当前位置:网站首页>ROS播包可视化
ROS播包可视化
2022-08-04 21:25:00 【moneymyone】
ROS播包可视化
1. 循环播放rosbag
一个终端启动roscore
roscore
另一个终端播放rosbag
rosbag play 2022-01-24.bag -l
rosbag play 2022-01-24.bag -l
[ INFO] [1656915294.661470192]: Opening 2022-01-24.bag
Waiting 0.2 seconds after advertising topics... done.
Hit space to toggle paused, or 's' to step.
[RUNNING] Bag Time: 1517156370.912962 Duration: 2.746406 / 2.873530
2.rviz打开
点击Add->添加topic
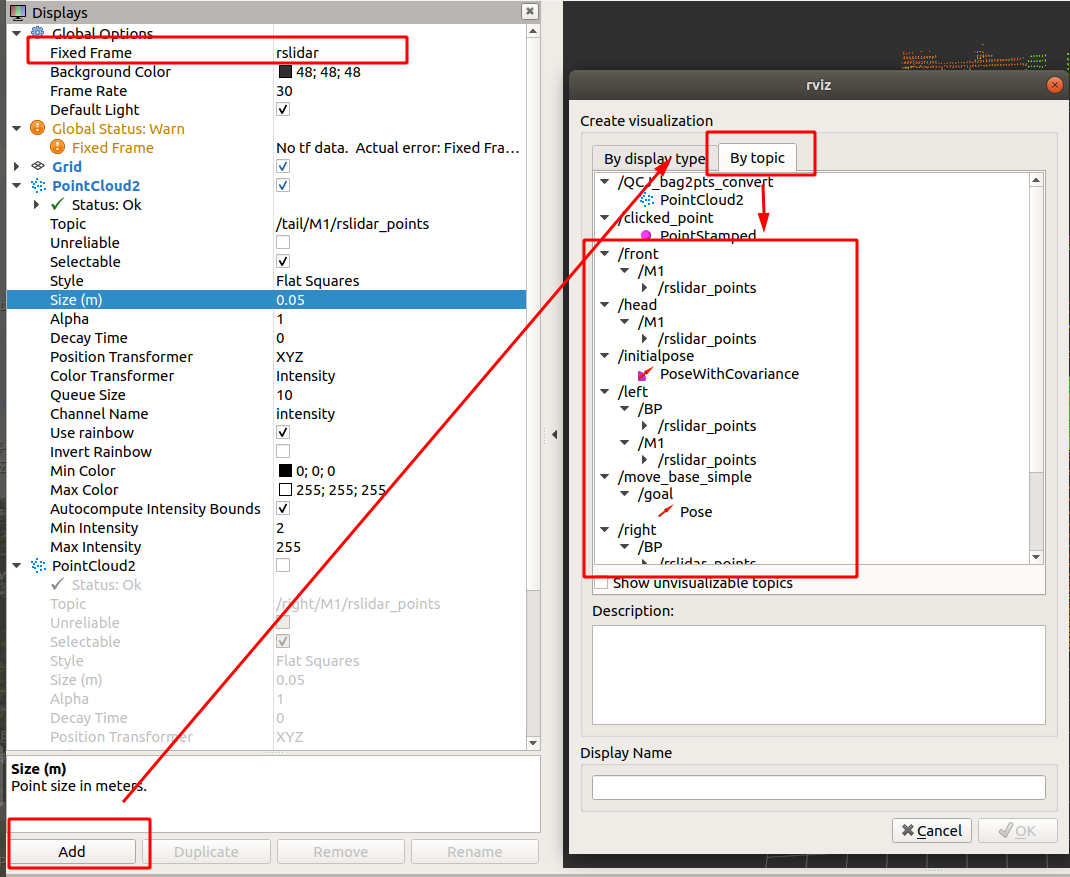
会显示fixed frame不正确,来看看该rosbag包中frame_id是什么,并且定义是什么?
查看rosbag对应topic的fixed frame
[email protected]:~$ rostopic echo /front/M1/rslidar_points | grep frame_id
frame_id: "/rslidar"
frame_id: "/rslidar"
frame_id: "/rslidar"
frame_id: "/rslidar"
frame_id: "/rslidar"
Fixed Frame
The Fixed Frame/固定参考系
The more-important of the two frames is the fixed frame. The fixed frame is the reference frame used to denote the “world” frame. This is usually the “map”, or “world”, or something similar, but can also be, for example, your odometry frame.
If the fixed frame is erroneously set to, say, the base of the robot, then all the objects the robot has ever seen will appear in front of the robot, at the position relative to the robot at which they were detected.
For correct results, the fixed frame should not be moving relative to the world.
If you change the fixed frame, all data currently being shown is cleared rather than re-transformed.
The Target Frame
The target frame is the reference frame for the camera view. For example, if your target frame is the map, you’ll see the robot driving around the map. If your target frame is the base of the robot, the robot will stay in the same place while everything else moves relative to it.
消息的头std_msgs/Header header中通常会有该信息。
标准头信息主要包括:
seq是消息的顺序标识,不需要手动设置,发布节点在发布消息时,会自动累加。timestamp是消息中与数据相关联的时间戳,例如激光数据中,时间戳对应激光数据的采集时间点。frame_id是消息中与数据相关联的参考系id,例如在在激光数据中,frame_id对应激光数据采集的参考系。
例如LaserScan消息结构:
std_msgs/Header header # 标准头信息
uint32 seq
time stamp
string frame_id # in frame frame_id, angles are measured around the positive Z axis (counterclockwise, if Z is up) with zero angle being forward along the x axis
float32 angle_min # start angle of the scan [rad]
float32 angle_max # end angle of the scan [rad]
float32 angle_increment # angular distance between measurements [rad]
float32 time_increment # time between measurements [seconds] - if your scanner
# is moving, this will be used in interpolating position of 3d points
float32 scan_time # time between scans [seconds
float32 range_min # minimum range value [m]
float32 range_max # maximum range value [m]
float32[] ranges # range data [m] (Note: values < range_min or > range_max should be discarded)
float32[] intensities # intensity data [device-specific units]. If your device does not provide intensities, please leave the array empty.
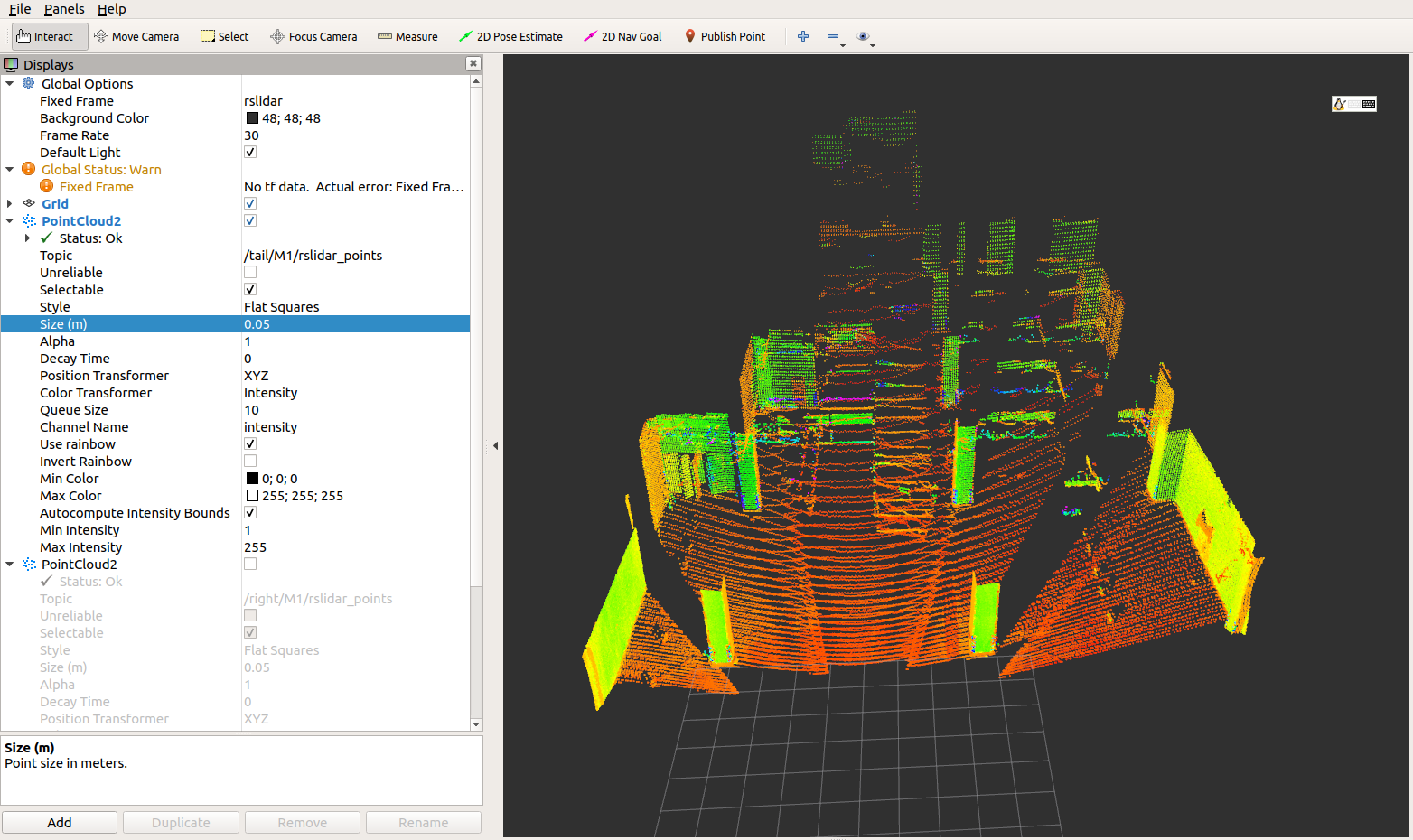
修改为正确的frame_id, 然后就能正确显示啦:
代码播报
#include "ros/ros.h"
#include"std_msgs/Int32.h"
#include <iostream>
int main(int argc, char **argv)
{
ros::init(argc, argv, "demo_topic_publisher");
ros::NodeHandle node_obj;
ros::Publisher number_publisher = node_obj.advertise<std_msgs::Int32>("/numbers",10); // topic
ros::Rate loop_rate(10);
int number_count = 0;
while(ros::ok()) {
std_msgs::Int32 msg;
msg.data = number_count;
ROS_INFO("%d",msg.data);
number_publisher.publish(msg);
ros::spinOnce();
loop_rate.sleep();
++number_count;
}
return 0;
}
ros会一直播数字
[ INFO] [1657537136.415226386]: 977
[ INFO] [1657537136.515237562]: 978
[ INFO] [1657537136.615177688]: 979
[ INFO] [1657537136.715232163]: 980
[ INFO] [1657537136.815237120]: 981
[ INFO] [1657537136.915179913]: 982
[ INFO] [1657537137.015181264]: 983
[ INFO] [1657537137.115259284]: 984
查看topic及信息
$ rostopic list
/clock
/numbers
/points_raw
/pose
/rosout
/rosout_agg
$ rostopic echo /numbers
data: 388
---
data: 389
---
data: 390
---
data: 391
---
data: 392
---
data: 393
---
Reference
- http://wiki.ros.org/rviz/UserGuide#Coordinate_Frames
- The frame_id in a message specifies the point of reference for data contained in that message: https://blog.csdn.net/xu_fengyu/article/details/86562827
边栏推荐
猜你喜欢
mdk5.14无法烧录
js data type, throttling/anti-shake, click event delegation optimization, transition animation

LayaBox---TypeScript---首次接触遇到的问题
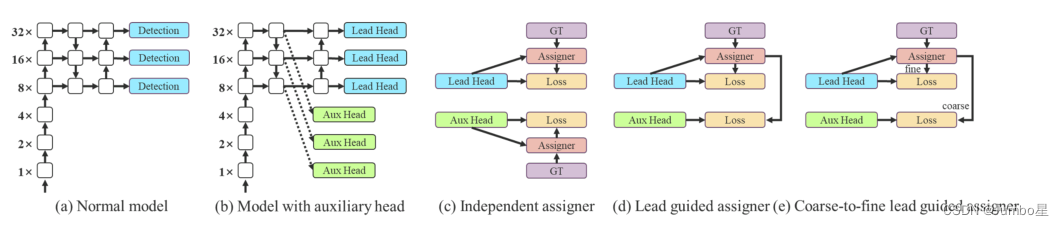
Yolov7:Trainable bag-of-freebies sets new state-of-the-art for real-time objectdetectors
零基础都能拿捏的七夕浪漫代码,快去表白或去制造惊喜吧

PowerCLi 导入License到vCenter 7
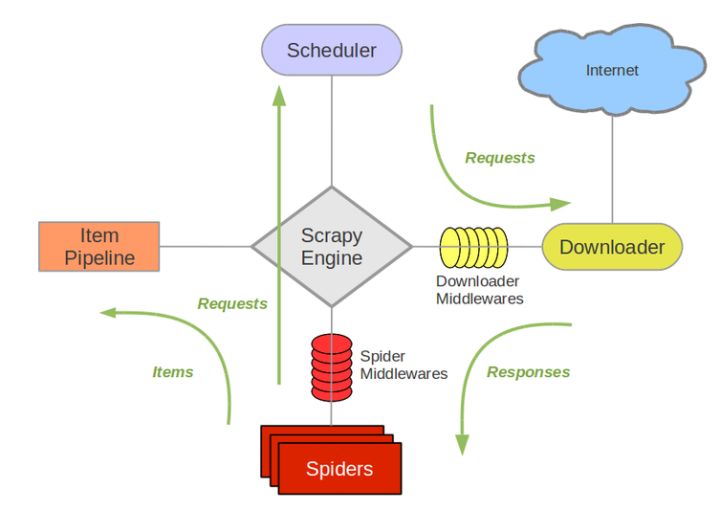
How to understand the crawler's Scrapy framework in the simplest and most popular way?
mysql基础
使用堡塔应用管理器配置laravel队列方法
Chapter7 : Network-Driven Drug Discovery
随机推荐
LayaBox---TypeScript---Problems encountered at first contact
STM32MP157A驱动开发 | 01- 板载LED作为系统心跳指示灯
Common methods of js's new Function()
【编程思想】
AtCoder Beginner Contest 262 D - I Hate Non-integer Number
How to understand the crawler's Scrapy framework in the simplest and most popular way?
mdk5.14 cannot be burned
LayaBox---TypeScript---结构
JWT主动校验Token是否过期
bracket matching
adb shell input keyevent 模拟按键事件
Win11如何开启Telnet客户端?
【CC3200AI 实验教程 1】疯壳·AI语音人脸识别(会议记录仪/人脸打卡机)-开发环境搭建
数电快速入门(四)(组合逻辑电路的分析以及设计的介绍)
Named routes, the role of name in components
LINQ to SQL (Group By/Having/Count/Sum/Min/Max/Avg操作符)
【2022杭电多校5 1003 Slipper】多个超级源点+最短路
Arduino 电机测速
1319_STM32F103串口BootLoader移植
stm32mp157系统移植 | 移植ST官方5.10内核到小熊派开发板