当前位置:网站首页>Recoverable fuse characteristic test
Recoverable fuse characteristic test
2022-07-06 00:46:00 【Zhuoqing】
§01 can Restore the fuse
One 、 Background introduction
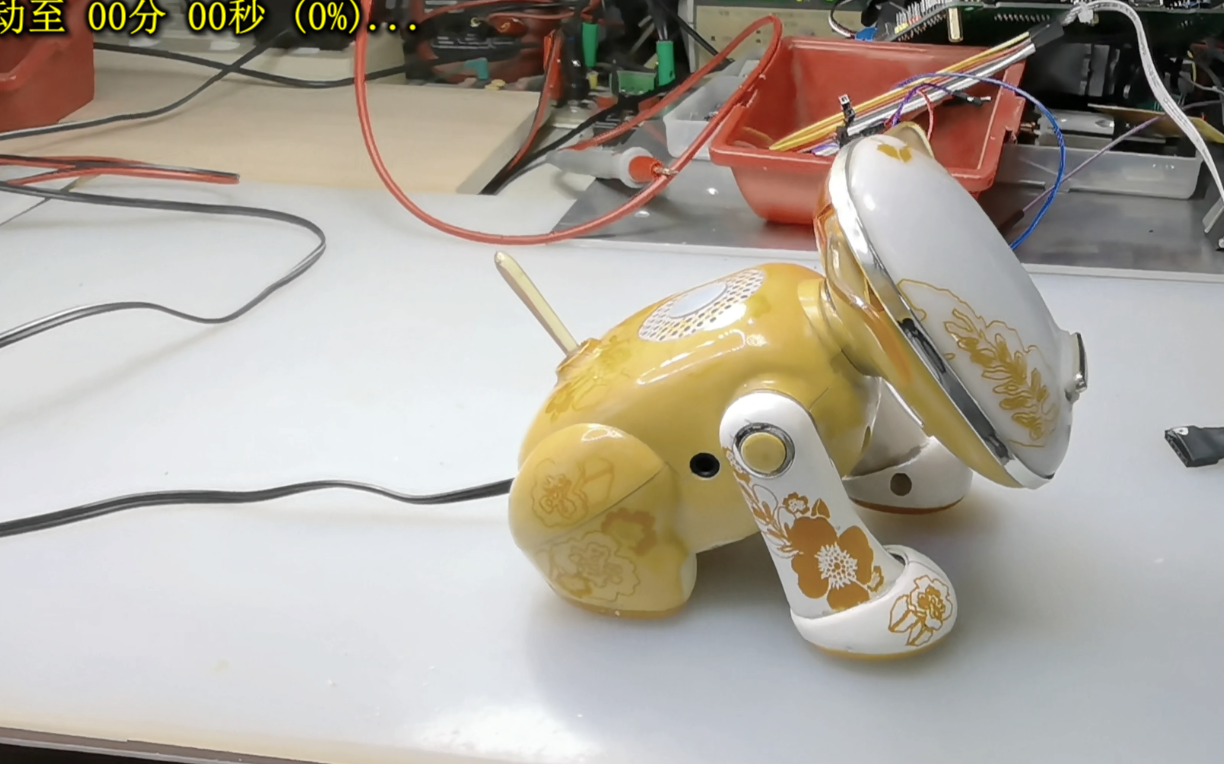
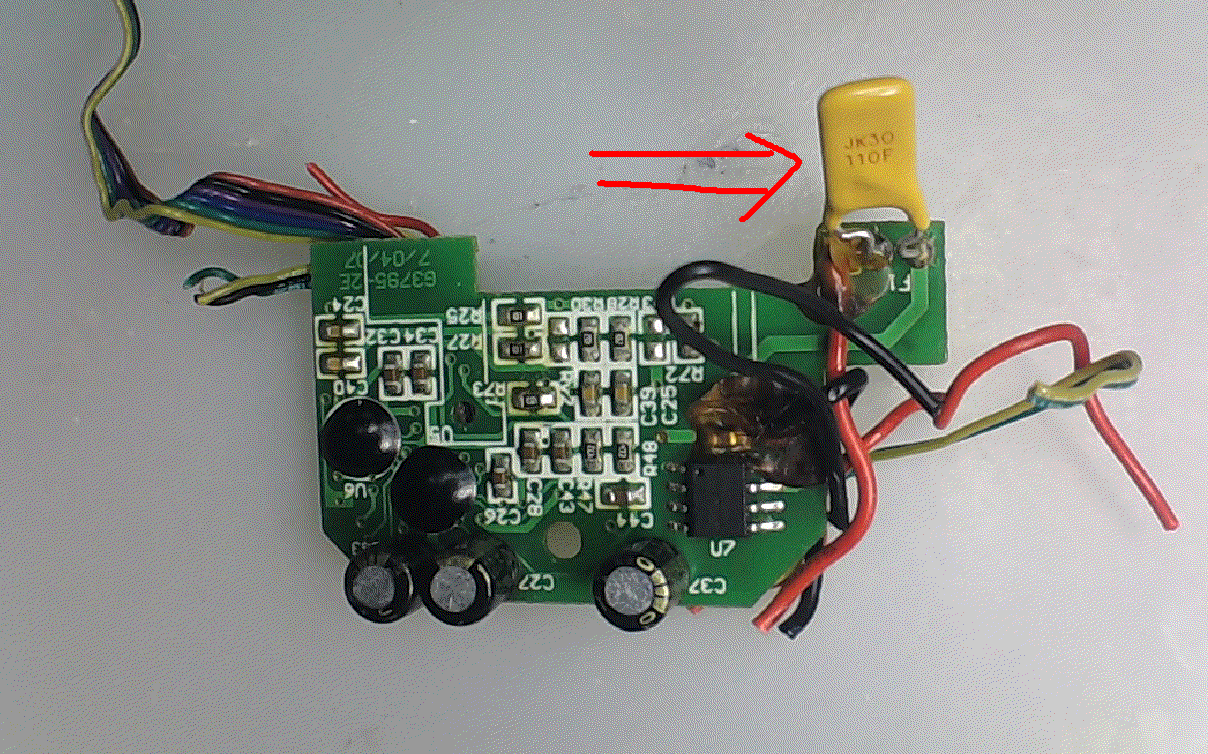
Last time I disassembled an electronic pet dog , On its internal circuit board See a relatively large recoverable fuse . This kind of device is used in limiting circuit overcurrent protection . Compared with other kinds of current fuses , It can recover by itself It brings great convenience to the application .
 |
|
Two 、 Recoverable fuse principle
Inside the recoverable fuse , There is a special layer of matter . It contains conductive carbon particles , Embedded in organic plastic . At normal temperature , These conductive particles are in contact with each other , The whole device is in a conductive low resistance state . As the temperature goes up , Organic plastic expands and deforms , Destroyed the internal structure , Carbon particles do not touch each other , The device is in a high resistance state . When the temperature drops , The organic plastic is restored to its original state , Carbon particles re contact , The device returns to a low resistance conductive state . This is the basic principle of recoverable fuse .
3、 ... and 、 Characteristic analysis
according to PTC The working principle can be known , Compared with ordinary fuses , Its conductivity depends on carbon particles , Therefore, the relative on resistance is relatively large . During overcurrent protection , It does not completely block the current , Just limit the current to a relatively small range . So this kind of fuse is suitable for some In electronic products with low working current .
Four 、 Performance measurement
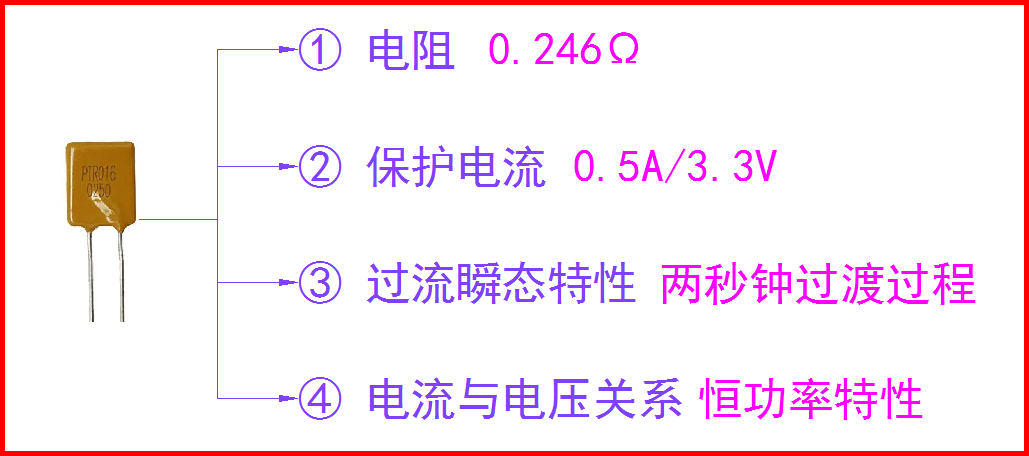
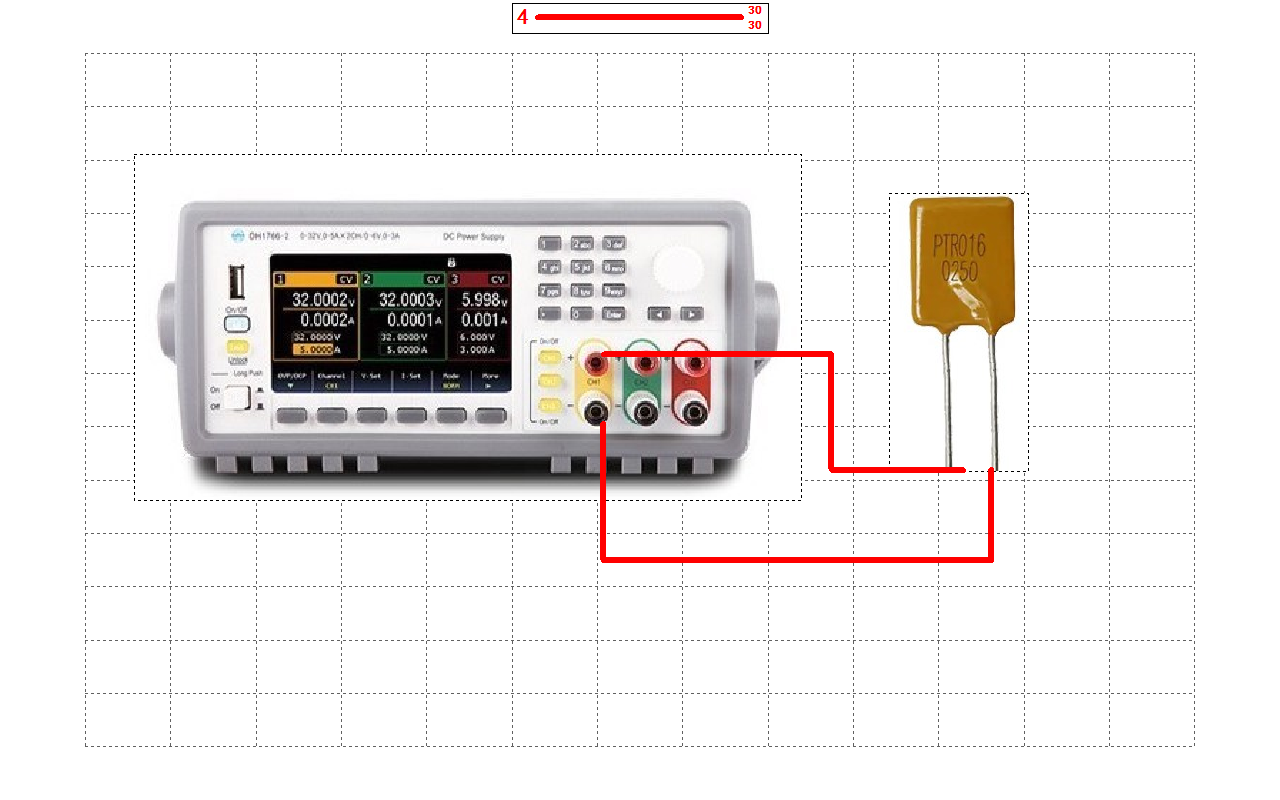
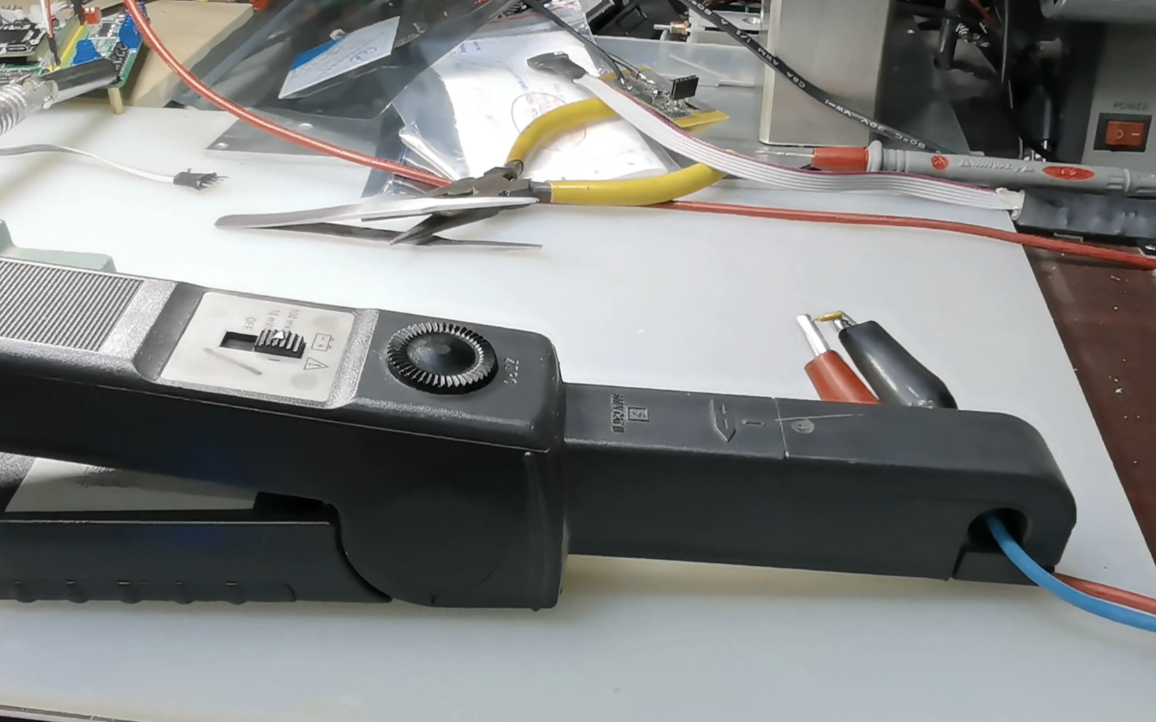
Here is the one at hand PTC Conduct characteristic measurement . The first step is to measure its resistance , The second step is to measure its protection current , The third step is to measure its overcurrent transient characteristics , Finally, measure the relationship between its protection current and working voltage .

Use SmartTweezer, measurement PTC The resistance of the two pins , The resistance value is : 246mΩ.
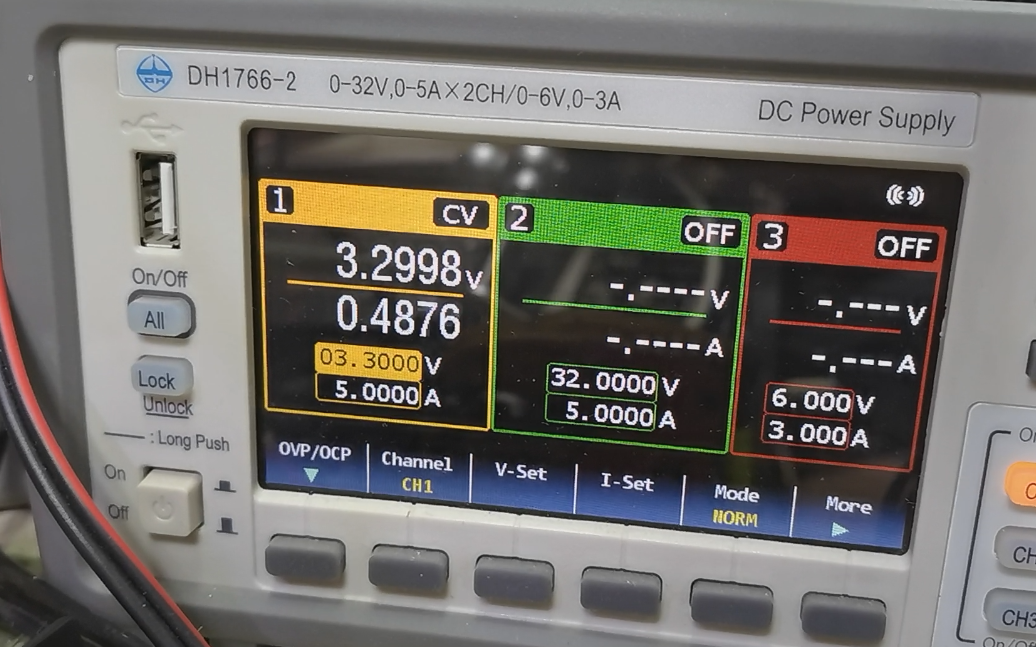
Using programmable power DH1766, measurement PTR Protection current , The output voltage is 3.3V, It can be seen that the corresponding output current is 0.488A. You can see this recoverable insurance at hand The protection current is 0.5A, The power consumption is about 1.65W.
Use Hall current sensor to detect the protection short-circuit current . The hall sensor range is set to 100mV/A. stay PTC To impose on 3.3V, This is the current change . from 1 Power up in seconds ; In the following 2 The current is at 5A Saturation state . This is a DH1766 Output current limiting . Then the current began to drop sharply . Finally, it stabilized at 0.5A about . so PTC The current limiting speed is relatively slow . It takes about two seconds to limit the current to 0.5A.
It's tested here PTC The dynamic characteristics of , It takes two seconds for the transition process to limit the current . Finally, measure PTC The relationship between applied voltage and current . The measurement method is relatively simple , utilize DH1766 Output different voltages , Measure the final output current limit .
The output voltage is from 2V, Change to 6V, This is the measured voltage and current curve . You can see that as the voltage increases , The smaller the current limiting current . Consumed in PTC The power on the remains approximately constant . This is calculated by current and voltage PTC Power consumption on . It can be seen that it is generally maintained at 1.5W about .
about PTC The relationship between voltage and current limiting , Generally, there is a constant power relationship . The higher the working voltage , The smaller the current limit is .
※ total junction ※
this The characteristics of commonly used recoverable fuses are measured , Master its characteristics , It is very important for correct application .
- Measure OUTV,OUTI

from headm import *
from tsmodule.tsvisa import *
from tsmodule.tsstm32 import *
idim = []
for i in range(200):
meter = meterval()
printf(meter)
idim.append(meter[0] * 10)
time.sleep(0.1)
t = arange(200) * 0.1
plt.plot(t, idim)
plt.xlabel("Time(s)")
plt.ylabel("Current(A)")
plt.grid(True)
plt.tight_layout()
plt.show()
边栏推荐
- VSphere implements virtual machine migration
- Spark SQL空值Null,NaN判断和处理
- SAP Spartacus home 页面读取 product 数据的请求的 population 逻辑
- Spark DF增加一列
- Cloud guide DNS, knowledge popularization and classroom notes
- Classic CTF topic about FTP protocol
- Leetcode Fibonacci sequence
- 看抖音直播Beyond演唱会有感
- Go learning --- read INI file
- Dynamic programming -- linear DP
猜你喜欢
![[groovy] XML serialization (use markupbuilder to generate XML data | create sub tags under tag closures | use markupbuilderhelper to add XML comments)](/img/d4/4a33e7f077db4d135c8f38d4af57fa.jpg)
[groovy] XML serialization (use markupbuilder to generate XML data | create sub tags under tag closures | use markupbuilderhelper to add XML comments)
![[groovy] compile time metaprogramming (compile time method injection | method injection using buildfromspec, buildfromstring, buildfromcode)](/img/e4/a41fe26efe389351780b322917d721.jpg)
[groovy] compile time metaprogramming (compile time method injection | method injection using buildfromspec, buildfromstring, buildfromcode)
After Luke zettlemoyer, head of meta AI Seattle research | trillion parameters, will the large model continue to grow?
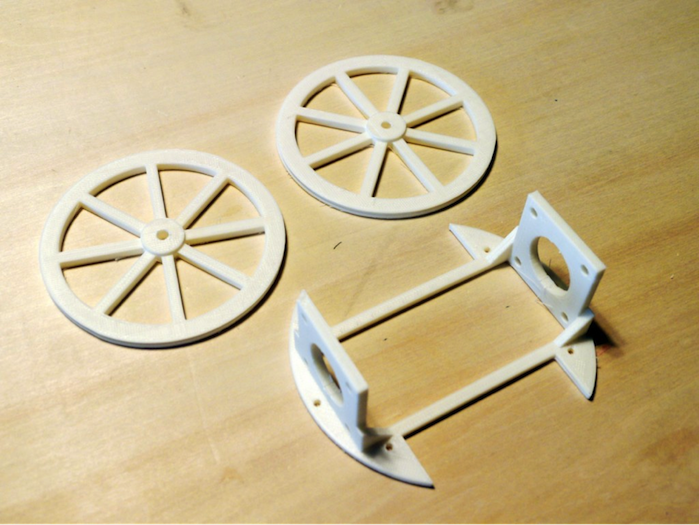
How to make your own robot
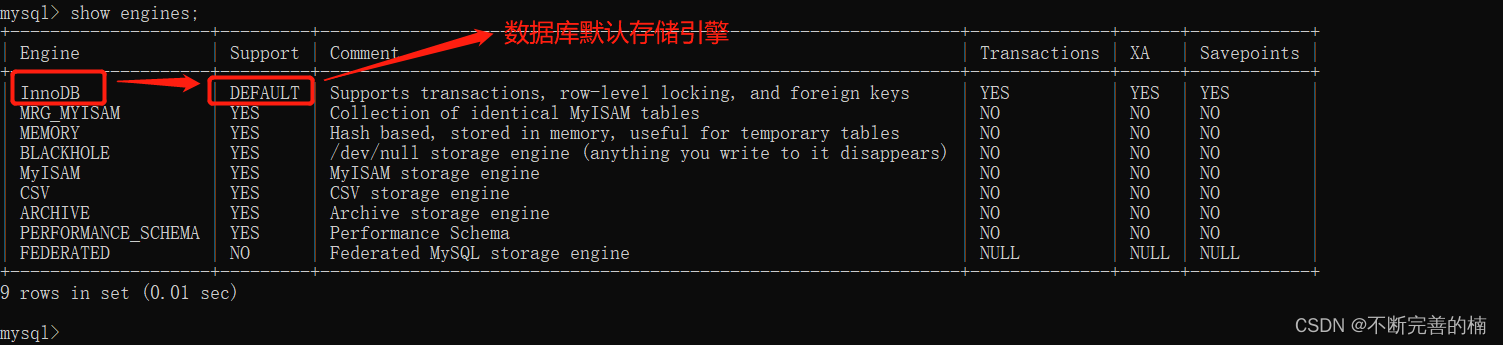
MySQL存储引擎
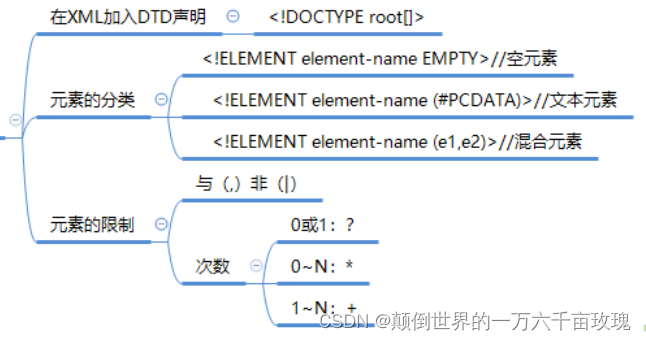
XML Configuration File
The relationship between FPGA internal hardware structure and code

Analysis of the combination of small program technology advantages and industrial Internet
Opencv classic 100 questions
Set data real-time update during MDK debug
随机推荐
The relationship between FPGA internal hardware structure and code
Yolov5, pychar, Anaconda environment installation
多线程与高并发(8)—— 从CountDownLatch总结AQS共享锁(三周年打卡)
SAP Spartacus home 页面读取 product 数据的请求的 population 逻辑
Go learning - dependency injection
《强化学习周刊》第52期:Depth-CUPRL、DistSPECTRL & Double Deep Q-Network
Notepad++ regular expression replacement string
数据分析思维分析方法和业务知识——分析方法(三)
XML配置文件
NLP basic task word segmentation third party Library: ICTCLAS [the third party library with the highest accuracy of Chinese word segmentation] [Chinese Academy of Sciences] [charge]
[groovy] compile time metaprogramming (compile time method interception | find the method to be intercepted in the myasttransformation visit method)
Cve-2017-11882 reappearance
Basic introduction and source code analysis of webrtc threads
STM32 key chattering elimination - entry state machine thinking
可恢复保险丝特性测试
Idea remotely submits spark tasks to the yarn cluster
如何利用Flutter框架开发运行小程序
Date类中日期转成指定字符串出现的问题及解决方法
How to use the flutter framework to develop and run small programs
Opencv classic 100 questions