当前位置:网站首页>[filter tracking] strapdown inertial navigation simulation based on MATLAB [including Matlab source code 1935]
[filter tracking] strapdown inertial navigation simulation based on MATLAB [including Matlab source code 1935]
2022-07-07 11:46:00 【Poseidon light】
One 、 How to get the code
How to get the code 1:
The complete code has been uploaded to my resources :【 Filter tracking 】 be based on matlab Strapdown inertial navigation simulation 【 contain Matlab Source code 1935 period 】
How to get the code 2:
By subscribing to Ziji Shenguang blog Paid column , With proof of payment , Private Blogger , This code is available .
remarks : Subscribe to Ziji Shenguang blog Paid column , Free access to 1 Copy code ( The period of validity From the Subscription Date , Valid for three days );
Two 、 Introduction to strapdown inertial navigation simulation
1 Strapdown inertial navigation system error equation
When the navigation system adopts the Northeast celestial coordinate system, the error equation of the strapdown inertial navigation system is :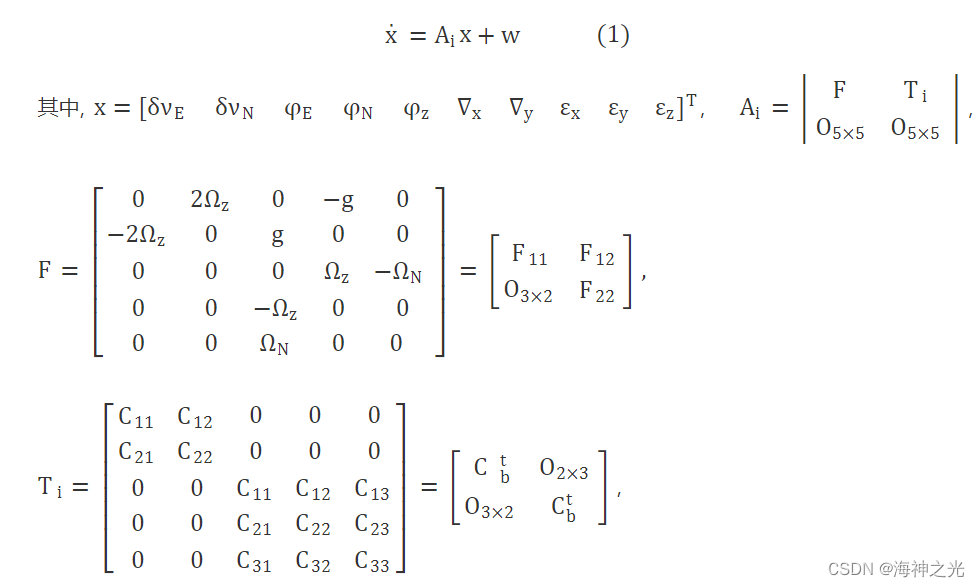
δνE、δνN Is the velocity error along the East 、 North component ;φE、φN、φZ The misalignment angle is in the East 、 north 、 The component of the sky ;∇x、∇x Is the zero bias of the accelerometer ;εx、εy、εz For gyro drift ;ΩN、ΩZ For the earth to rotate in the North 、 Projection of the sky ;Ctb From computer system to navigation system ( Northeast sky coordinate system ) Transformation matrix of ;w Is the white noise vector .
Use the horizontal output of the accelerometer as the measured value , Then the measurement equation is :
z=Cx+ν
In style C=[I2O2×8], I Is the unit matrix ;ν Is the white noise vector . If you want the Kalman filter to have a satisfactory filtering effect , Need to understand the observability of the system . For any fixed position
RankVi=7Vi=[CT ATiCT (ATi)2CT (ATi)3CT (ATi)4CT (ATi)5CT (ATi)6CT (ATi)7CT (ATi)8CT (ATi)9CT]T (3)
It can be seen that the system is unobservable , Therefore, one position alignment cannot estimate all States .
3、 ... and 、 Partial source code
%**************************************************************************
% Pure inertial navigation solution master function
%IMU Of b-frame It's the front right bottom , The data file format is :
%GPS Weekly seconds 、Gx、Gy、Gz、Ax、Ay、Az (G For gyro ,A Represents accelerometer )
% Gyro and accelerometer data are in incremental form , The units are rad and m/s
% The navigation coordinates are northeast
%**************************************************************************
clc;
clear;
close all
format long
%WGS84 Ellipsoid parameter
WGS84.a = 6378137.0;% Long half axis
WGS84.b=6356752.3142;% Short half shaft
WGS84.f = 1/298.257223563;% Oblateness
WGS84.e2=0.00669437999013;% First eccentricity squared
WGS84.ep2=0.006739496742227;% Second eccentricity squared
WGS84.we=7.292115e-5;% Earth rotation rate
WGS84.GM=3.986004418e+14;% Gravity is constant
WGS84.ge=9.7803267715;% Equatorial gravitational acceleration
WGS84.gp=9.8321863685;% Polar gravitational acceleration
BLH0=[23.1373950708/180*pi; 113.3713651222/180*pi;2.175 ];% initial position ( weft rad, the rad, high m)
v0=[0;0;0];% Initial speed (m/s)
Euler0(1,1)=0.0107951084511778/180*pi;% Initial Euler angle roll
Euler0(2,1)=-2.14251290749072/180*pi;%pitch
Euler0(3,1)= -75.7498049314083/180*pi;%yaw
qbn0=EulerToQuaternion(Euler0);% Initial attitude quaternion
Cbn0=QuaternionToDCM(qbn0);% Initial direction cosine matrix
fid=fopen('Data1.bin','r');% Open the original data file
fp=fopen('Result.txt','w');% Open the text used to save the results
fb=fopen('Data1_PureINS.bin','r');% Open the reference result file
fd=fopen('error.txt','w');% Open the file that saves the difference
fe=fopen('Data1_PureINS.txt','w');% Open the file that saves the reference results
t0=91620.0;% Initial time
Deltatheta0=[0;0;0];% Initial gyro output
Deltav0=[0;0;0];% Initial accelerometer output
button=questdlg(' Whether to draw coordinate map in real time ?( Real time plotting is extremely slow !)',' Tips ','Yes','No','No');
if strcmp(button,'Yes')==1
figure;
plot3(BLH0(1)*180/pi,BLH0(2)*180/pi,BLH0(3),'.r');
grid on;
hold on
end
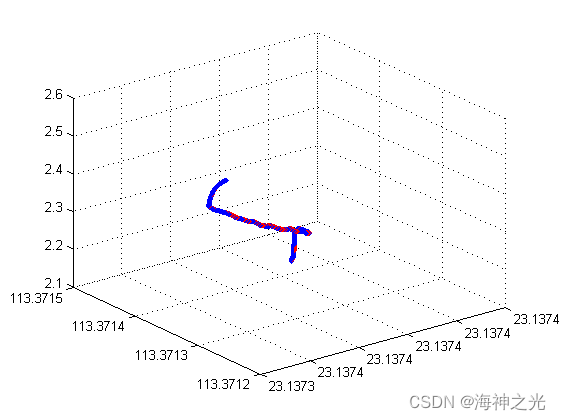
Four 、 Running results
5、 ... and 、matlab Edition and references
1 matlab edition
2014a
2 reference
[1] Shen Zaiyang . Master MATLAB signal processing [M]. tsinghua university press ,2015.
[2] Gao Baojian , Peng Jinye , Wang Lin , Pan Jianshou . Signals and systems —— Use MATLAB Analysis and Implementation [M]. tsinghua university press ,2020.
[3] Wang Wenguang , Wei Shaoming , Ren Xin . Signal processing and system analysis MATLAB Realization [M]. Electronic industry press ,2018.
[4] Wang Yandong , Fan Yuezu . Research on multi position alignment of strapdown inertial navigation system [J]. Chinese Journal of Inertial Technology . 2000,(03)
3 remarks
This part of the introduction is taken from the Internet , For reference only , If infringement , Contact deletion
边栏推荐
- The running kubernetes cluster wants to adjust the network segment address of pod
- Enclosed please find. Net Maui's latest learning resources
- 對比學習之 Unsupervised Learning of Visual Features by Contrasting Cluster Assignments
- Suggestions on one-stop development of testing life
- Cmu15445 (fall 2019) project 2 - hash table details
- Neural approvals to conversational AI (1)
- [Yugong series] go teaching course 005 variables in July 2022
- 请查收.NET MAUI 的最新学习资源
- R语言使用quantile函数计算评分值的分位数(20%、40%、60%、80%)、使用逻辑操作符将对应的分位区间(quantile)编码为分类值生成新的字段、strsplit函数将学生的名和姓拆分
- Various uses of vim are very practical. I learned and summarized them in my work
猜你喜欢

Some opinions and code implementation of Siou loss: more powerful learning for bounding box regression zhora gevorgyan
In my limited software testing experience, a full-time summary of automation testing experience

About how to install mysql8.0 on the cloud server (Tencent cloud here) and enable local remote connection

. Net Maui performance improvement
【系统设计】指标监控和告警系统
How to add aplayer music player in blog
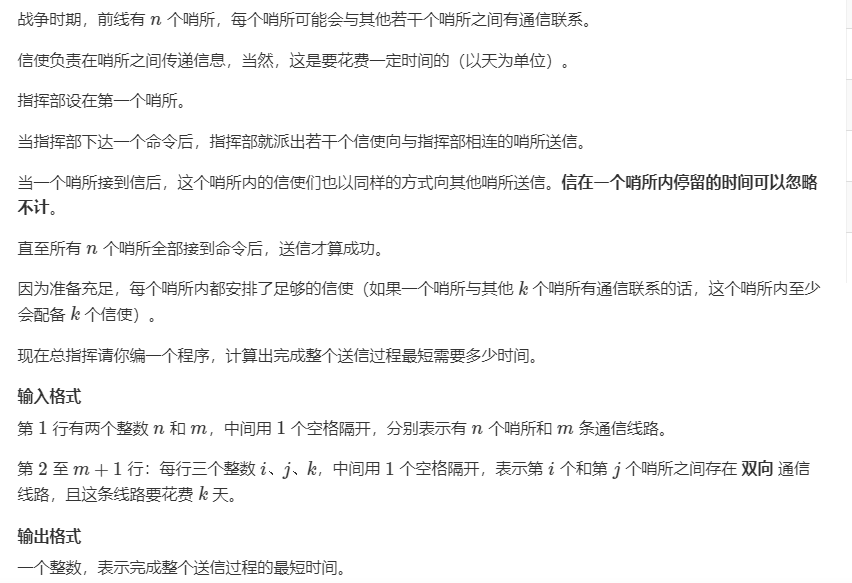
【最短路】Acwing1128信使:floyd最短路
Suggestions on one-stop development of testing life
禁锢自己的因素,原来有这么多
一起探索云服务之云数据库
随机推荐
STM32F1与STM32CubeIDE编程实例-315M超再生无线遥控模块驱动
竟然有一半的人不知道 for 与 foreach 的区别???
The Oracle message permission under the local Navicat connection liunx is insufficient
Talk about SOC startup (11) kernel initialization
R语言使用magick包的image_mosaic函数和image_flatten函数把多张图片堆叠在一起形成堆叠组合图像(Stack layers on top of each other)
Talk about SOC startup (x) kernel startup pilot knowledge
Software design - "high cohesion and low coupling"
基于华为云IOT设计智能称重系统(STM32)
The database synchronization tool dbsync adds support for mongodb and es
TDengine 社区问题双周精选 | 第二期
【系统设计】指标监控和告警系统
聊聊SOC启动(十) 内核启动先导知识
The annual salary of general test is 15W, and the annual salary of test and development is 30w+. What is the difference between the two?
Flet教程之 15 GridView 基础入门(教程含源码)
深度学习秋招面试题集锦(一)
How to write test cases for test coupons?
How much do you know about excel formula?
‘module‘ object is not callable错误
正在運行的Kubernetes集群想要調整Pod的網段地址
QT implements the delete method of the container