当前位置:网站首页>GTSAM中李群的运用
GTSAM中李群的运用
2022-07-06 05:58:00 【瞻邈】
1. AdjointMap定义
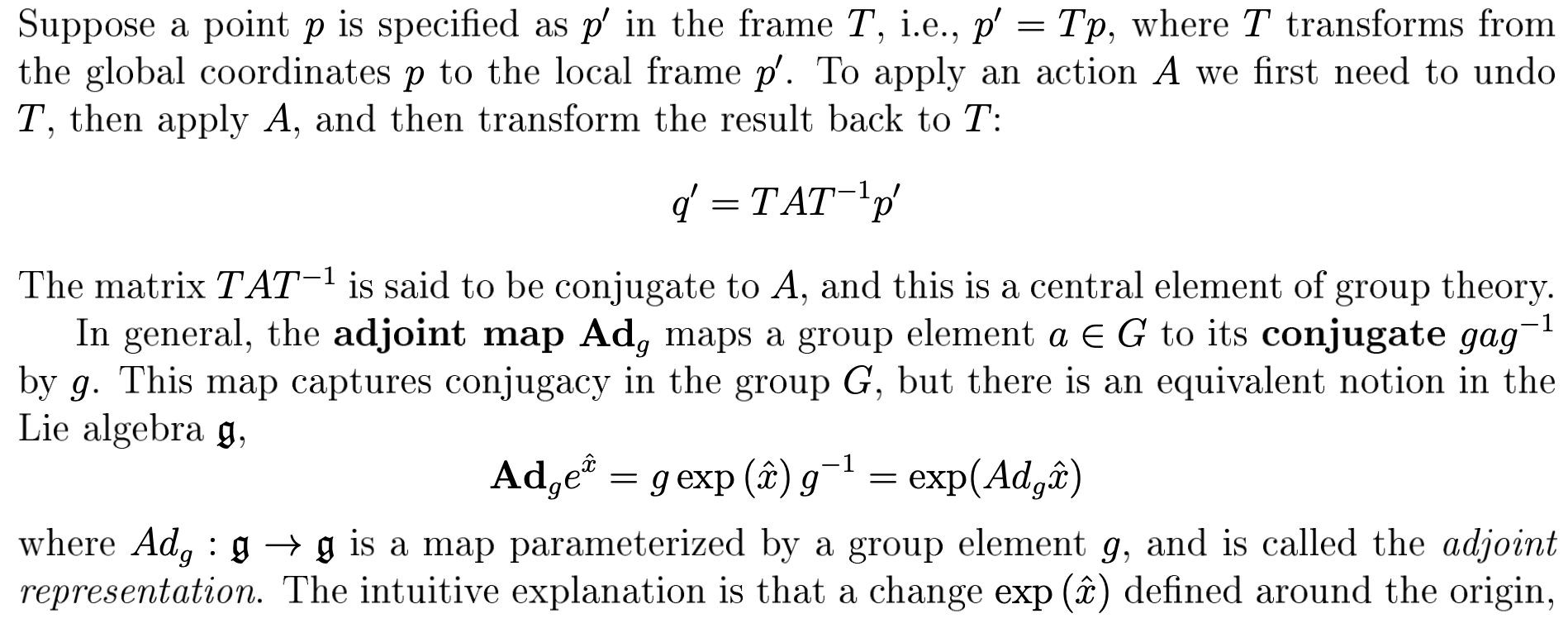
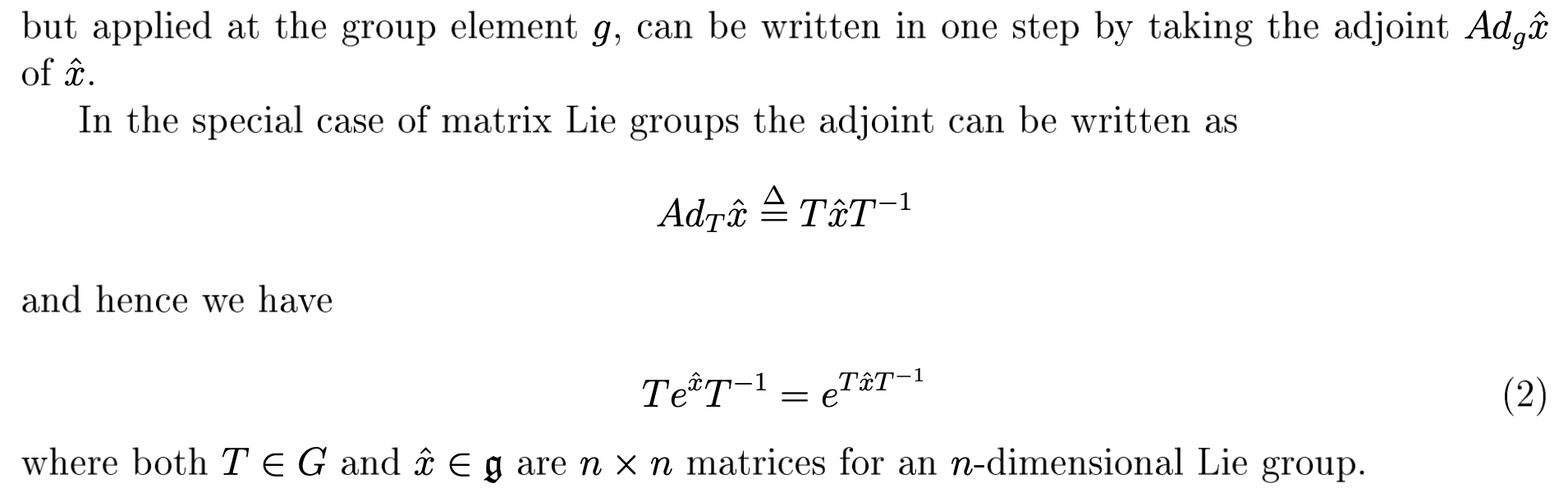
为何在矩阵李群中,上述两种定义可以混用呢?证明如下

2. 李群的AdjointMap
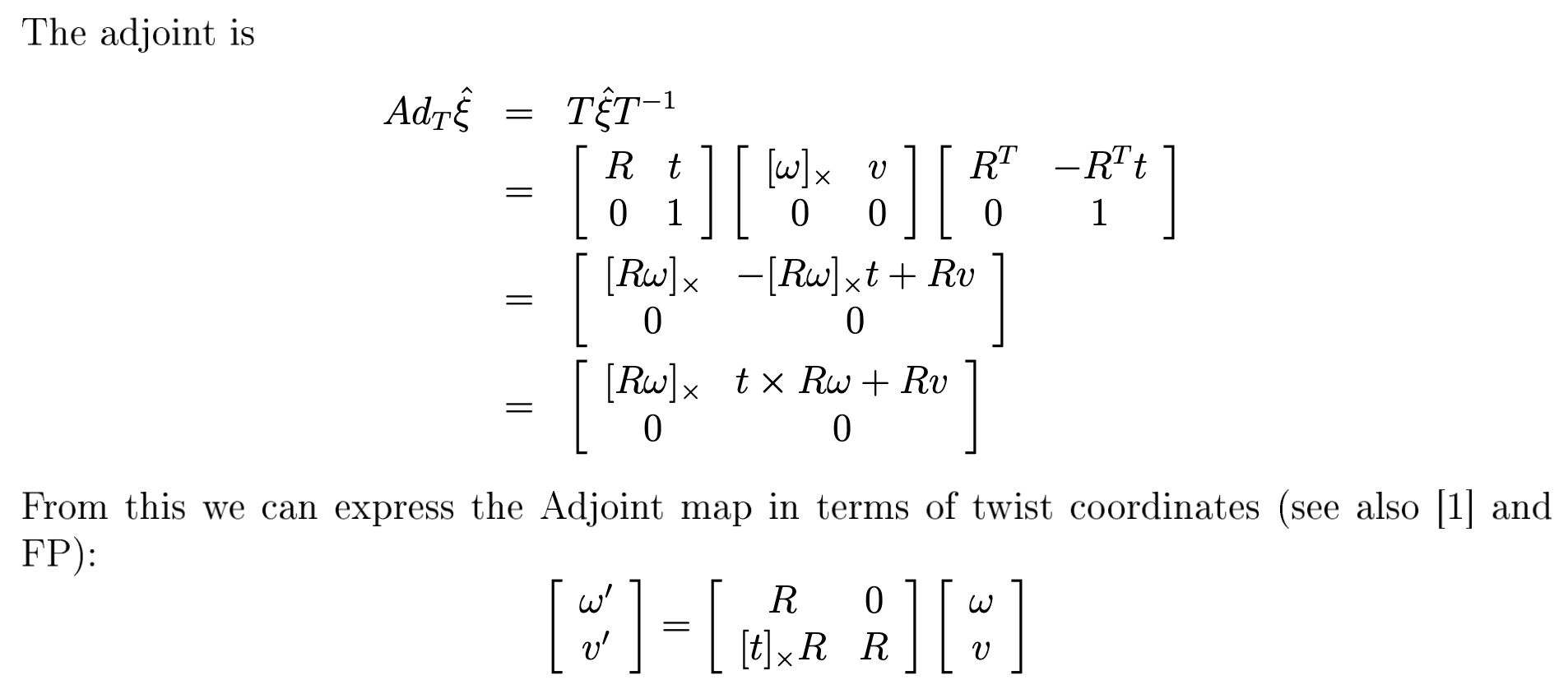
上面的公式如何得出下面的结论
AdjointMap是反对称矩阵到反对称矩阵的映射
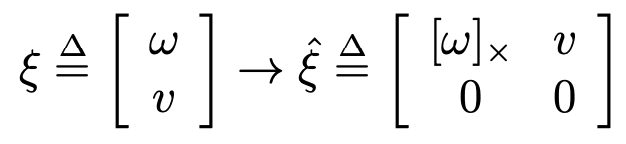
令

则上面的公式可以写成下式
![\begin{bmatrix} [\omega']_{\times} & v' \\ 0 & 0 \end{bmatrix} = \begin{bmatrix} [R\omega]_{\times} & t \times R\omega + Rv \\ 0 & 0 \end{bmatrix} \Rightarrow \begin{cases} \omega' = R \omega \\ v' = t \times R\omega + Rv \end{cases}](http://img.inotgo.com/imagesLocal/202207/06/202207060557471698_2.gif)
继而推得下面的式子
3. Local Coordinates

有这样一个公式

证明如下

4. ImuFactor
![]()
![\frac{\partial R_k}{\partial \theta_k} = H(\theta_k) = \sum_{k=0}^{\infty} \frac{(-1)^k}{(k+1)!}[\theta]_{\times}^k](http://img.inotgo.com/imagesLocal/202207/06/202207060557471698_9.gif)
证明
由
![]() 得
得
![\frac{\partial R_k}{\partial \theta_k} \\ = \lim_{\delta \rightarrow0} \frac{ exp([\theta + \delta]_{\times}) \ominus exp([\theta]_{\times}) }{\delta} \\ = \lim_{\delta \rightarrow0} \frac{Log \left( exp([-\theta]_{\times}) exp([\theta + \delta]_{\times}) \right) }{\delta} \\ = \lim_{\delta \rightarrow0} \frac{Log \left( exp([-\theta]_{\times}) exp([\theta]_{\times}) exp([H(\theta)\delta]_{\times}) \right) }{\delta} \\ = \lim_{\delta \rightarrow0} \frac{Log \left( exp([H(\theta)\delta]_{\times}) \right) }{\delta} \\ = H(\theta)](http://img.inotgo.com/imagesLocal/202207/06/202207060557471698_7.gif)
边栏推荐
- Company video accelerated playback
- Market development prospect and investment risk assessment report of China's humidity sensor industry from 2022 to 2028
- wib3.0 跨越,在跨越(ง •̀_•́)ง
- [SQL Server fast track] - authentication and establishment and management of user accounts
- J'ai un chaton.
- Auto. JS learning notes 17: basic listening events and UI simple click event operations
- Baidu online AI competition - image processing challenge: the 8th program of handwriting erasure
- [Jiudu OJ 08] simple search x
- IPv6 comprehensive experiment
- The difference and usage between continue and break
猜你喜欢
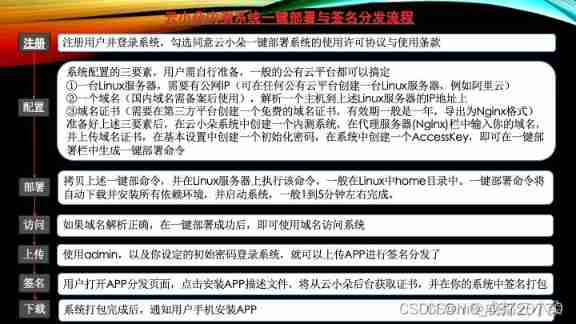
Yunxiaoduo software internal test distribution test platform description document

Analysis report on development trends and investment planning of China's methanol industry from 2022 to 2028

The ECU of 21 Audi q5l 45tfsi brushes is upgraded to master special adjustment, and the horsepower is safely and stably increased to 305 horsepower

Usage of test macro of GTEST

Hongliao Technology: Liu qiangdong's "heavy hand"

Is it difficult for an information system project manager?
C language bubble sort
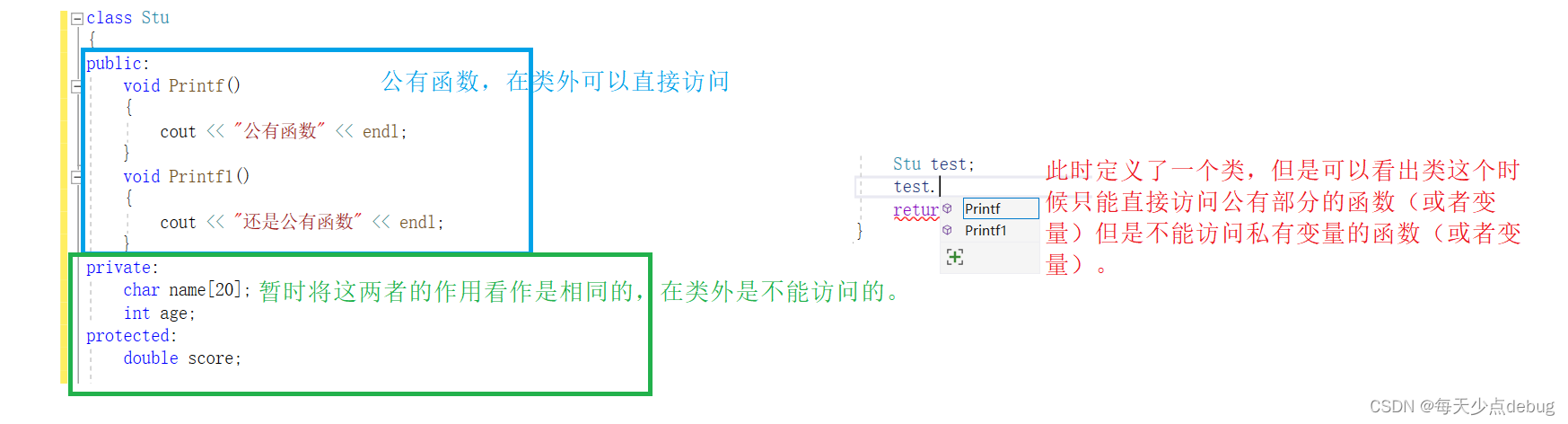
类和对象(一)this指针详解
HCIA复习
Market development prospect and investment risk assessment report of China's humidity sensor industry from 2022 to 2028
随机推荐
Gtest之TEST宏的用法
Arrays and collections
Summary of data sets in intrusion detection field
A master in the field of software architecture -- Reading Notes of the beauty of Architecture
How to recover Huawei router's forgotten password
B站刘二大人-线性回归及梯度下降
What impact will frequent job hopping have on your career?
B站刘二大人-线性回归 Pytorch
AUTOSAR从入门到精通番外篇(十)-嵌入式S19文件解析
【论文阅读】NFlowJS:基于鲁棒学习的合成负数据密集异常检测
The ECU of 21 Audi q5l 45tfsi brushes is upgraded to master special adjustment, and the horsepower is safely and stably increased to 305 horsepower
H3C V7 switch configuration IRF
Li Chuang EDA learning notes 12: common PCB board layout constraint principles
Pytorch代码注意的细节,容易敲错的地方
Database: ODBC remote access SQL Server2008 in oracel
About PHP startup, mongodb cannot find the specified module
Web服务连接器:Servlet
Detailed explanation of BF and KMP
Novice entry SCM must understand those things
Station B, Mr. Liu Er - multiple logistic regression, structure 7