当前位置:网站首页>QEMU demo makefile analysis
QEMU demo makefile analysis
2022-07-05 08:11:00 【Nanbolwan】
List of articles
[qemu Of STM32 Virtualized environment ](https://blog.csdn.net/BLUCEJIE/article/details/113482065)List of articles
Preface
Last week, we successfully built qemu Of STM32 The virtualization environment of , Today we will learn from the original author DEMO Program , Analyze the usage of virtualized environment . Lay a foundation for our next study .
One 、 Look at the demo programmatic makefile
Used to keil MDK Or this IAR Students who develop under the environment may not know makefile What is it . This is IDE The poison of the environment to developers , Although it effectively improves the development efficiency . But for learning, it hides all the compilation details .
So let's do a direct analysis makefile, I do not know! makefile Readers of the rules can Baidu first , Have a brief understanding of makefile The rules of . stay demo There is one under the directory makefile, Executing it can complete all the compilation tasks , Let's can't wait to open it and find out . For the convenience of explanation, I made comments directly on the contents of the document :
# DECLARATIONS
# Directory where QEMU_STM32 ARM executable is located - used for running
# program in emulator.
# A variable is defined to indicate that we qemu Directory of virtual machine source code
QEMU_ARM_DIR ?= ../qemu_stm32/arm-softmmu/
# OpenOCD interface file used for programming/debugging the micronctroller
OPENOCD_INTERFACE ?= interface/olimex-arm-usb-tiny-h.cfg
# Declare command line tools - assume these are in the path
# Define the compiler of the compiler 、 The connector 、 Assembler and debugger
CC = arm-none-eabi-gcc
LD = arm-none-eabi-ld
AS = arm-none-eabi-as
CP = arm-none-eabi-objcopy
OD = arm-none-eabi-objdump
# Declare command line flags
# Define compilation parameters
CORE_CFLAGS = -I./ -I$(CORE_SRC) -I$(DEVICE_SRC) -I$(STD_PERIPH)/inc -Idemos/common -fno-common -O0 -g -mcpu=cortex-m3 -mthumb
CFLAGS = $(CORE_CFLAGS) -c
CFLAGS_LINK = -Wl,-Tdemos/main.ld -nostartfiles $(CORE_CFLAGS)
ASFLAGS = -mcpu=cortex-m3 -mthumb -g
LDFLAGS = -Tdemos/main.ld -nostartfiles
CPFLAGS = -Obinary
ODFLAGS = -S
# Declare library source paths
# Define the source code path of the Library
SRC = $(realpath .)
CORE_SRC = $(SRC)/libraries/CMSIS/CM3/CoreSupport
DEVICE_SRC = $(SRC)/libraries/CMSIS/CM3/DeviceSupport/ST/STM32F10x
STD_PERIPH = $(SRC)/libraries/STM32F10x_StdPeriph_Driver
STD_PERIPH_SRC = $(STD_PERIPH)/src
# List common and system library source files
# (i.e. for accessing STM32/Cortex M3 hardware)
COMMON_FILES = $(CORE_SRC)/core_cm3.c
COMMON_FILES += $(DEVICE_SRC)/system_stm32f10x.c
COMMON_FILES += $(DEVICE_SRC)/startup/gcc_ride7/startup_stm32f10x_md.s
COMMON_FILES += demos/common/stm32_p103.c
COMMON_FILES += demos/common/myprintk.c
COMMON_FILES += $(STD_PERIPH_SRC)/stm32f10x_rcc.c
COMMON_FILES += $(STD_PERIPH_SRC)/stm32f10x_gpio.c
COMMON_FILES += $(STD_PERIPH_SRC)/stm32f10x_usart.c
COMMON_FILES += $(STD_PERIPH_SRC)/stm32f10x_exti.c
COMMON_FILES += $(STD_PERIPH_SRC)/stm32f10x_adc.c
COMMON_FILES += $(STD_PERIPH_SRC)/stm32f10x_tim.c
COMMON_FILES += $(STD_PERIPH_SRC)/stm32f10x_rtc.c
COMMON_FILES += $(STD_PERIPH_SRC)/stm32f10x_dac.c
COMMON_FILES += $(STD_PERIPH_SRC)/misc.c
# List all demos
# List so demo
DEMOS = adc_single
DEMOS += blink_flash
DEMOS += blink_flash_asm
DEMOS += button
DEMOS += button_int
DEMOS += button_int_infinite
DEMOS += c_mem_model
DEMOS += freertos_singlethread
DEMOS += freertos_multithread
DEMOS += freertos_streambuffer
DEMOS += qemu_test
DEMOS += software_int
DEMOS += stkalign
DEMOS += systick
DEMOS += timer
DEMOS += printf_demo
DEMOS += uart_echo
DEMOS += uart_echo_int
DEMOS += uart_repeat_write
DEMOS += uart_repeat_write_int
DEMOS += rtc
DEMOS += dac
DEMOS += freertos_semaphore1
DEMOS += freertos_cycletask
# List all demo folders
DEMO_FOLDERS = $(addprefix demos/,$(DEMOS))
# List FreeRTOS resources
FREE_RTOS_SRC = $(SRC)/libraries/FreeRTOS
FREE_RTOS_SRC_FILES = $(FREE_RTOS_SRC)/croutine.c $(FREE_RTOS_SRC)/list.c $(FREE_RTOS_SRC)/queue.c $(FREE_RTOS_SRC)/tasks.c $(FREE_RTOS_SRC)/croutine.c $(FREE_RTOS_SRC)/stream_buffer.c $(FREE_RTOS_SRC)/portable/GCC/ARM_CM3/port.c
FREE_RTOS_INC = $(FREE_RTOS_SRC)/include/
FREE_RTOS_PORT_INC = $(FREE_RTOS_SRC)/portable/GCC/ARM_CM3/
# List path to demo build output files
OUTPUT_FILES = $(addsuffix /main,$(DEMO_FOLDERS))
ELF_FILES = $(addsuffix .elf,$(OUTPUT_FILES))
LIST_FILES = $(addsuffix .list,$(OUTPUT_FILES))
BIN_FILES = $(addsuffix .bin,$(OUTPUT_FILES))
# Declare target names for each demo
ALL_TARGETS = $(addsuffix _ALL,$(DEMOS))
PROG_TARGETS = $(addsuffix _PROG,$(DEMOS))
QEMU_RUN_TARGETS = $(addsuffix _QEMURUN,$(DEMOS))
QEMU_RUN_PTY_TARGETS = $(addsuffix _QEMURUN_PTY,$(DEMOS))
QEMU_RUN_TEL_TARGETS = $(addsuffix _QEMURUN_TEL,$(DEMOS))
QEMU_DBG_TARGETS = $(addsuffix _QEMUDBG,$(DEMOS))
QEMU_DBG_PTY_TARGETS = $(addsuffix _QEMUDBG_PTY,$(DEMOS))
QEMU_DBG_TEL_TARGETS = $(addsuffix _QEMUDBG_TEL,$(DEMOS))
# TARGETS - See README for descriptions of the targets
# Generic targets
.PHONY: clean $(ALL_TARGETS) $(PROG_TARGETS) openocd_dbg
all: $(ALL_TARGETS)
clean:
find . -type f -name "*.o" -exec rm {
} \;
find . -type f -name "*.elf" -exec rm {
} \;
find . -type f -name "*.bin" -exec rm {
} \;
find . -type f -name "*.list" -exec rm {
} \;
# Compile targets (builds all output files)
$(ALL_TARGETS): %_ALL : demos/%/main.elf demos/%/main.bin demos/%/main.list
# Targets to program a microntroller using OpenOCD
$(PROG_TARGETS): %_PROG : %_ALL
-killall -q openocd
openocd -f $(OPENOCD_INTERFACE) -f openocd/openocd_stm32_p103.cfg -c "program_flash demos/$*/main.bin"
# Target to launch OpenOCD - by default, OpenOCD creates a GDB server at port 3333.
DBG:
-killall -q openocd
openocd -f $(OPENOCD_INTERFACE) -f openocd/openocd_stm32_p103.cfg -c "init_stm32"
# QEMU run targets
# Shows how to run a demo
$(QEMU_RUN_TARGETS): %_QEMURUN : %_ALL
-killall -q qemu-system-arm
$(QEMU_ARM_DIR)qemu-system-arm -M stm32-p103 -kernel demos/$*/main.bin
$(QEMU_RUN_PTY_TARGETS): %_QEMURUN_PTY : %_ALL
-killall -q qemu-system-arm
$(QEMU_ARM_DIR)qemu-system-arm -M stm32-p103 -kernel demos/$*/main.bin -serial pty
$(QEMU_RUN_TEL_TARGETS): %_QEMURUN_TEL : %_ALL
-killall -q qemu-system-arm
$(QEMU_ARM_DIR)qemu-system-arm -M stm32-p103 -kernel demos/$*/main.bin -serial tcp::7777,server
# QEMU debug targets
$(QEMU_DBG_TARGETS): %_QEMUDBG : %_ALL
-killall -q qemu-system-arm
$(QEMU_ARM_DIR)qemu-system-arm -M stm32-p103 -gdb tcp::3333 -S -kernel demos/$*/main.bin
$(QEMU_DBG_PTY_TARGETS): %_QEMUDBG_PTY : %_ALL
-killall -q qemu-system-arm
$(QEMU_ARM_DIR)qemu-system-arm -M stm32-p103 -gdb tcp::3333 -S -kernel demos/$*/main.bin -serial pty
$(QEMU_DBG_TEL_TARGETS): %_QEMUDBG_TEL : %_ALL
-killall -q qemu-system-arm
$(QEMU_ARM_DIR)qemu-system-arm -M stm32-p103 -gdb tcp::3333 -S -kernel demos/$*/main.bin -serial tcp::7777,server
# Note: Use this command to run QEMU in low-level debug mode:
# qemu-system-arm -cpu cortex-m3 -M stm32-p103 -nographic -singlestep -kernel main.bin -d in_asm,out_asm,exec,cpu,int,op,op_opt
# Compile targets to build individual files
$(LIST_FILES): %.list : %.elf
$(OD) $(ODFLAGS) $< > [email protected]
$(BIN_FILES): %.bin : %.elf
$(CP) $(CPFLAGS) $< [email protected]
# Targets to build individual demos
demos/blink_flash/main.elf: demos/blink_flash/main.c
demos/blink_flash/main.elf: $(STD_PERIPH_SRC)/stm32f10x_rcc.c
demos/blink_flash/main.elf: $(STD_PERIPH_SRC)/stm32f10x_gpio.c
demos/blink_flash/main.elf: $(COMMON_FILES)
$(CC) $(CFLAGS_LINK) -Idemos/blink_flash/ -o [email protected] $^
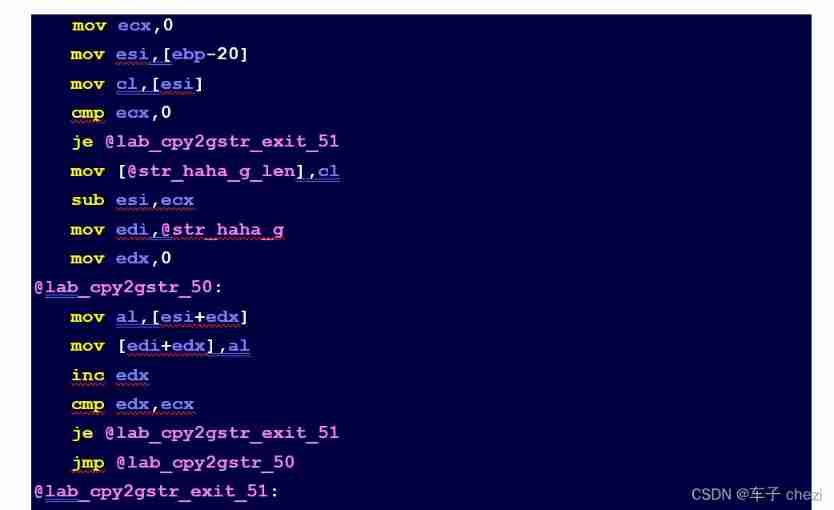
demos/blink_flash_asm/main.elf: demos/blink_flash_asm/main.o
$(LD) $(LDFLAGS) -nostartfiles -o [email protected] $<
demos/blink_flash_asm/main.o: demos/blink_flash_asm/main.s
$(AS) $(ASFLAGS) -o [email protected] $<
demos/adc_single/main.elf: demos/adc_single/main.c
demos/adc_single/main.elf: $(COMMON_FILES)
$(CC) $(CFLAGS_LINK) -Idemos/adc_single/ -o [email protected] $^
demos/button/main.elf: demos/button/main.c
demos/button/main.elf: $(COMMON_FILES)
$(CC) $(CFLAGS_LINK) -Idemos/button/ -o [email protected] $^
demos/button_int/main.elf: demos/button_int/main.c
demos/button_int/main.elf: $(COMMON_FILES)
$(CC) $(CFLAGS_LINK) -Idemos/button_int/ -o [email protected] $^
demos/button_int_infinite/main.elf: demos/button_int/main.c
demos/button_int_infinite/main.elf: $(COMMON_FILES)
$(CC) -DDO_NOT_CLEAR_IT_PENDING_FLAG $(CFLAGS_LINK) -Idemos/button_int/ -o [email protected] $^
demos/c_mem_model/main.o: demos/c_mem_model/main.c
$(CC) $(CFLAGS_LINK) -Idemos/c_mem_model/ -c -o [email protected] $^
demos/c_mem_model/main.elf: demos/c_mem_model/main.o
demos/c_mem_model/main.elf: $(COMMON_FILES)
$(CC) $(CFLAGS_LINK) -Idemos/c_mem_model/ -o [email protected] $^
demos/freertos_singlethread/main.elf: demos/freertos_singlethread/main.c
demos/freertos_singlethread/main.elf: $(COMMON_FILES)
demos/freertos_singlethread/main.elf: $(FREE_RTOS_SRC_FILES)
demos/freertos_singlethread/main.elf: $(FREE_RTOS_SRC)/portable/MemMang/heap_1.c
$(CC) $(CFLAGS_LINK) -Idemos/freertos_singlethread/ -I$(FREE_RTOS_INC) -I$(FREE_RTOS_PORT_INC) -o [email protected] $^
demos/freertos_multithread/main.elf: demos/freertos_multithread/main.c
demos/freertos_multithread/main.elf: $(COMMON_FILES)
demos/freertos_multithread/main.elf: $(FREE_RTOS_SRC_FILES)
demos/freertos_multithread/main.elf: $(FREE_RTOS_SRC)/portable/MemMang/heap_1.c
$(CC) $(CFLAGS_LINK) -Idemos/freertos_multithread/ -I$(FREE_RTOS_INC) -I$(FREE_RTOS_PORT_INC) -o [email protected] $^
demos/freertos_streambuffer/main.elf: demos/freertos_streambuffer/main.c
demos/freertos_streambuffer/main.elf: $(COMMON_FILES)
demos/freertos_streambuffer/main.elf: $(FREE_RTOS_SRC_FILES)
demos/freertos_streambuffer/main.elf: $(FREE_RTOS_SRC)/portable/MemMang/heap_1.c
$(CC) $(CFLAGS_LINK) -Idemos/freertos_streambuffer/ -I$(FREE_RTOS_INC) -I$(FREE_RTOS_PORT_INC) -o [email protected] $^
demos/qemu_test/main.elf: demos/qemu_test/main.c
demos/qemu_test/main.elf: $(COMMON_FILES)
$(CC) $(CFLAGS_LINK) -Idemos/qemu_test/ -o [email protected] $^
demos/software_int/main.elf: demos/software_int/main.c
demos/software_int/main.elf: $(COMMON_FILES)
$(CC) $(CFLAGS_LINK) -Idemos/software_int/ -o [email protected] $^
demos/stkalign/main.elf: demos/stkalign/main.c
demos/stkalign/main.elf: $(COMMON_FILES)
$(CC) $(CFLAGS_LINK) -Idemos/stkalign/ -o [email protected] $^
demos/systick/main.elf: demos/systick/main.c
demos/systick/main.elf: $(COMMON_FILES)
$(CC) $(CFLAGS_LINK) -Idemos/systick/ -o [email protected] $^
demos/timer/main.elf: demos/timer/main.c
demos/timer/main.elf: $(COMMON_FILES)
$(CC) $(CFLAGS_LINK) -Idemos/timer/ -o [email protected] $^
demos/uart_echo/main.elf: demos/uart_echo/main.c
demos/uart_echo/main.elf: $(COMMON_FILES)
$(CC) $(CFLAGS_LINK) -Idemos/uart_echo/ -o [email protected] $^
demos/printf_demo/main.elf: demos/printf_demo/main.c
demos/printf_demo/main.elf: $(COMMON_FILES)
$(CC) $(CFLAGS_LINK) -Idemos/printf_demo/ -o [email protected] $^
demos/uart_repeat_write/main.elf: demos/uart_repeat_write/main.c
demos/uart_repeat_write/main.elf: $(COMMON_FILES)
$(CC) $(CFLAGS_LINK) -Idemos/uart_repeat_write/ -o [email protected] $^
demos/uart_echo_int/main.elf: demos/uart_echo_int/main.c
demos/uart_echo_int/main.elf: $(COMMON_FILES)
$(CC) $(CFLAGS_LINK) -Idemos/uart_echo_int/ -o [email protected] $^
demos/uart_repeat_write_int/main.elf: demos/uart_repeat_write_int/main.c
demos/uart_repeat_write_int/main.elf: $(COMMON_FILES)
$(CC) $(CFLAGS_LINK) -Idemos/uart_repeat_write_int/ -o [email protected] $^
demos/dac/main.elf: demos/dac/main.c
demos/dac/main.elf: $(COMMON_FILES)
$(CC) $(CFLAGS_LINK) -Idemos/dac/ -o [email protected] $^
demos/rtc/main.elf: demos/rtc/main.c
demos/rtc/main.elf: $(COMMON_FILES)
$(CC) $(CFLAGS_LINK) -Idemos/rtc/ -o [email protected] $^
demos/freertos_semaphore1/main.elf: demos/freertos_semaphore1/main.c
demos/freertos_semaphore1/main.elf: $(COMMON_FILES)
demos/freertos_semaphore1/main.elf: $(FREE_RTOS_SRC_FILES)
demos/freertos_semaphore1/main.elf: $(FREE_RTOS_SRC)/portable/MemMang/heap_1.c
$(CC) $(CFLAGS_LINK) -Idemos/freertos_semaphore1/ -I$(FREE_RTOS_INC) -I$(FREE_RTOS_PORT_INC) -o [email protected] $^
demos/freertos_cycletask/main.elf: demos/freertos_cycletask/main.c
demos/freertos_cycletask/main.elf: $(COMMON_FILES)
demos/freertos_cycletask/main.elf: $(FREE_RTOS_SRC_FILES)
demos/freertos_cycletask/main.elf: $(FREE_RTOS_SRC)/portable/MemMang/heap_1.c
$(CC) $(CFLAGS_LINK) -Idemos/freertos_cycletask/ -I$(FREE_RTOS_INC) -I$(FREE_RTOS_PORT_INC) -o [email protected] $^
Two 、 Use steps
// compiler
make
// Run the program
make systick_QEMURUN
summary
Students who can't understand can go to mend first makefile Rules and grammar . I will introduce you to the next article VScode IDE Construction of debugging environment .
边栏推荐
- Bluetooth hc-05 pairing process and precautions
- [untitled] record the visual shock of the Winter Olympics and the introduction of the display screen
- How to define guid in AMI code
- Shape template matching based on Halcon learning [viii] PM_ multiple_ models. Hdev routine
- Working principle and type selection of common mode inductor
- Relationship between line voltage and phase voltage, line current and phase current
- Sql Server的存儲過程詳解
- FIO测试硬盘性能参数和实例详细总结(附源码)
- Classic application of MOS transistor circuit design (1) -iic bidirectional level shift
- C language # and #
猜你喜欢

生产中影响滑环质量的因素
How to copy formatted notepad++ text?

Design a clock frequency division circuit that can be switched arbitrarily
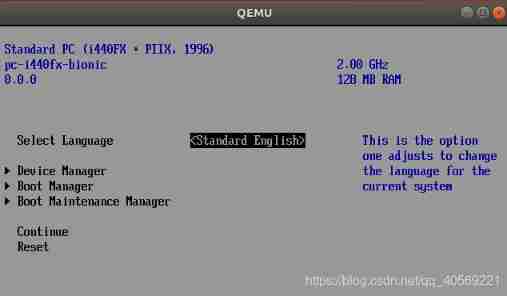
UEFI development learning 2 - running ovmf in QEMU
![C WinForm [get file path -- traverse folder pictures] - practical exercise 6](/img/8b/1e470de4e4ecd4fd1bb8e5cf23f466.jpg)
C WinForm [get file path -- traverse folder pictures] - practical exercise 6
Semiconductor devices (III) FET
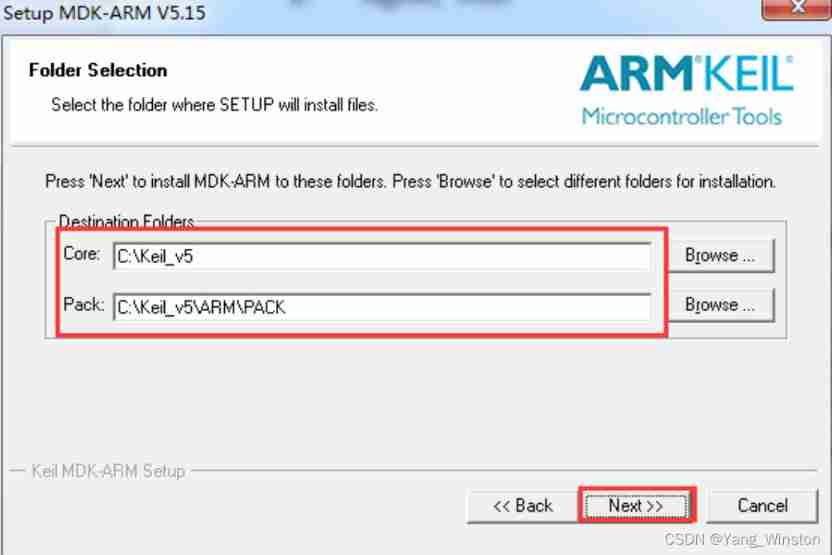
1-stm32 operation environment construction
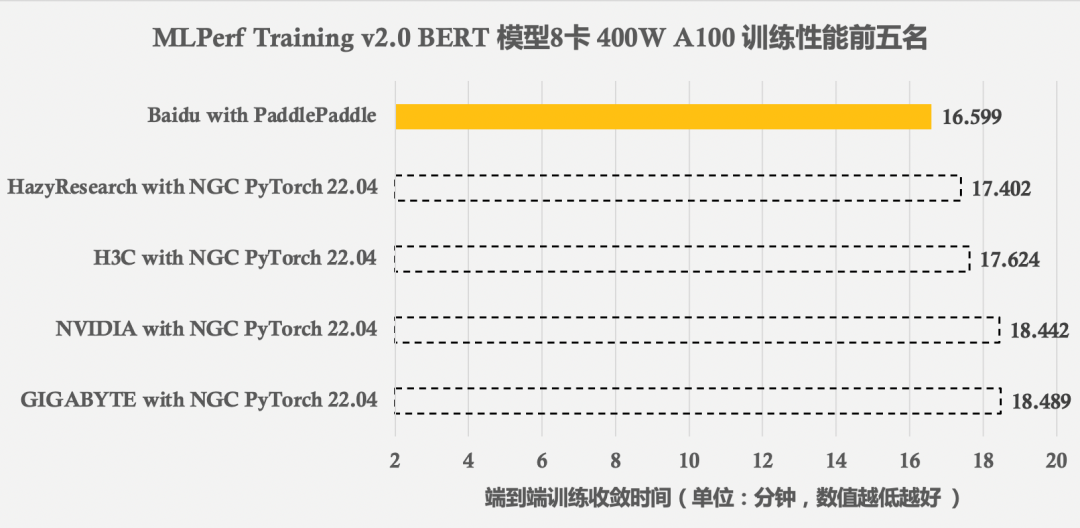
Mlperf training v2.0 list released, with the same GPU configuration, the performance of Baidu PaddlePaddle ranks first in the world

导电滑环磨损快的原因
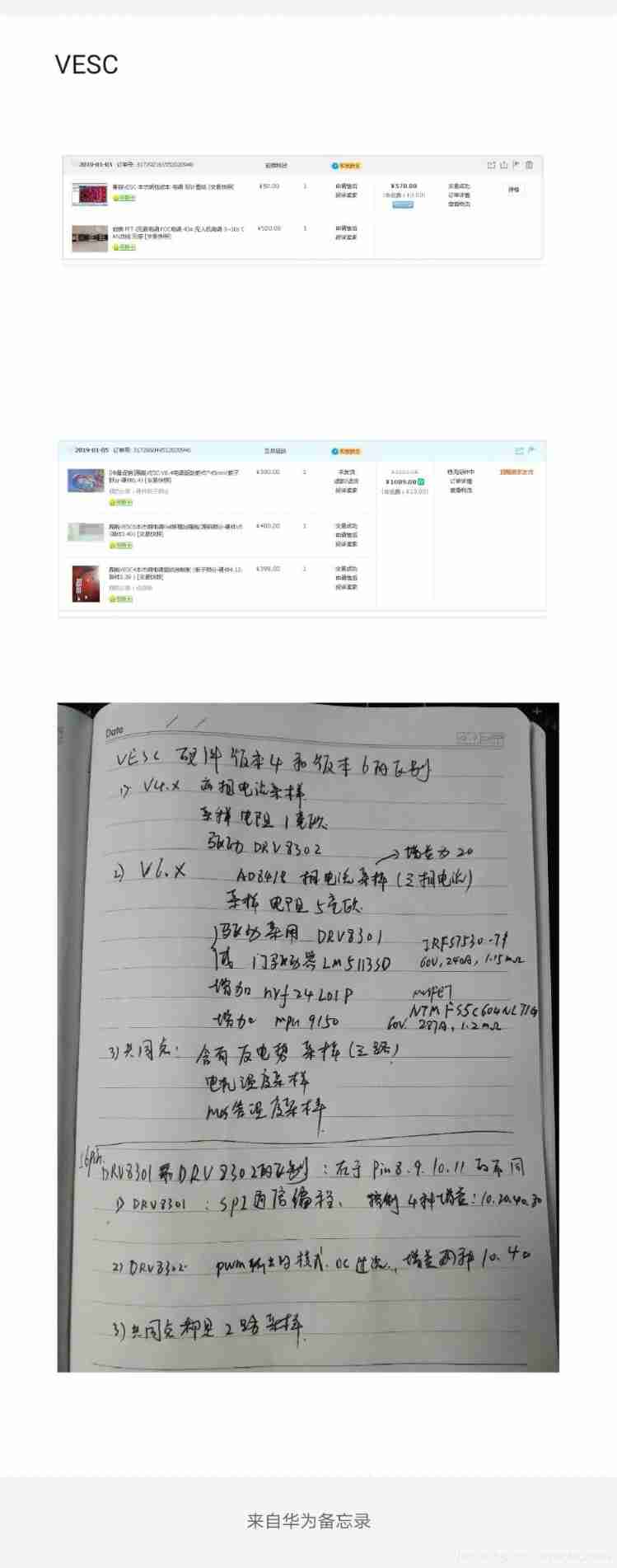
VESC Benjamin test motor parameters
随机推荐
[tutorial 15 of trio basic from introduction to proficiency] trio free serial communication
Management and use of DokuWiki (supplementary)
DokuWiki deployment notes
About yolov3, conduct map test directly
Embedded composition and route
Improve lighting C program
Imx6ull bare metal development learning 2- use C language to light LED indicator
LED display equipment records of the opening ceremony of the Beijing Winter Olympics
Relationship between line voltage and phase voltage, line current and phase current
UEFI development learning 6 - creation of protocol
Talk about the function of magnetic beads in circuits
Reasons for rapid wear of conductive slip rings
Correlation based template matching based on Halcon learning [II] find_ ncc_ model_ defocused_ precision. hdev
Design a clock frequency division circuit that can be switched arbitrarily
solver. Learning notes of prototxt file parameters
Semiconductor devices (III) FET
Working principle and type selection of common mode inductor
Zero length array in GNU C
【云原生 | 从零开始学Kubernetes】三、Kubernetes集群管理工具kubectl
Take you to understand the working principle of lithium battery protection board