当前位置:网站首页>GNSS positioning accuracy index calculation
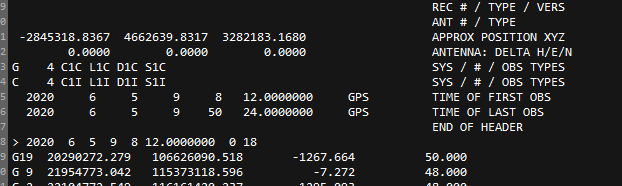
GNSS positioning accuracy index calculation
2022-07-06 12:54:00 【Proletarians】
According to whether there is a reference point ( Truth value ), There are two calculation methods .
Mode one : No truth value
No truth value , Then the calculation is the internal coincidence accuracy —— Positioning deviation (position deviation);
Because there is no external reference , Therefore, the average value should be used for data analysis center.
The most important thing is to change the coordinate system into ENU, Again according to deviation Formula of , It is divided into 2D and 3D In the form of .
Mode two : True value
True value , Explain that there are external references , It is necessary to calculate center From the average value to the true value point . At this point, you can calculate CEP50,CEP95,RMS Three indicators ;
1、CEP50 and CEP95
stay BLH In a coordinate system , Among them, we need to use the knowledge of geodesic , Sort the calculated distance , take 50% or 95% that will do .
2、RMS
In the plane , stay ENU Calculate in the coordinate system ; On elevation , stay BLH Coordinate system .
边栏推荐
- Unity3d, Alibaba cloud server, platform configuration
- [算法] 剑指offer2 golang 面试题12:左右两边子数组的和相等
- Teach you to release a DeNO module hand in hand
- Compilation principle: preprocessing of source program and design and implementation of lexical analysis program (including code)
- There is no red exclamation mark after SVN update
- Unity3D制作注册登录界面,并实现场景跳转
- C code implementation of robust estimation in rtklib's pntpos function (standard single point positioning spp)
- 【GNSS数据处理】赫尔默特(helmert)方差分量估计解析及代码实现
- NovAtel 板卡OEM617D配置步骤记录
- 使用rtknavi进行RT-PPP测试
猜你喜欢
![[算法] 剑指offer2 golang 面试题2:二进制加法](/img/c2/6f6c3bd4d70252ba73addad6a3a9c1.png)
[算法] 剑指offer2 golang 面试题2:二进制加法
抗差估计在rtklib的pntpos函数(标准单点定位spp)中的c代码实现
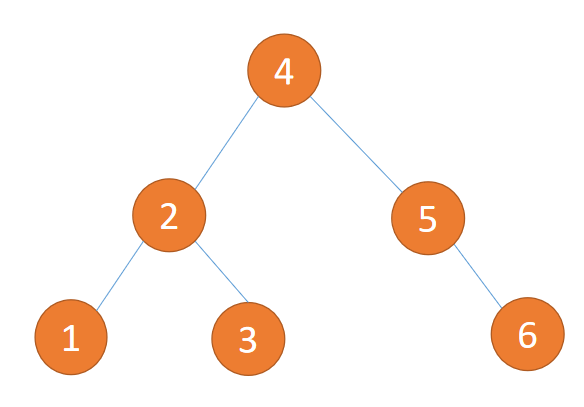
平衡二叉树详解 通俗易懂
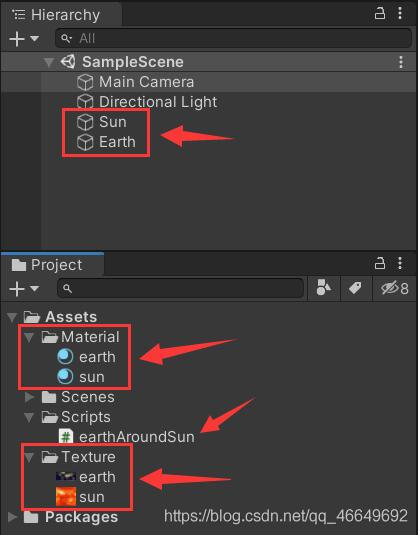
地球围绕太阳转
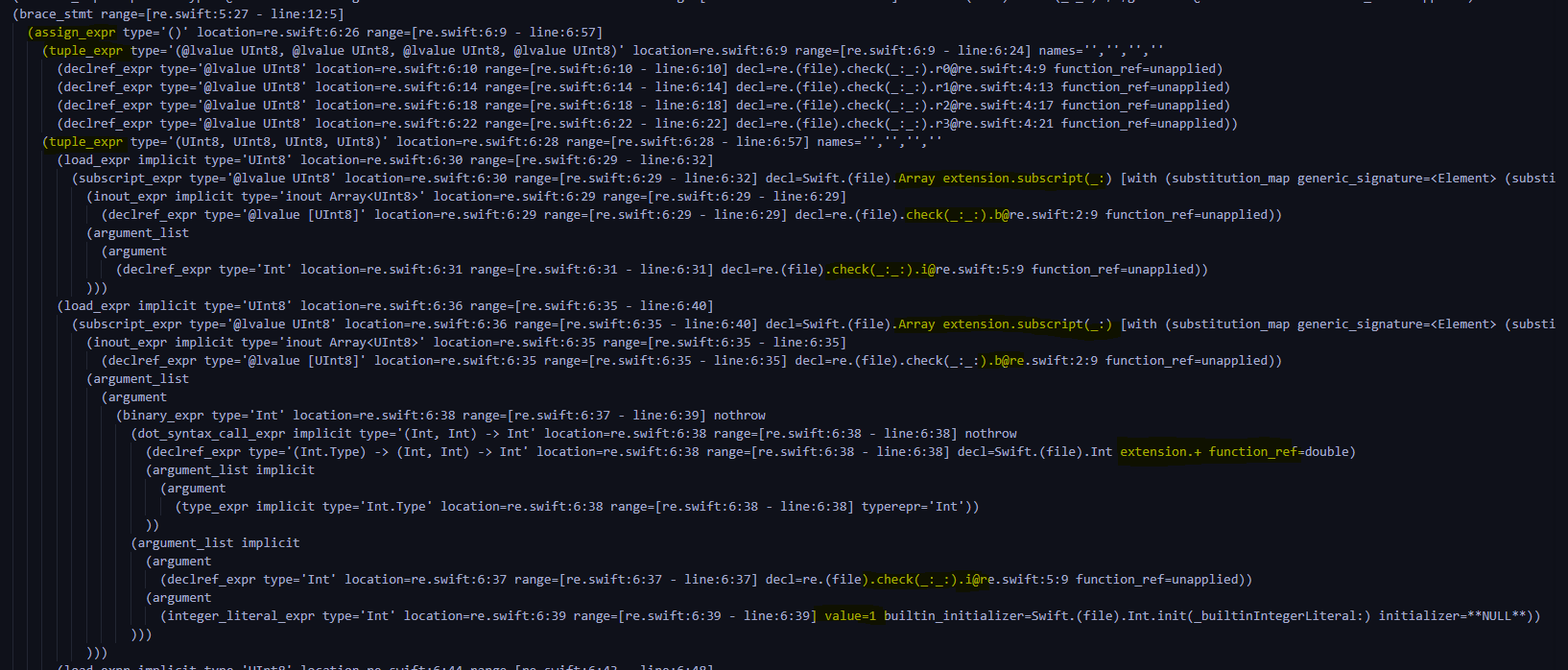
2022国赛Re1 baby_tree
[algorithme] swordfinger offer2 golang question d'entrevue 2: addition binaire
Teach you to release a DeNO module hand in hand
![[algorithm] sword finger offer2 golang interview question 3: the number of 1 in the binary form of the first n numbers](/img/64/0f352232359c7d44f12b20a64c7bb4.png)
[algorithm] sword finger offer2 golang interview question 3: the number of 1 in the binary form of the first n numbers
idea问题记录
Office提示您的许可证不是正版弹框解决
随机推荐
Implementation of Excel import and export functions
Database course design: college educational administration management system (including code)
FairyGUI增益BUFF数值改变的显示
Halcon knowledge: gray_ Tophat transform and bottom cap transform
【RTKLIB 2.4.3 b34 】版本更新简介一
[offer29] sorted circular linked list
Basic DOS commands
Game 280 weekly
Lean product development - Lean Software Development & lean product development
(the first set of course design) 1-4 message passing interface (100 points) (simulation: thread)
【GNSS】抗差估计(稳健估计)原理及程序实现
平衡二叉树详解 通俗易懂
Compilation principle: preprocessing of source program and design and implementation of lexical analysis program (including code)
Mixed use of fairygui button dynamics
记录:动态Web项目servlet访问数据库404错误之解决
Knowledge system of digital IT practitioners | software development methods -- agile
Derivation of logistic regression theory
Office提示您的许可证不是正版弹框解决
idea中导包方法
【无标题】