoint() Enter into setpoint variable
---------------------! Split line !---------------------
Subsequently passed _traj_sp_pub.publish(setpoint); take setpoint Publish in the form of topic ; The topic is trajectory_setpoint
And then We notice that there is a _control.updateSetpoint(setpoint) function , We expand it . Let's see how to get into control
bool PositionControl::updateSetpoint(const vehicle_local_position_setpoint_s &setpoint)
{
// by default we use the entire position-velocity control-loop pipeline (flag only for logging purpose)
_setCtrlFlag(true);
_pos_sp = Vector3f(setpoint.x, setpoint.y, setpoint.z);
_vel_sp = Vector3f(setpoint.vx, setpoint.vy, setpoint.vz);
_acc_sp = Vector3f(setpoint.acc_x, setpoint.acc_y, setpoint.acc_z);
_thr_sp = Vector3f(setpoint.thrust);
_yaw_sp = setpoint.yaw;
_yawspeed_sp = setpoint.yawspeed;
bool mapping_succeeded = _interfaceMapping();
// If full manual is required (thrust already generated), don't run position/velocity
// controller and just return thrust.
_skip_controller = PX4_ISFINITE(_thr_sp(0)) && PX4_ISFINITE(_thr_sp(1))
&& PX4_ISFINITE(_thr_sp(2));
return mapping_succeeded;
}
Here again setpoint Assign a value to _vel_sp.
Position loop P-PID The form is completed in the following function
_control.generateThrustYawSetpoint(_dt);
void PositionControl::generateThrustYawSetpoint(const float dt)
{
if (_skip_controller) {
// Already received a valid thrust set-point.
// Limit the thrust vector.
float thr_mag = _thr_sp.length();
if (thr_mag > _param_mpc_thr_max.get()) {
_thr_sp = _thr_sp.normalized() * _param_mpc_thr_max.get();
} else if (thr_mag < _param_mpc_manthr_min.get() && thr_mag > FLT_EPSILON) {
_thr_sp = _thr_sp.normalized() * _param_mpc_manthr_min.get();
}
// Just set the set-points equal to the current vehicle state.
_pos_sp = _pos;
_vel_sp = _vel;
_acc_sp = _acc;
} else {
_positionController();
_velocityController(dt);
}
}
We will _positionController() an
void PositionControl::_positionController()
{
// P-position controller
const Vector3f vel_sp_position = (_pos_sp - _pos).emult(Vector3f(_param_mpc_xy_p.get(), _param_mpc_xy_p.get(),
_param_mpc_z_p.get()));
_vel_sp = vel_sp_position + _vel_sp;
// Constrain horizontal velocity by prioritizing the velocity component along the
// the desired position setpoint over the feed-forward term.
const Vector2f vel_sp_xy = ControlMath::constrainXY(Vector2f(vel_sp_position),
Vector2f(_vel_sp - vel_sp_position), _param_mpc_xy_vel_max.get());
_vel_sp(0) = vel_sp_xy(0);
_vel_sp(1) = vel_sp_xy(1);
// Constrain velocity in z-direction.
_vel_sp(2) = math::constrain(_vel_sp(2), -_constraints.speed_up, _constraints.speed_down);
}
You can see _vel_sp As a feedforward term, enter Speed setting value
Then through speed control PID Figure out Thrust as well as Yaw Direction setting of
Post topics vehicle_local_position_setpoint. Where the speed is P-PID Calculated setpoint Speed value _vel_sp Variable
Finally, three-dimensional Thrust Convert to the given Attitude.
边栏推荐
猜你喜欢
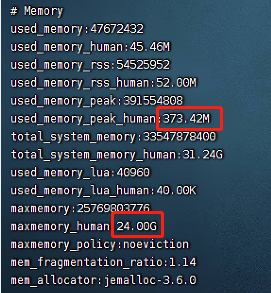
Redis exceeds the maximum memory error oom command not allowed when used memory & gt; ' maxmemory'

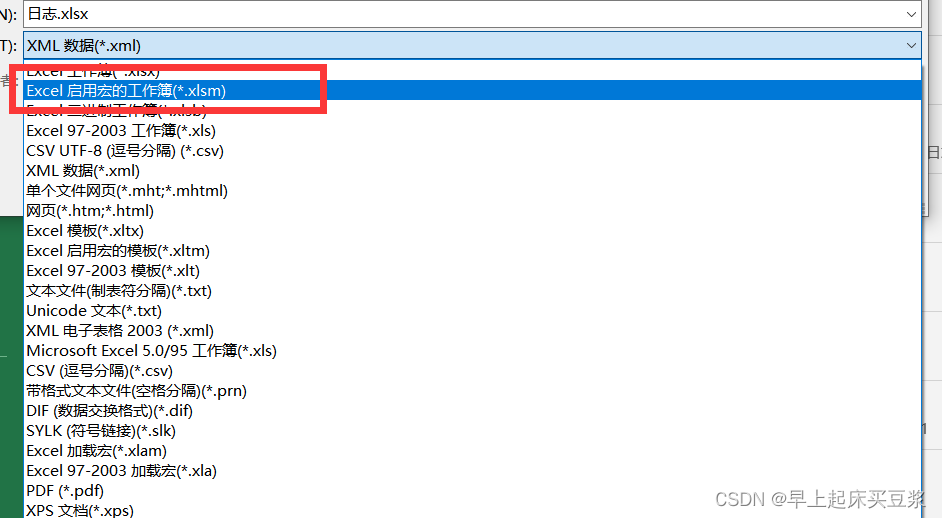
Summary of data export methods in powerbi

Principle of scalable contract delegatecall

制造业数字化转型和精益生产什么关系

Internship report skywalking distributed link tracking?
![[cloud native] 2.5 kubernetes core practice (Part 2)](/img/87/826894d758392a0c7a60dd5fa09eef.png)
[cloud native] 2.5 kubernetes core practice (Part 2)

MTK full dump抓取

TDSQL|就业难?腾讯云数据库微认证来帮你

2022年4月17日五心红娘团队收获双份喜报
excel表格中选中单元格出现十字带阴影的选中效果
随机推荐
CTF record
ros缺少catkin_pkg
bedtools使用教程
可昇級合約的原理-DelegateCall
Digital transformation takes the lead to resume production and work, and online and offline full integration rebuilds business logic
Supermarket (heap overload
VS2019代码中包含中文内容导致的编译错误和打印输出乱码问题
Skills of PLC recorder in quickly monitoring multiple PLC bits
Visualization of chip SEQ data by deeptools
抖音海外版TikTok:正与拜登政府敲定最终数据安全协议
基于Hardhat和Openzeppelin开发可升级合约(一)
Verilog 和VHDL有符号数和无符号数相关运算
Win11 arm system configuration Net core environment variable
mmrotate旋转目标检测框架使用记录
flutter 问题总结
ImportError: cannot import name ‘Digraph‘ from ‘graphviz‘
[cloud native] 2.5 kubernetes core practice (Part 2)
tqdm的多行显示与单行显示
Installation of ROS gazebo related packages
From the perspective of attack surface, see the practice of zero trust scheme of Xinchuang