当前位置:网站首页>GTSAM中ISAM2和IncrementalFixedLagSmoother说明
GTSAM中ISAM2和IncrementalFixedLagSmoother说明
2022-07-06 05:58:00 【瞻邈】
1. 参数
1.1. 配置参数ISAM2Params
struct ISAM2Params {
typedef boost::variant<ISAM2GaussNewtonParams, ISAM2DoglegParams>
OptimizationParams; ///< Either ISAM2GaussNewtonParams or
///< ISAM2DoglegParams
typedef boost::variant<double, FastMap<char, Vector> >
RelinearizationThreshold; ///< Either a constant relinearization
///< threshold or a per-variable-type set of
///< thresholds
/** Optimization parameters, this both selects the nonlinear optimization
* method and specifies its parameters, either ISAM2GaussNewtonParams or
* ISAM2DoglegParams. In the former, Gauss-Newton optimization will be used
* with the specified parameters, and in the latter Powell's dog-leg
* algorithm will be used with the specified parameters.
*/
OptimizationParams optimizationParams;
/** Only relinearize variables whose linear delta magnitude is greater than
* this threshold (default: 0.1). If this is a FastMap<char,Vector> instead
* of a double, then the threshold is specified for each dimension of each
* variable type. This parameter then maps from a character indicating the
* variable type to a Vector of thresholds for each dimension of that
* variable. For example, if Pose keys are of type TypedSymbol<'x',Pose3>,
* and landmark keys are of type TypedSymbol<'l',Point3>, then appropriate
* entries would be added with:
* \code
FastMap<char,Vector> thresholds;
thresholds['x'] = (Vector(6) << 0.1, 0.1, 0.1, 0.5, 0.5, 0.5).finished();
// 0.1 rad rotation threshold, 0.5 m translation threshold thresholds['l'] =
Vector3(1.0, 1.0, 1.0); // 1.0 m landmark position threshold
params.relinearizeThreshold = thresholds;
\endcode
*/
RelinearizationThreshold relinearizeThreshold;
int relinearizeSkip; ///< Only relinearize any variables every
///< relinearizeSkip calls to ISAM2::update (default:
///< 10)
bool enableRelinearization; ///< Controls whether ISAM2 will ever relinearize
///< any variables (default: true)
bool evaluateNonlinearError; ///< Whether to evaluate the nonlinear error
///< before and after the update, to return in
///< ISAM2Result from update()
enum Factorization { CHOLESKY, QR };
/** Specifies whether to use QR or CHOESKY numerical factorization (default:
* CHOLESKY). Cholesky is faster but potentially numerically unstable for
* poorly-conditioned problems, which can occur when uncertainty is very low
* in some variables (or dimensions of variables) and very high in others. QR
* is slower but more numerically stable in poorly-conditioned problems. We
* suggest using the default of Cholesky unless gtsam sometimes throws
* IndefiniteLinearSystemException when your problem's Hessian is actually
* positive definite. For positive definite problems, numerical error
* accumulation can cause the problem to become numerically negative or
* indefinite as solving proceeds, especially when using Cholesky.
*/
Factorization factorization;
/** Whether to cache linear factors (default: true).
* This can improve performance if linearization is expensive, but can hurt
* performance if linearization is very cleap due to computation to look up
* additional keys.
*/
bool cacheLinearizedFactors;
KeyFormatter
keyFormatter; ///< A KeyFormatter for when keys are printed during
///< debugging (default: DefaultKeyFormatter)
bool enableDetailedResults; ///< Whether to compute and return
///< ISAM2Result::detailedResults, this can
///< increase running time (default: false)
/** Check variables for relinearization in tree-order, stopping the check once
* a variable does not need to be relinearized (default: false). This can
* improve speed by only checking a small part of the top of the tree.
* However, variables below the check cut-off can accumulate significant
* deltas without triggering relinearization. This is particularly useful in
* exploration scenarios where real-time performance is desired over
* correctness. Use with caution.
*/
bool enablePartialRelinearizationCheck;
/// When you will be removing many factors, e.g. when using ISAM2 as a
/// fixed-lag smoother, enable this option to add factors in the first
/// available factor slots, to avoid accumulating nullptr factor slots, at the
/// cost of having to search for slots every time a factor is added.
bool findUnusedFactorSlots;
};1.2. 更新参数ISAM2UpdateParams
struct ISAM2UpdateParams {
ISAM2UpdateParams() = default;
/** Indices of factors to remove from system (default: empty) */
FactorIndices removeFactorIndices;
/** An optional map of keys to group labels, such that a variable can be
* constrained to a particular grouping in the BayesTree */
boost::optional<FastMap<Key, int>> constrainedKeys{boost::none};
/** An optional set of nonlinear keys that iSAM2 will hold at a constant
* linearization point, regardless of the size of the linear delta */
boost::optional<FastList<Key>> noRelinKeys{boost::none};
/** An optional set of nonlinear keys that iSAM2 will re-eliminate, regardless
* of the size of the linear delta. This allows the provided keys to be
* reordered. */
boost::optional<FastList<Key>> extraReelimKeys{boost::none};
/** Relinearize any variables whose delta magnitude is sufficiently large
* (Params::relinearizeThreshold), regardless of the relinearization
* interval (Params::relinearizeSkip). */
bool force_relinearize{false};
/** An optional set of new Keys that are now affected by factors,
* indexed by factor indices (as returned by ISAM2::update()).
* Use when working with smart factors. For example:
* - Timestamp `i`: ISAM2::update() called with a new smart factor depending
* on Keys `X(0)` and `X(1)`. It returns that the factor index for the new
* smart factor (inside ISAM2) is `13`.
* - Timestamp `i+1`: The same smart factor has been augmented to now also
* depend on Keys `X(2)`, `X(3)`. Next call to ISAM2::update() must include
* its `newAffectedKeys` field with the map `13 -> {X(2), X(3)}`.
*/
boost::optional<FastMap<FactorIndex, KeySet>> newAffectedKeys{boost::none};
/** By default, iSAM2 uses a wildfire update scheme that stops updating when
* the deltas become too small down in the tree. This flagg forces a full
* solve instead. */
bool forceFullSolve{false};
};1.3. 返回参数ISAM2Result
/**
* @addtogroup ISAM2
* This struct is returned from ISAM2::update() and contains information about
* the update that is useful for determining whether the solution is
* converging, and about how much work was required for the update. See member
* variables for details and information about each entry.
*/
struct ISAM2Result {
/** The nonlinear error of all of the factors, \a including new factors and
* variables added during the current call to ISAM2::update(). This error is
* calculated using the following variable values:
* \li Pre-existing variables will be evaluated by combining their
* linearization point before this call to update, with their partial linear
* delta, as computed by ISAM2::calculateEstimate().
* \li New variables will be evaluated at their initialization points passed
* into the current call to update.
* \par Note: This will only be computed if
* ISAM2Params::evaluateNonlinearError is set to \c true, because there is
* some cost to this computation.
*/
boost::optional<double> errorBefore;
/** The nonlinear error of all of the factors computed after the current
* update, meaning that variables above the relinearization threshold
* (ISAM2Params::relinearizeThreshold) have been relinearized and new
* variables have undergone one linear update. Variable values are
* again computed by combining their linearization points with their
* partial linear deltas, by ISAM2::calculateEstimate().
* \par Note: This will only be computed if
* ISAM2Params::evaluateNonlinearError is set to \c true, because there is
* some cost to this computation.
*/
boost::optional<double> errorAfter;
/** The number of variables that were relinearized because their linear
* deltas exceeded the reslinearization threshold
* (ISAM2Params::relinearizeThreshold), combined with any additional
* variables that had to be relinearized because they were involved in
* the same factor as a variable above the relinearization threshold.
* On steps where no relinearization is considered
* (see ISAM2Params::relinearizeSkip), this count will be zero.
*/
size_t variablesRelinearized;
/** The number of variables that were reeliminated as parts of the Bayes'
* Tree were recalculated, due to new factors. When loop closures occur,
* this count will be large as the new loop-closing factors will tend to
* involve variables far away from the root, and everything up to the root
* will be reeliminated.
*/
size_t variablesReeliminated;
/** The number of factors that were included in reelimination of the Bayes'
* tree. */
size_t factorsRecalculated;
/** The number of cliques in the Bayes' Tree */
size_t cliques;
/** The indices of the newly-added factors, in 1-to-1 correspondence with the
* factors passed as \c newFactors to ISAM2::update(). These indices may be
* used later to refer to the factors in order to remove them.
*/
FactorIndices newFactorsIndices;
/** Unused keys, and indices for unused keys,
* i.e., keys that are empty now and do not appear in the new factors.
*/
KeySet unusedKeys;
/** keys for variables that were observed, i.e., not unused. */
KeyVector observedKeys;
/** Keys of variables that had factors removed. */
KeySet keysWithRemovedFactors;
/** All keys that were marked during the update process. */
KeySet markedKeys;
}2. 函数说明
2.1. ISAM2::marginalizeLeaves
Marginalize out variables listed in leafKeys. These keys must be leaves in the BayesTree. Throws MarginalizeNonleaf Exception if non-leaves are requested to be marginalized. Marginalization leaves a linear approximation of the marginal in the system, and the linearization points of any variables involved in this linear marginal become fixed. The set fixed variables will include any key involved with the marginalized variables in the original factors, and possibly additional ones due to fill-in.
If provided, 'marginalFactorsIndices' will be augmented with the factor graph indices of the marginal factors added during the 'marginalizeLeaves' call
If provided, 'deletedFactorsIndices' will be augmented with the factor graph indices of any factor that was removed during the 'marginalizeLeaves'
2.2. ISAM2::recalculateIncremental
2.3. ISAM2::recalculateBatch
2.4. recursiveMarkAffectedKeys
在IncrementalFixedLagSmoother.cpp这个文件中,但并不是成员函数。
用于标记一个key的子树
2.5. IncrementalFixedLagSmoother::update
2.6. ISAM2::update
2.7. BayesTree::removeSubtree
如果入参是根团,删除该团及其所有子孙团,在node_中也有删除
如果入参不是根节点,先把其父团与其的边删除
返回所有被删除的团
3. 成员变量说明
Values ISAM2::theta_
VectorValues ISAM2::delta_
VariableIndex ISAM2::variableIndex_
4. 辅助类
4.1. treeTraversalNode-inst.h
// Internal node used in DFS preorder stack
template<typename NODE, typename DATA>
struct TraversalNode {
bool expanded;
const boost::shared_ptr<NODE>& treeNode;
DATA& parentData;
typename FastList<DATA>::iterator dataPointer;
TraversalNode(const boost::shared_ptr<NODE>& _treeNode, DATA& _parentData) :
expanded(false), treeNode(_treeNode), parentData(_parentData) {
}
};4.2. EliminationTree.h
struct EliminationTree::Node {
typedef FastVector<sharedFactor> Factors;
typedef FastVector<boost::shared_ptr<Node> > Children;
Key key; ///< key associated with root
Factors factors; ///< factors associated with root
Children children; ///< sub-trees
sharedFactor eliminate(const boost::shared_ptr<BayesNetType>& output,
const Eliminate& function,
const FastVector<sharedFactor>& childrenFactors) const;
void print(const std::string& str, const KeyFormatter& keyFormatter) const;
};4.3. ClusterTree-inst.h
struct EliminationData {
// Typedefs
typedef typename CLUSTERTREE::sharedFactor sharedFactor;
typedef typename CLUSTERTREE::FactorType FactorType;
typedef typename CLUSTERTREE::FactorGraphType FactorGraphType;
typedef typename CLUSTERTREE::ConditionalType ConditionalType;
typedef typename CLUSTERTREE::BayesTreeType::Node BTNode;
// member variables
EliminationData* const parentData;
size_t myIndexInParent;
FastVector<sharedFactor> childFactors;
boost::shared_ptr<BTNode> bayesTreeNode;
// member functions
// Elimination pre-order visitor - creates the EliminationData structure for the visited node.
static EliminationData EliminationPreOrderVisitor(const typename CLUSTERTREE::sharedNode& node,
EliminationData& parentData) {
assert(node);
EliminationData myData(&parentData, node->nrChildren());
myData.bayesTreeNode->problemSize_ = node->problemSize();
return myData;
}
// ........
}4.4. VariableIndex
The VariableIndex class computes and stores the block column structure of a factor graph. The factor graph stores a collection of factors, each of which involves a set of variables. In contrast, the VariableIndex is built from a factor graph prior to elimination, and stores the list of factors that involve each variable. This information is stored as a deque of lists of factor indices.
最主要的成变量是FastMap<Key, FactorIndices> index_,用于存储key和因子的索引的对应关系边栏推荐
- 功能安全之故障(fault),错误(error),失效(failure)
- Investment strategy discussion and market scale prediction report of China's solid state high power amplifier industry from 2022 to 2028
- Software test interview questions - Test Type
- Configuring OSPF GR features for Huawei devices
- 【无标题】
- [web security] nodejs prototype chain pollution analysis
- Luogu p1460 [usaco2.1] healthy Holstein cows
- Novice entry SCM must understand those things
- J'ai un chaton.
- 如何在业务代码中使用 ThinkPHP5.1 封装的容器内反射方法
猜你喜欢
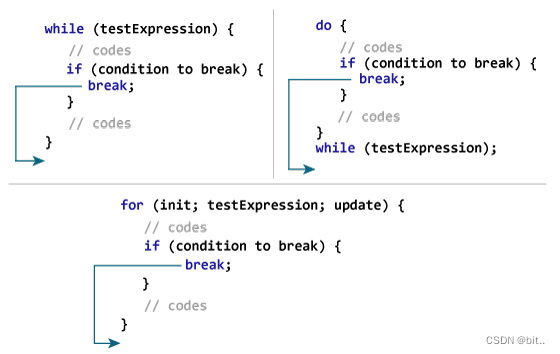
continue和break的区别与用法
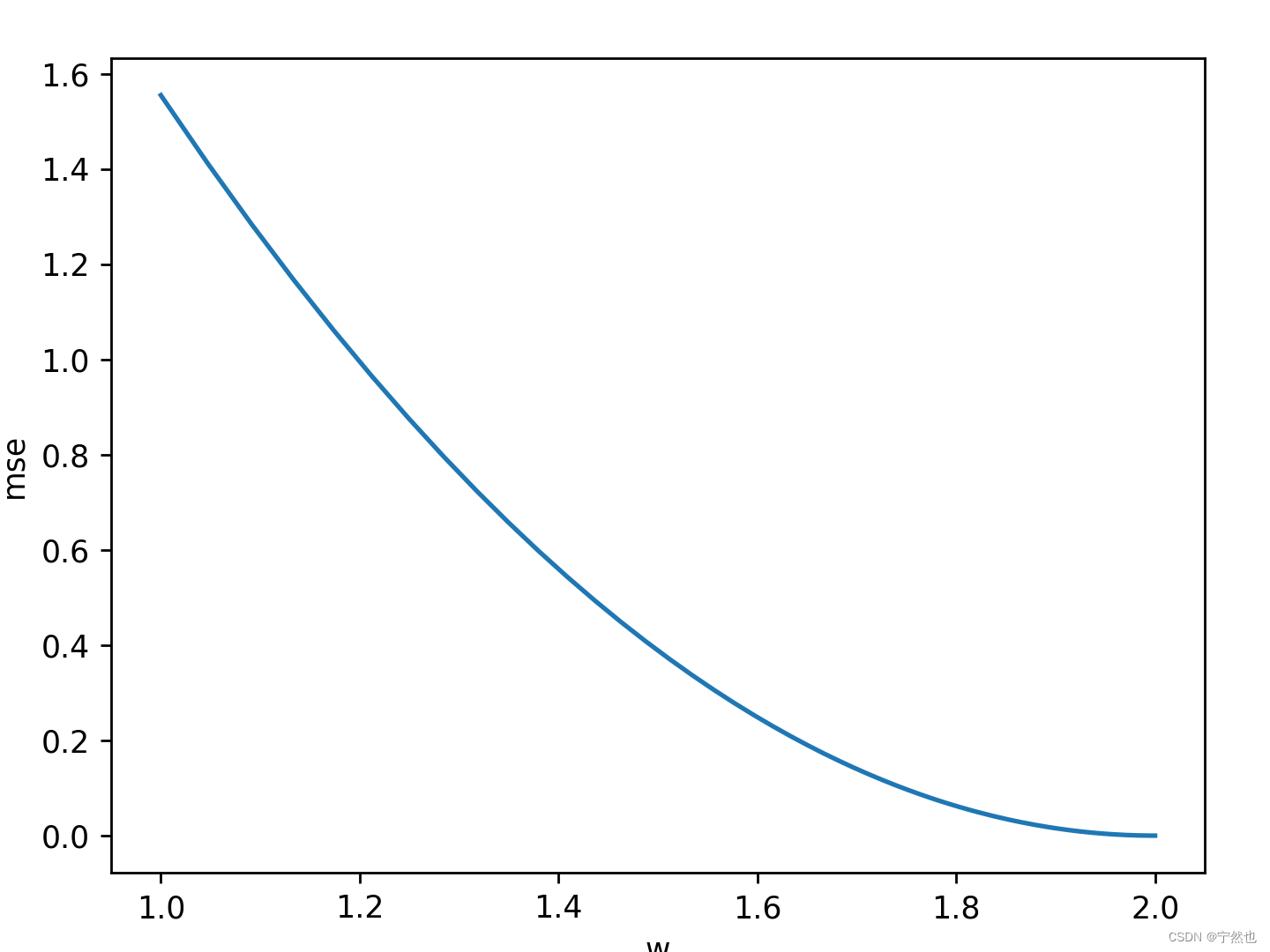
Station B Liu Erden - linear regression and gradient descent
【论文阅读】NFlowJS:基于鲁棒学习的合成负数据密集异常检测
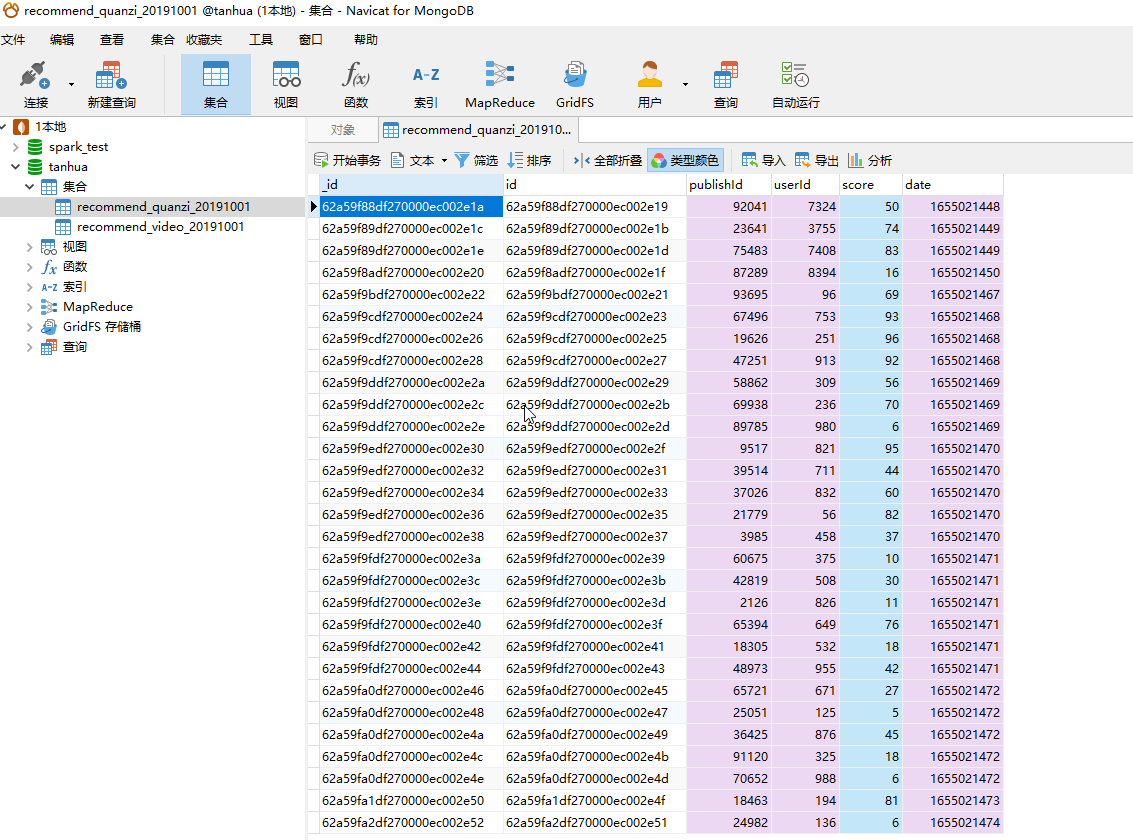
关于 PHP 启动 MongoDb 找不到指定模块问题

nodejs实现微博第三方登录
MPLS test report

LAN communication process in the same network segment

Embedded interview questions (IV. common algorithms)
Yygh-11-timing statistics

VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator
随机推荐
Garbage collector with serial, throughput priority and response time priority
Query the standard text code corresponding to a work center (s) in the production order
[experience] when ultralso makes a startup disk, there is an error: the disk / image capacity is too small
Sequoiadb Lake warehouse integrated distributed database, June 2022 issue
假设检验学习笔记
[leetcode] day96 - the first unique character & ransom letter & letter ectopic word
Zoom through the mouse wheel
Novice entry SCM must understand those things
Practice sharing: how to safely and quickly migrate from CentOS to openeuler
类和对象(一)this指针详解
[experience] install Visio on win11
Interface test: what are the components of the URL in fiddler
授予渔,从0开始搭建一个自己想要的网页
Hongliao Technology: Liu qiangdong's "heavy hand"
进程和线程
HCIA复习
初识数据库
My 2021
As3013 fire endurance test of cable distribution system
(5) Explanation of yolo-v3 core source code (3)