当前位置:网站首页>Part 7: STM32 serial communication programming
Part 7: STM32 serial communication programming
2022-07-07 00:51:00 【Heavy vehicle water】
1. Basic concepts of communication
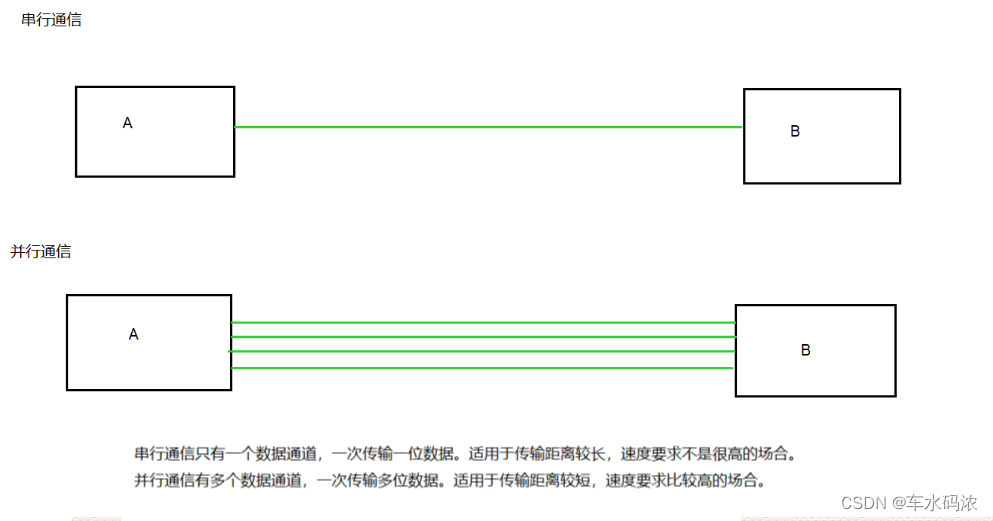
(1) Serial communication and parallel communication
(2) Simplex , Half duplex and full duplex
(3) Communication rate
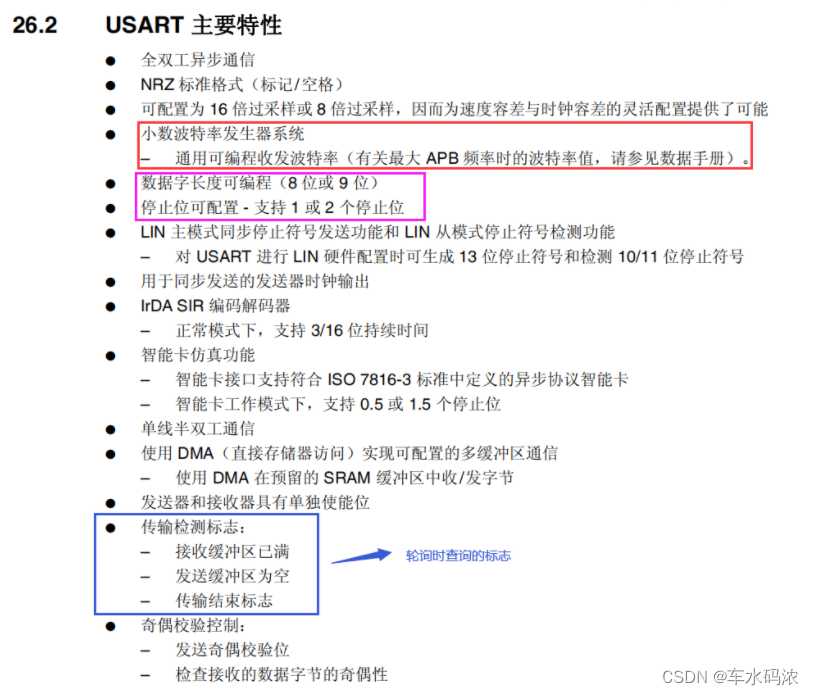
The number of bits transmitted per unit time indicates the transmission speed , It's called baud rate (bps)
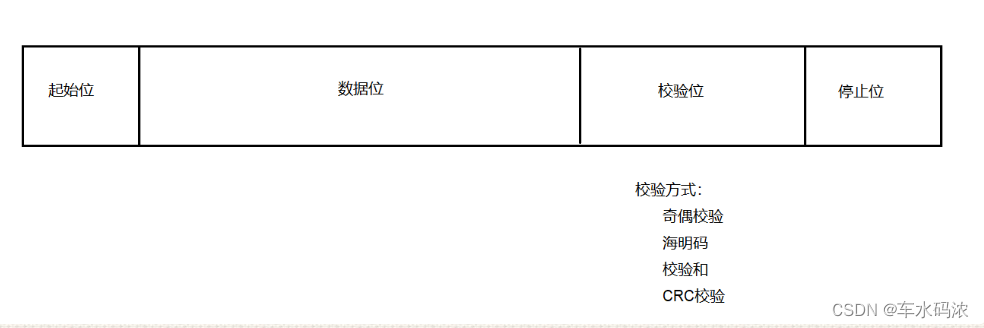
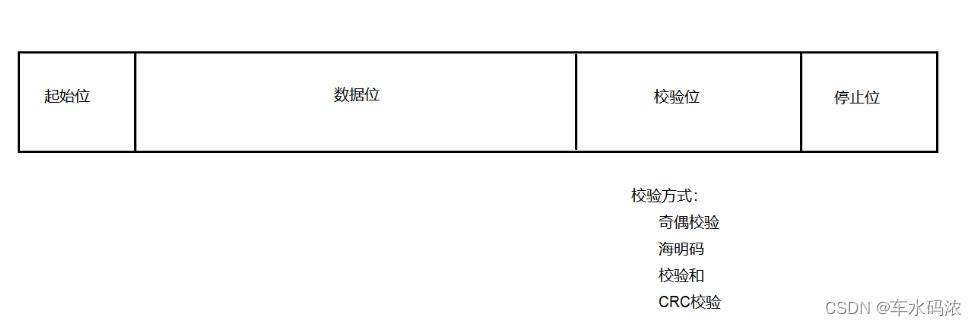
(4) Communication protocol ( A serial port )
Communication protocol is the data format agreed by both parties
2. Hardware connection of serial port
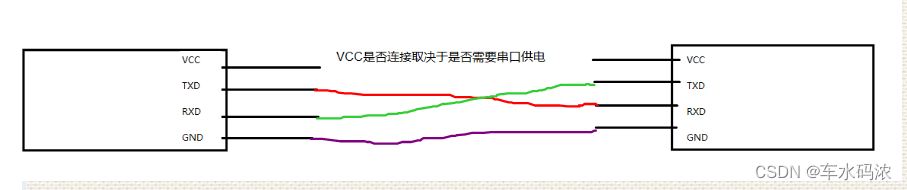
UART ----------------- Universal asynchronous transceiver
USART --------------- Universal synchronization / Asynchronous transceiver
3.stm32 Serial port development
(1) Schematic diagram
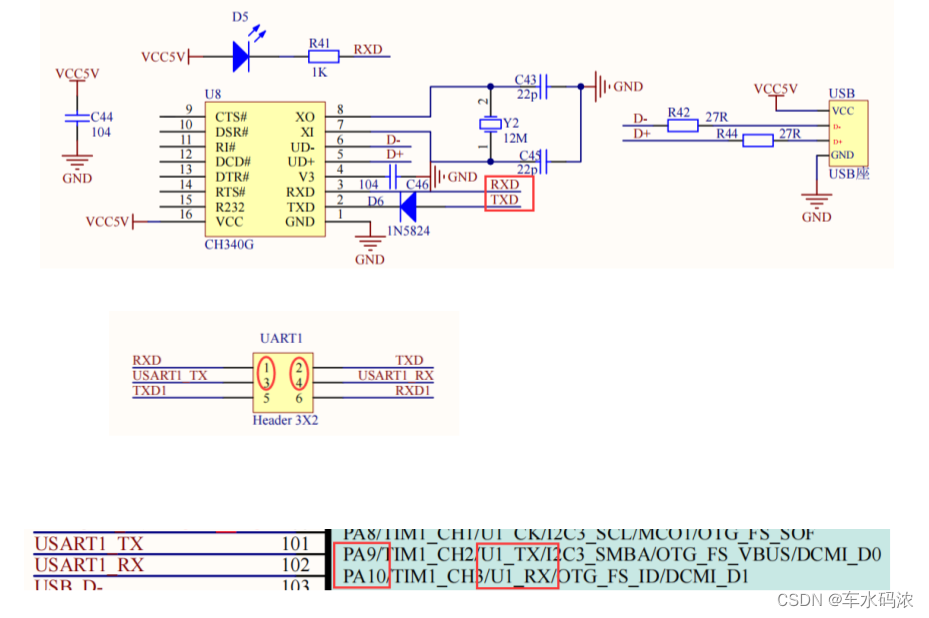
USB The debugging port is connected to CPU Of PA9 PA10, They have the function of serial port multiplexing
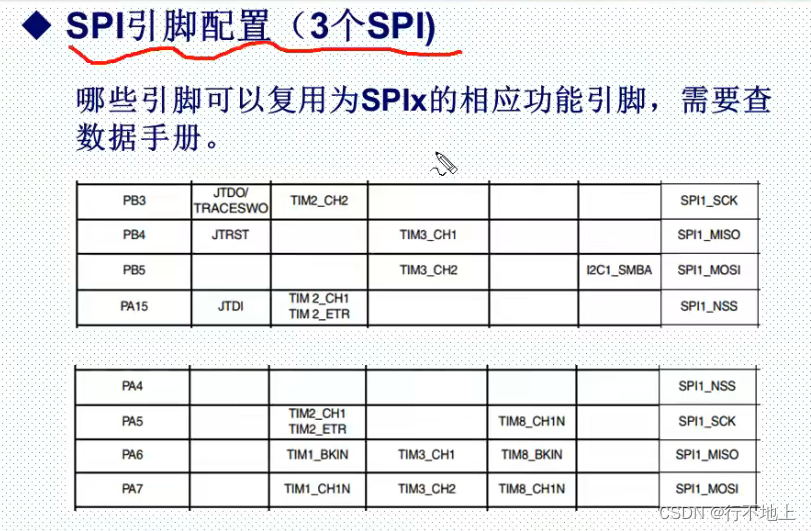
(2)CPU Chip manual
(3) Programming of serial interface
Add serial port library function source code in the project
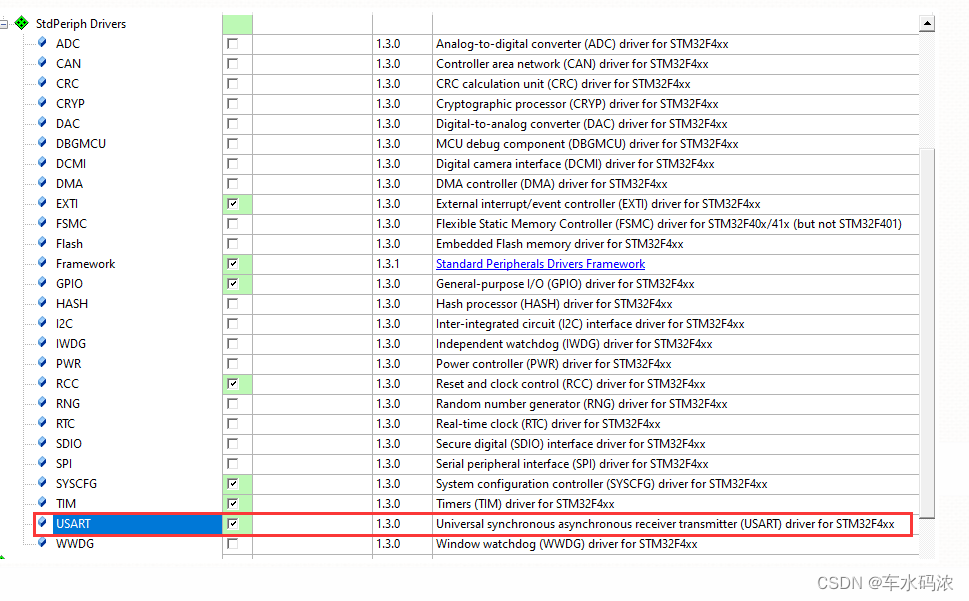
1) Turn on GPIOA and USART1 The clock of
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
2) take PA9 PA10 Configured as multiplexing function , And mapped to serial port 1
GPIO_Init(...); GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1);
3) Initialize serial port
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct); Parameters : USARTx - Which serial port
USART_InitStruct - Serial port initialization structure
typedef struct
{
uint32_t USART_BaudRate; /*!< Baud rate */
uint16_t USART_WordLength; /*!< Data bit length @ref USART_Word_Length */
uint16_t USART_StopBits; /*!< Stop bit length @ref USART_Stop_Bits */
uint16_t USART_Parity; /*!< Verification method @ref USART_Parity */
uint16_t USART_Mode; /*!< send out / Reception mode @ref USART_Mode */
uint16_t USART_HardwareFlowControl; /*!< Hardware flow control @ref USART_Hardware_Flow_Control */ } USART_InitTypeDef;
4) Enable serial port
USART_Cmd(USART1,ENABLE);
5) Sending and receiving data
send out :
// polling
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
// What data is sent to which serial port
// Before each transmission, check whether the previous data has been sent
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
// What symbol of the serial port to be transmitted , return SET Indicates that there is this flag , return RESET Indicates that there is no such flag
//USART_FLAG_TC ----- Send completion flag
———————————————————————————————————————————
practice :
Realize serial port 1 Sending strings
———————————————————————————————————————————
// Function code
#include <stm32f4xx.h>
#include <usart.h>
#include <stdio.h>
#include <string.h>
#include <includes.h>
//stm32 Run the program on the development board , If the host runs the debugger , The program will use the input and output devices of the host
// This is called semi host mode ,printf If you want to print through serial port , Half host mode must be turned off
#pragma import(__use_no_semihosting)
struct __FILE{
int handle;
};
FILE __stdout;
// Definition _sys_exit Function avoid using semi host mode
void _sys_exit(int x)
{
x = x;
}
// redefinition fputc
int fputc(int ch,FILE *F)
{
// Wait for the last data to be sent
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);
// send out
USART_SendData(USART1,ch);
return ch;
}
void usart1_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
USART_InitTypeDef USART_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
//1. Turn on GPIOA and USART1 The clock
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
//2. To configure PA9 PA10 Serial port function
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF;// Reuse mode
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;// Push pull output
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;// High speed
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;// No up and down
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_10;
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1);
//3. Initialize serial port 8N1
USART_InitStruct.USART_BaudRate = 115200;// Baud rate
USART_InitStruct.USART_WordLength = USART_WordLength_8b;//8 Digit bit
USART_InitStruct.USART_StopBits = USART_StopBits_1;//1 Bit stop bit
USART_InitStruct.USART_Parity = USART_Parity_No;// No verification
USART_InitStruct.USART_Mode = USART_Mode_Rx|USART_Mode_Tx;// Send receive mode
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;// No hardware flow control
USART_Init(USART1,&USART_InitStruct);
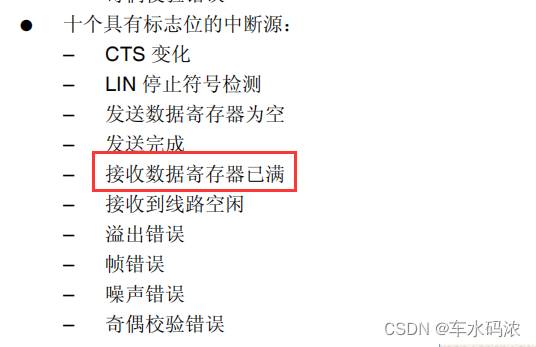
//4. Open serial port receive interrupt ( Clear interrupt flag )
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
//5. initialization NVIC
NVIC_InitStruct.NVIC_IRQChannel = USART1_IRQn;// A serial port 1 Interrupt channel
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0x2;// preemption
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0x2;// Response priority
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;// Can make
NVIC_Init(&NVIC_InitStruct);
//. Enable serial port
USART_Cmd(USART1,ENABLE);
}
// Send a character ( polling )
void uart1_putc(char ch)
{
// Wait for the last data to be sent
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);
USART_SendData(USART1,ch);
}边栏推荐
- If the college entrance examination goes well, I'm already graying out at the construction site at the moment
- How to set encoding in idea
- Advanced learning of MySQL -- basics -- multi table query -- inner join
- [user defined type] structure, union, enumeration
- Memory optimization of Amazon memorydb for redis and Amazon elasticache for redis
- Zabbix 5.0:通过LLD方式自动化监控阿里云RDS
- stm32F407-------SPI通信
- 【vulnhub】presidential1
- 【软件逆向-求解flag】内存获取、逆变换操作、线性变换、约束求解
- 一行代码实现地址信息解析
猜你喜欢
The programmer resigned and was sentenced to 10 months for deleting the code. Jingdong came home and said that it took 30000 to restore the database. Netizen: This is really a revenge
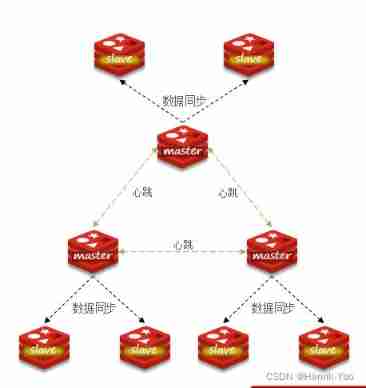
Distributed cache
Data analysis course notes (V) common statistical methods, data and spelling, index and composite index
Js+svg love diffusion animation JS special effects
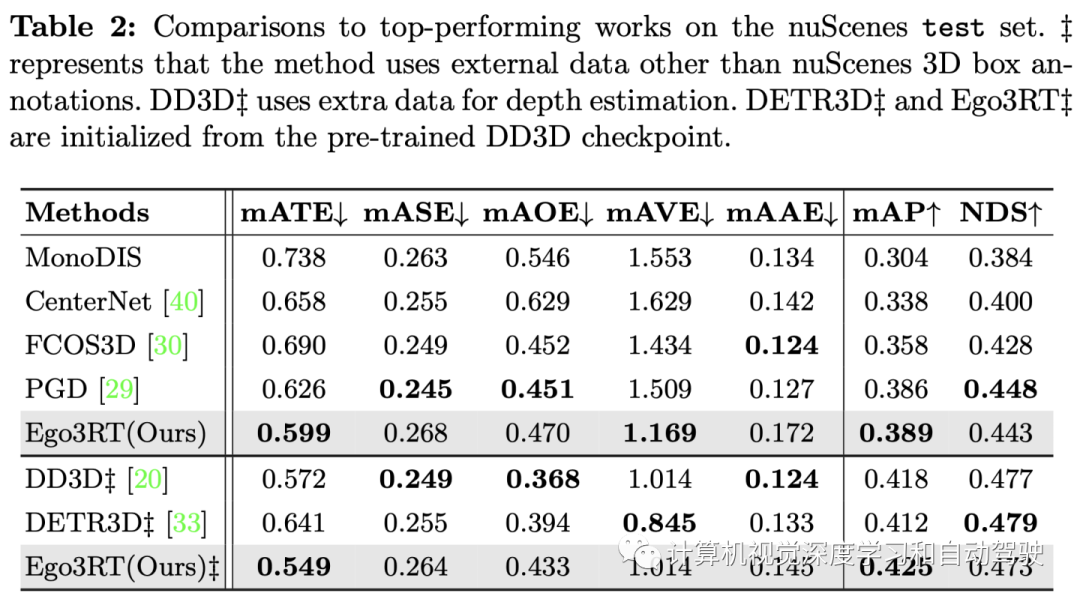
Learn self 3D representation like ray tracing ego3rt
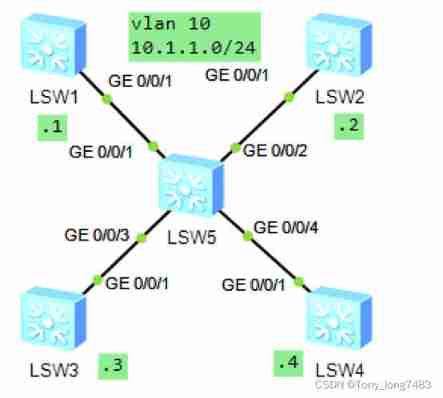
Dr selection of OSPF configuration for Huawei devices
Data processing of deep learning
![[yolov5 6.0 | 6.1 deploy tensorrt to torch serve] environment construction | model transformation | engine model deployment (detailed packet file writing method)](/img/1a/2b497a1baa04d84d28da715d097dfe.png)
[yolov5 6.0 | 6.1 deploy tensorrt to torch serve] environment construction | model transformation | engine model deployment (detailed packet file writing method)
stm32F407-------SPI通信
How to judge whether an element in an array contains all attribute values of an object
随机推荐
Deep learning environment configuration jupyter notebook
Article management system based on SSM framework
Three methods to realize JS asynchronous loading
stm32F407-------DAC数模转换
Attention slam: a visual monocular slam that learns from human attention
How to set encoding in idea
How to get started and improve test development?
Zynq transplant ucosiii
New feature of Oracle 19C: automatic DML redirection of ADG, enhanced read-write separation -- ADG_ REDIRECT_ DML
[user defined type] structure, union, enumeration
Zabbix 5.0:通过LLD方式自动化监控阿里云RDS
Command line kills window process
dynamic programming
Slam d'attention: un slam visuel monoculaire appris de l'attention humaine
Testers, how to prepare test data
OSPF configuration command of Huawei equipment
Understand the misunderstanding of programmers: Chinese programmers in the eyes of Western programmers
Attention SLAM:一種從人類注意中學習的視覺單目SLAM
509 certificat basé sur Go
学习使用代码生成美观的接口文档!!!