当前位置:网站首页>Data analysis from the perspective of control theory
Data analysis from the perspective of control theory
2022-07-07 02:53:00 【Jade Wind chant】
Data analysis from the perspective of control theory
As the title , Talk about my cognition of mathematical and physical models . This article is also for 1024 medal , An article deliberately rushed , No manuscript saved , Just briefly express your ideas . If you have any questions, welcome to exchange and discuss .
My professional direction and control are inseparable , After junior year , Learn modern control theory 、 Testing Technology 、 After the principle of computer control , I really realized that the mathematical model should be raised to a dynamic system . Data analysis is actually the estimation of system state . This is the new understanding I have had during this period of time .
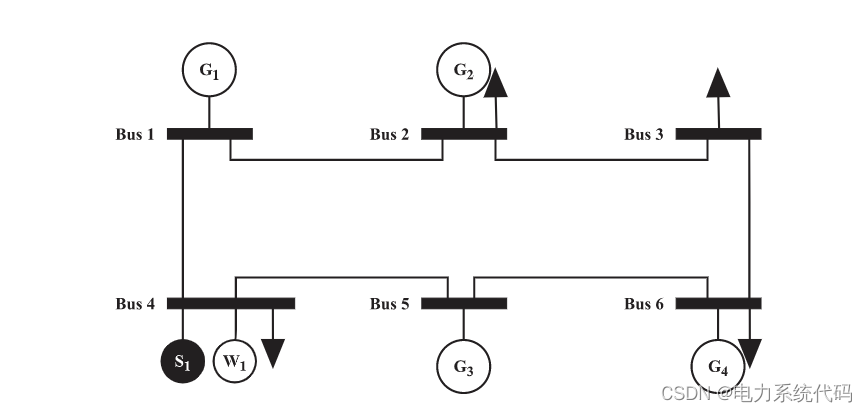
When doing robot control , There will inevitably be a problem —— Navigation . Then what is navigation ? The task of navigation covers three parts :
- I ( robot ) Where is the ?
- I ( robot ) Where are you going? ?
- I ( robot ) How to get there ?
Our work revolves around these three issues . First, the first question , location . How can we achieve positioning —— Where is the robot ?
The positioning of robot is based on its perception . Perception comes from detectors , It usually includes optical sensors such as cameras 、 Laser radar 、 Ultrasonic ranging and so on . I temporarily call the data obtained by these sensors observation data . You've seen me Statistical pattern recognition series learning notes My friends must know Bayesian prior distribution and posterior distribution . That is, how to get the current posture of the robot in the world coordinate system from the observation data ? Now I quote directly from my Statistical pattern recognition learning notes ( Two ) In the words of .
How do we observe data x x x To estimate the current state of the robot ?
In short , We hope that through the observation data x x x To infer the state ( And their probability distributions ). therefore , We say the estimation of robot state , Is known observation data x x x Under the condition of , Calculate the conditional probability distribution of the state :
p ( ϖ i ∣ x ) p(\varpi_i|x) p(ϖi∣x)
In order to have a better connection with the previous article , The expression used is ϖ i \varpi_i ϖi and x x x . And the above formula is also called Posterior probability . Using Bayesian formula , A posteriori probability can also be expressed as :
p ( ϖ i ∣ x ) = p ( x ∣ ϖ i ) p ( ϖ i ) p ( x ) p(\varpi_i|x)=\frac{p(x|\varpi_i)p(\varpi_i)}{p(x)} p(ϖi∣x)=p(x)p(x∣ϖi)p(ϖi)
p ( x ∣ ϖ i ) p(x|\varpi_i) p(x∣ϖi) It's called likelihood , p ( ϖ i ) p(\varpi_i) p(ϖi) It's called a priori . Solving the maximum a posteriori probability is equivalent to the product of maximum likelihood and a priori .
The significance of a priori probability and a posteriori probability is discussed too much in the notes , No more details here . actually , If state estimation is strongly combined with classification problems , Then each state corresponds to a category . This is the source of my inspiration .
In the chapter of modern control theory about system controllability and observability , There is a sentence that inspires me a lot ,“ Input affects the internal state quantity of the system , The state quantity determines the output of the system .”
In computer control theory , We often study discrete systems . Because computers process digital signals , It is discrete in time and amplitude . We know that the physical meaning of differential equations is actually the law of motion of the system . Differential equations are mathematical models of continuous signals , The difference equation is the mathematical model of discrete signal . Discrete signals can be sampled from continuous systems , Problems related to sampling points , I can easily rise to the application problem . For example, a small shop needs to purchase goods every month , Input is the purchase quantity , Output is profit . And user preferences , Regional factors are often intermediate variables in this input and output process . I try to find a way to describe quantitatively , Although there is no further study this week , But I believe this problem can be solved next Monday and Tuesday .
I am now , Yes 、 Complex domain 、 frequency domain 、 State space has a new understanding , I believe my control system will go a long way . Thank you for meeting these lovely teachers this semester , I also found that my efforts gradually began to pay off .
边栏推荐
- Convert widerperson dataset to Yolo format
- MySQL
- wireshark安装
- 2022 spring recruitment begins, and a collection of 10000 word interview questions will help you
- 写作系列之contribution
- Common fitting models and application methods of PCL
- Unity webgl adaptive web page size
- 进程管理基础
- What are the characteristics of the operation and maintenance management system
- 数论 --- 快速幂、快速幂求逆元
猜你喜欢
Matlb| economic scheduling with energy storage, opportunity constraints and robust optimization
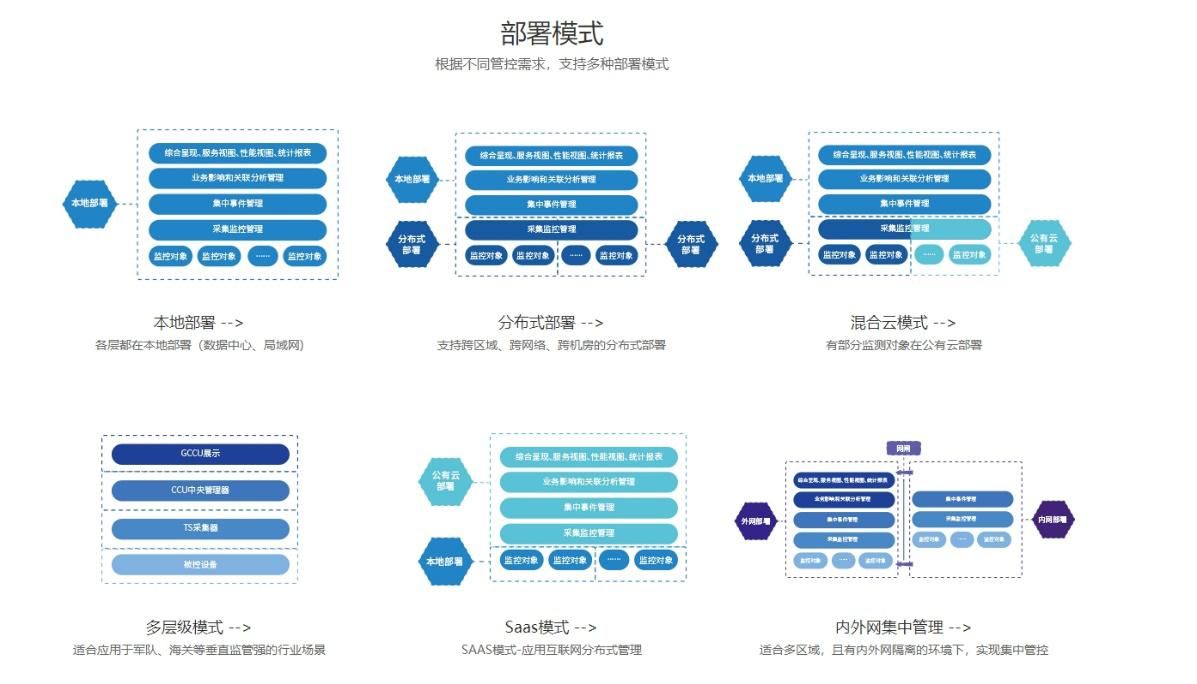
运维管理系统有哪些特色
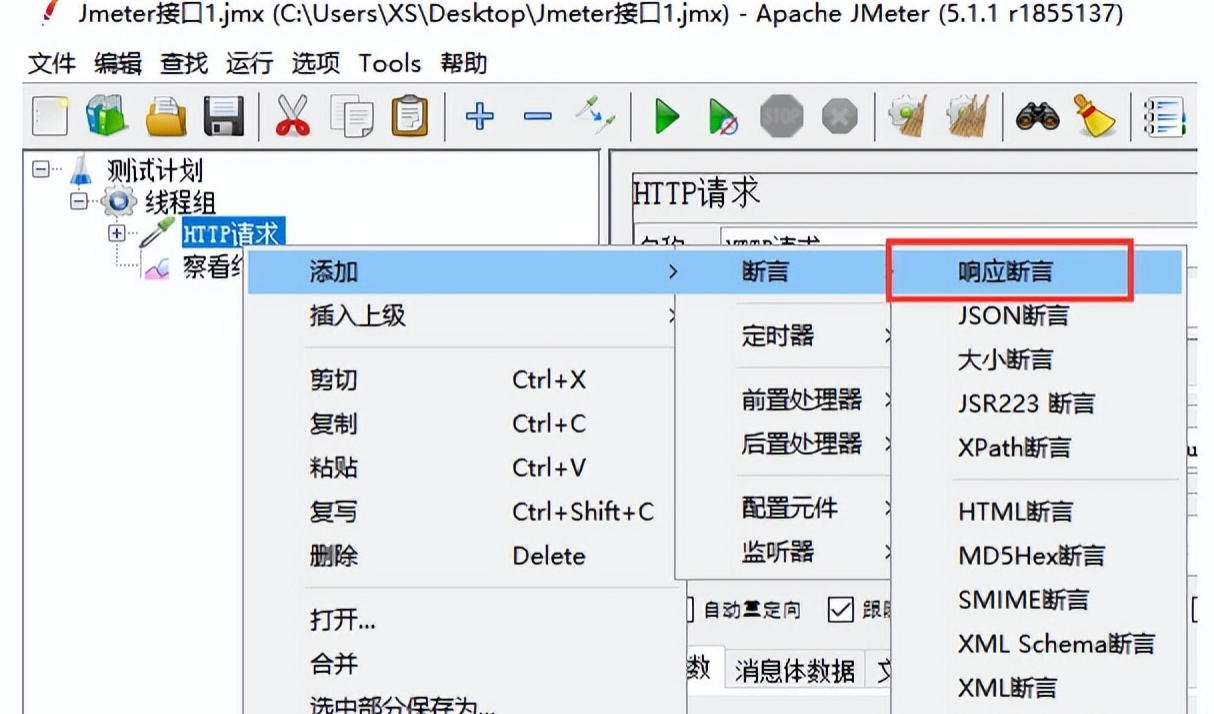
软件测试——Jmeter接口测试之常用断言
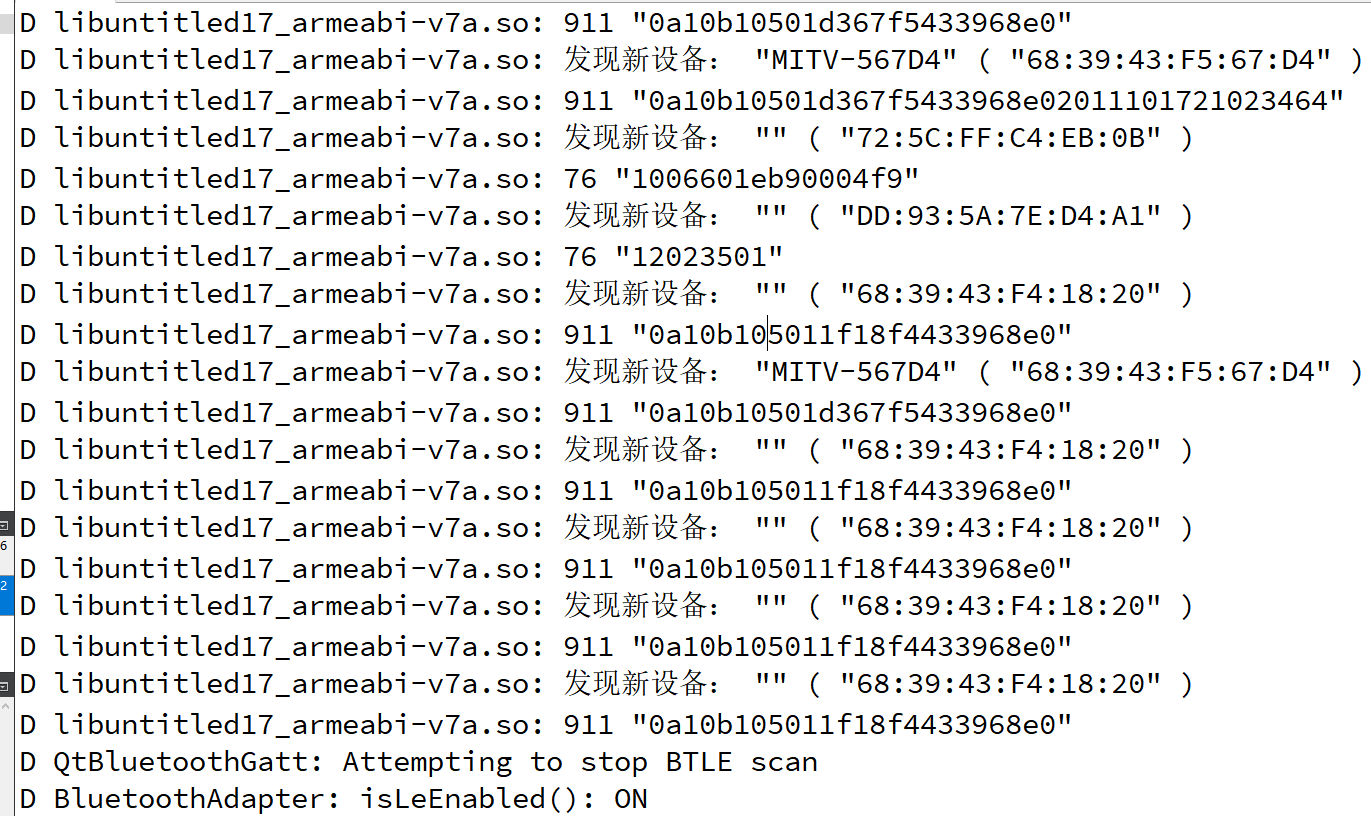
Qt蓝牙:QBluetoothDeviceInfo
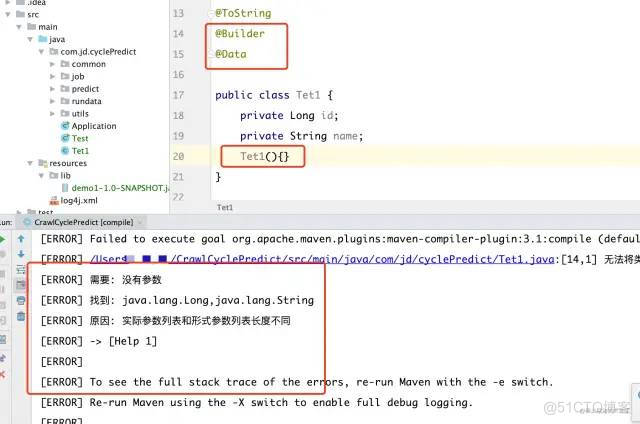
Lombok makes the pit of ⽤ @data and @builder at the same time
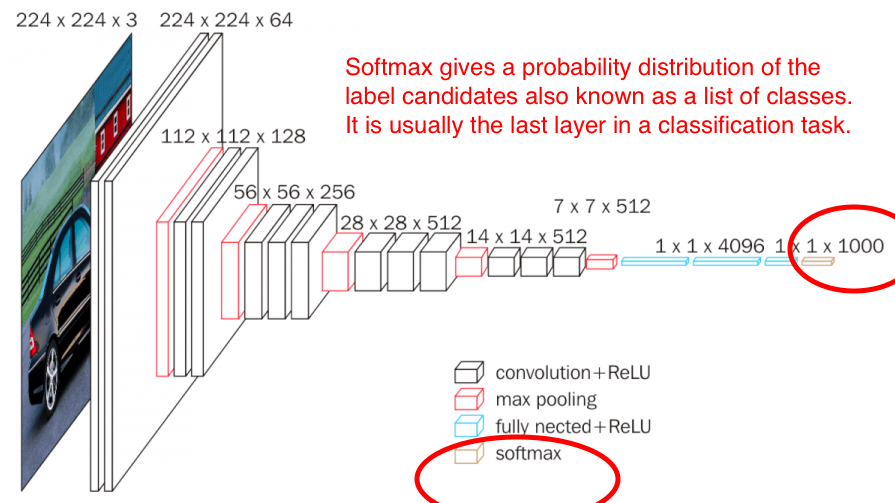
用全连接+softmax对图片的feature进行分类
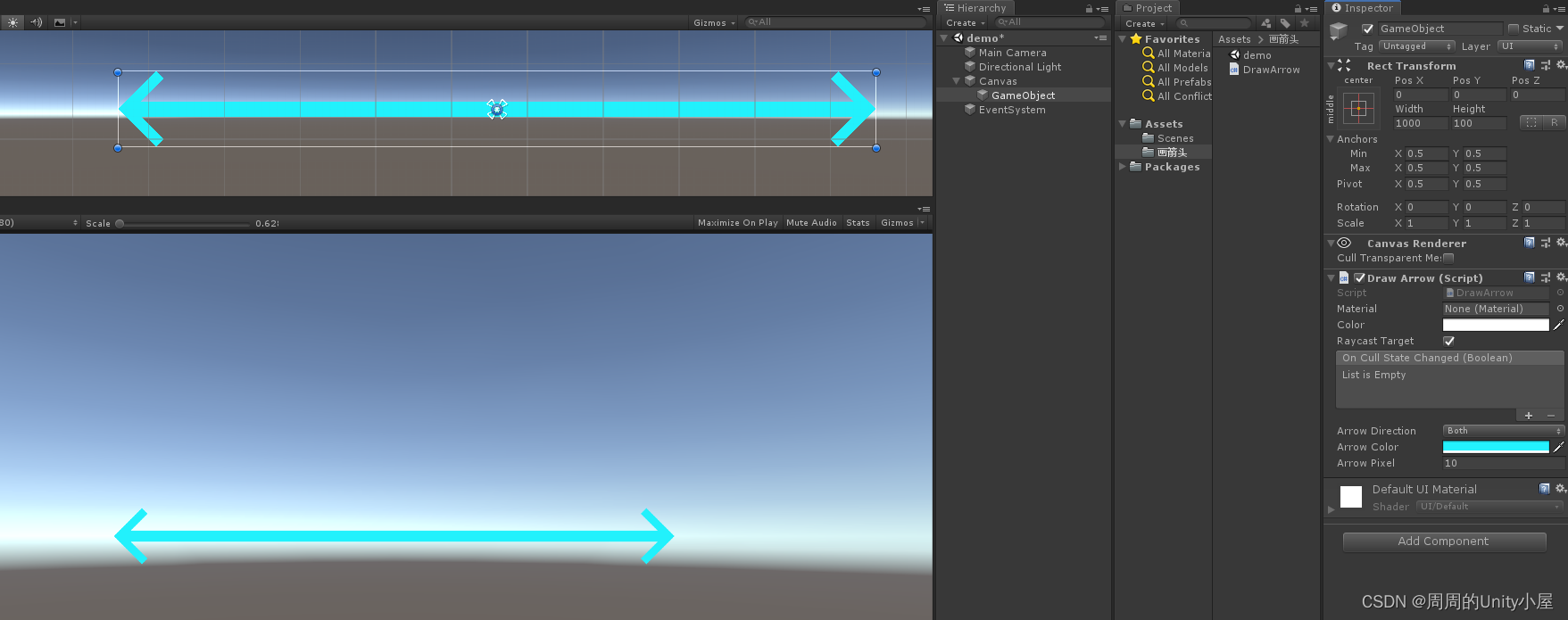
Unity使用MaskableGraphic画一条带箭头的线
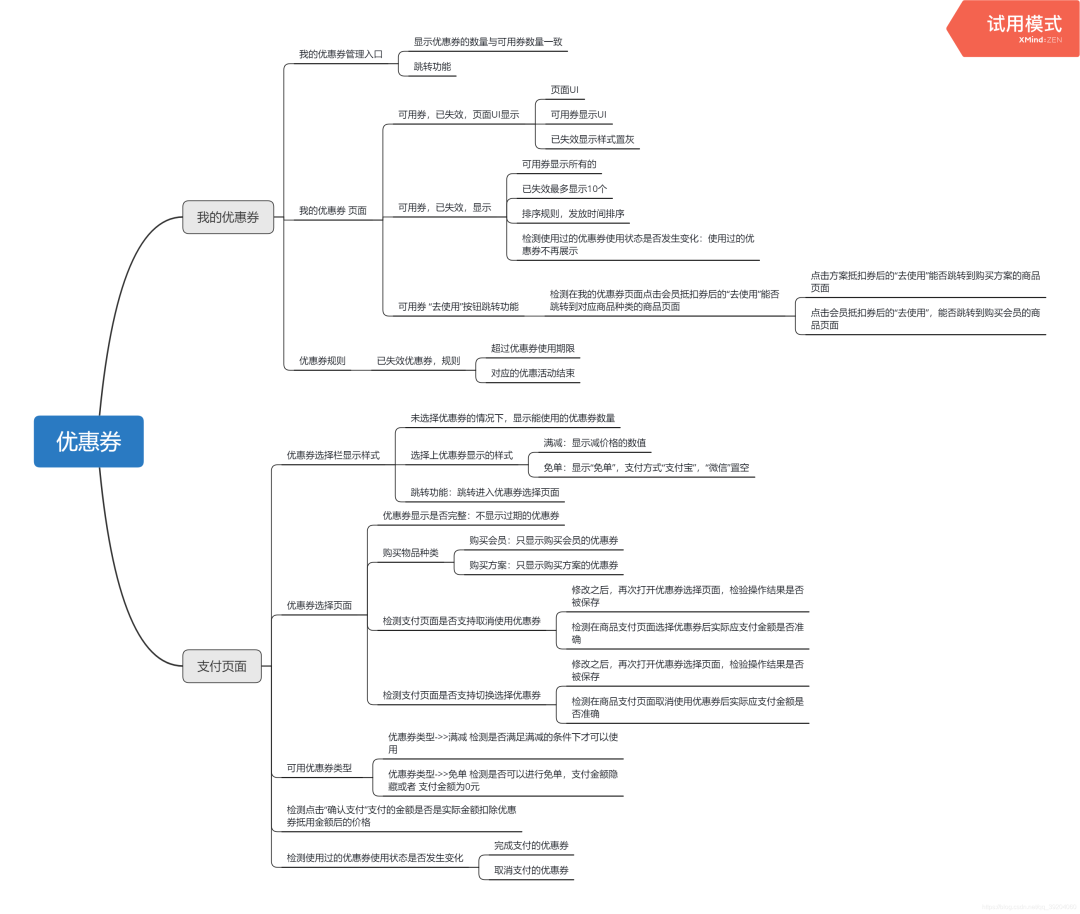
测试优惠券要怎么写测试用例?

Digital scrolling increases effect
LeetCode 77:组合
随机推荐
MMDetection3D加载毫米波雷达数据
Planning and design of double click hot standby layer 2 network based on ENSP firewall
Huitong programming introductory course - 2A breakthrough
fasterxml ToStringSerializerBase报错
A complete tutorial for getting started with redis: problem location and optimization
2022 spring recruitment begins, and a collection of 10000 word interview questions will help you
Code line breaking problem of untiy text box
KYSL 海康摄像头 8247 h9 isapi测试
What are the characteristics of the operation and maintenance management system
6-6 vulnerability exploitation SSH security defense
Qpushbutton- "function refinement"
记一次JAP查询导致OOM的问题分析
Unity使用MaskableGraphic画一条带箭头的线
[leetcode]Search for a Range
Here comes a white paper to uncover the technology behind Clickhouse, a node with 10000 bytes!
CDB PDB user rights management
MetaForce原力元宇宙佛萨奇2.0智能合约系统开发(源码部署)
巴比特 | 元宇宙每日必读:IP授权是NFT的破圈之路吗?它的难点在哪里?Holder该如何选择合作平台?...
Apifox, is your API interface document rolled up like this?
Andrews - multimedia programming