当前位置:网站首页>Data type of pytorch tensor
Data type of pytorch tensor
2022-07-07 01:04:00 【A traveler far away】
Processing data (Torch)
Tensor It's a special data structure , stay Pytorch in , Just use Tensor To encode the input of the model 、 Output and parameters of the model .
So you can think that if you want to use pytorch, Any data should be converted into tensor.
Data initialization
Method 1 :torch.tensor
function : Build general tensortorch.tensor(data, *, dtype=None, device=None, requires_grad=False, pin_memory=False)
data: initialization tensor The data of , Can be a list (list)、 Tuples (tuple)、numpy Array of ndarray、 Numeric scalars and other types .
dtype: Appoint tensor Data type of , Usually, the data types are as follows
| dtype | Data type description |
|---|---|
| torch.float16 or torch.half | 16 Bit floating point type |
| torch.float32 or torch.float | 32 Bit floating point type |
| torch.float64 or torch.double | 64 Bit floating point type |
| torch.uint8 | 8 Bit unsigned integer |
| torch.int8 | 8 Long long |
| torch.int16 or torch.short | 16 Long long |
| torch.int32 or torch.int | 32 Long long |
| torch.int64 or torch.long | 64 Long long |
| torch.bool | bool type |
| torch.complex64 or torch.cfloat | 64 Bitwise complex |
The above are some commonly used data types , If this parameter is not specified , that torch Will be based on data Automatically infer data types , So if data The data types inside are unified , Can , So big can be ignored dtype, Let it automatically infer .
device: Specify where the data runs , Or cpu Or gpu
| Specify the running device | keyword |
|---|---|
| cpu | ‘cpu’ |
| gpu | ‘cuda:index’ |
If you have more than one on your computer gpu, Then you can pass index Appoint , Of course, you can also write one directly cuda
Next, let's talk about the method of specifying equipment , There are usually two ways to specify devices
The way 1: Define a devicedata = [[1,2],[3,4]] cpu_device = torch.device('cuda') tensor_data = torch.tensor(data,device=cpu_device)
The way 2: Direct designation data = [[1,2],[3,4]] tensor_data = torch.tensor(data,device='cuda')
requires_grad:bool type , Used to specify whether the data can be updated by gradient , In the process of model training , You can set it to True, When doing the reverse gradient like this , Parameters can be updated .
pin_memory:bool type , by True When , take tensor Allocate to fixed memory . It should be noted that , This parameter is only in device by cpu It's going to work next time .
`
Complete example
torch.tensor([[0.11111, 0.222222, 0.3333333]],dtype=torch.float64,device=torch.device(‘cuda:0’))** Method 2 :torch.sparse_coo_tensor**
function : initialization Build a sparse tensor
torch.sparse_coo_tensor(indices, values, size=None, *, dtype=None, device=None, requires_grad=False)
`
Before explaining the parameters of this function , Let's first understand the principle of this function to build a sparse matrix , First post a picture drawn by the big guys on the Internet , More vivid 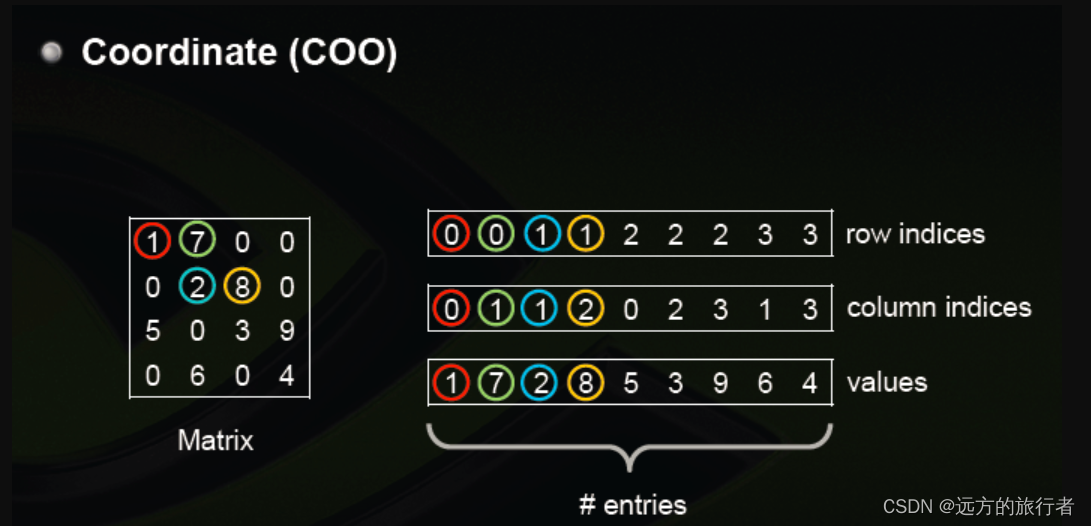
As you can see from the diagram , On the left is a sparse matrix , But it can go through , The data on the right indicates . The first row represents the row of non-zero data , The second row represents the column of non-zero data , The third line represents the data size of the specific location .
With this basic design concept , You can explain the meaning of each parameter
Parameter description :
indices: Specify the position of non-zero elements , That is, the first and second lines on the right in the above figure . It can be list,tuple,ndarray, An integer
values: Non zero value at specific position , Its order is calculated line by line , The non-zero value of the first line is first , And then in order .
size: Specify matrix size , That is, the size of the matrix on the left of the above figure , It can be list perhaps tuple
dtype: Specify the data type , Refer to the above tensor
device : Designated equipment , Refer to the above tensor
requires_grad: Specify whether the data can be updated by gradient , Refer to the above tensor
Specific examples
The example above is implemented as follows i = torch.tensor([[0,0,1,1,2,2,2,3,3],[0,1,1,2,0,2,3,1,3]]) v = torch.tensor([1,7,2,8,5,3,9,6,4],dtype=torch.float32) spar_tensor = torch.sparse_coo_tensor(i,v,size = [4,4],dtype=torch.float64,device=torch.device('cpu'))
Method 3 :tensor.asarray
function : initialization , Similar to the copy function torch.asarray(obj, *, dtype=None, device=None, copy=None, requires_grad=False)
Parameter description :
obj: It can be tensor,numpy array Other types
copy: bool type , If True when , Namely copy A copy of the data , If it is false, Is a quotation , Change a data , The other will change .
device: Designated equipment
requires_grad : Specifies whether gradients are supported
Specific examples a = torch.tensor([1,2,3]) b = torch.asarray(a) c = torch.asarray(a,copy=True,dtype=torch.float32,device = 'cpu')
Method four :torch.as_strided
function : Create a view , It is convenient to observe the data of specific location torch.as_strided(input, size, stride, storage_offset=0)
Parameter description :
input:tensor, The original input tensor
size: Define the size of the output data , It can be tuple perhaps int
stride: Specify the stride of the view , This parameter is actually quite abstract , Its function is not to be separated by much input Collect data on , It can be tuple perhaps int.
storage_offset: The starting position of data collection , Usually it is int.
Specific examples
`
x = torch.randn(3, 3)
t = torch.as_strided(x, (2, 2), (1, 1))
x,t
(tensor([[-0.0215, 0.3483, -1.4443],
[-0.3040, 1.3200, 2.0977],
[ 0.7380, 1.0222, -0.6579]]),
tensor([[-0.0215, 0.3483],
[ 0.3483, -1.4443]]))
`
Method five :torch.from_numpy
function : from ndarray In the initialization tensortorch.from_numpy(ndarray)
Other methods :
torch.zeros : establish 0 matrix
torch.zeros_like : establish 0 matrix , By inputting tensor The shape of the matrix creates the same shape 0 matrix tensor
torch.ones : establish 1 matrix
torch.ones_like : establish 1 matrix , By inputting tensor The shape of the matrix creates the same shape 1 matrix tensor
torch.range: and numpy Of range similar , Only the return value is tensor
torch.arange: and numpy Of arange similar , Only the return value is tensor
torch.linspace: and numpy Of linspace similar , Only the return value is tensor
torch.eye:: Create as 1 Diagonal matrix of
torch.empty: Define an empty tensor, Is equal to defining a variable
torch.empty_like: similar torch.ones_like
torch.full: Create a specified value filled tensor matrix
torch.full_like: similar torch.ones_like
tensor The index of 、 section 、 Connect 、 Mutation operation
torch.adjoint: For plural operations , Yes tensor Conjugate then transpose
torch.argwhere: return tensor Location index of non-zero value
torch.cat: Splicing tensor
torch.chunk: take tensor Split equally
torch.column_stac: It can be understood as transposing first , Then splice by column and row
torch.tensor_split: Split tensor
torch.hsplit: similar torch.tensor_split
torch.hstack: Vertical splicing tensor
torch.select: Returns a sliced tensor
torch.squeeze: Compress it into tensor by 1 Dimensions
torch.transpose:tensor Data exchange of different dimensions , So if it's two-dimensional data , When it is two-dimensional , After the exchange is transpose .
torch.t: Transposition , and torch.transpose similar
torch.take: obtain tensor Value of corresponding position , And then return the new tensor
torch.unsqueeze: increase tensor Dimensions
Mathematical operation
torch.acos: Calculation tensor The arccosine of
torch.cos: Cosine operation
torch.sin: Sinusoidal operation
torch.tan: Tangent operation
torch.add: Add operation
torch.sub: Reduction of operating
torch.mul:tensor Multiply the corresponding positions
torch.mm:tensor matrix multiplication
torch.div: Division operation
torch.pow: Power operation
torch.exp: Index operation
torch.log:log operation
torhc.sqrt: Root operation
torch.ceil: Rounding up
torch.floor: Rounding down
torch.abs: return tensor The absolute value
torch.neg:tensor Take the opposite
torch.frac: Get the decimal part
torch.imag: Take the imaginary part of the complex number
torch.real: Take the real part of the complex number
torch.round: Round to the nearest whole
torch.trunc: Take out the decimal point
torch.deg2rad: Angle turns to amplitude
torch.rad2deg: The amplitude changes to angle
torch.clip: Same as torch.clamp, Limit the size of an array to a range , Greater than the maximum , Replace with the maximum , If it is less than the minimum value, use the minimum value instead
torch.argmax: Index that takes the maximum value of different dimensions
torch.argmin: Index that takes the minimum value of different dimensions
torch.amax: Take the maximum value of different dimensions
torch.amin: Take the minimum value of different dimensions
torch.aminmax: Take the maximum and minimum values of different dimensions
torch.all: Whether all values are true
torch.any: Is there any one for true
torch.max: Find the maximum of all values
torch.min: Find the minimum of all values
torch.mean: Calculating mean
torch.nanmean: Find the mean value of non null values
torch.median: Find the median
torch.nanmedian: Find the median of non null value
torch…mode: Find the mode and the last index position where the mode appears
torch.nansum: Sum nonzero values
torch.sum: Sum up
torch.prod: Value multiplication
torch.std: Mean square error
torch.unique: Find the only value
torch.var: Variance estimation
torch.argsort: Return the index sorted by dimension
torch.eq: Compare whether the corresponding positions are equal
torch.equal: Why compare all values
torch.ge: The corresponding position is greater than or equal to
torch.gt: The corresponding position is greater than
torch.le: The corresponding position is less than or equal to
torch.lt: The corresponding position is less than
torch.ne: The corresponding position is not equal to the operation
torch.isin: Inclusion relation
torch.sort: The sorting operation
torch.topk: seek topK
边栏推荐
- Advanced learning of MySQL -- basics -- basic operation of transactions
- Rainstorm effect in levels - ue5
- 什么是时间
- Batch obtain the latitude coordinates of all administrative regions in China (to the county level)
- . Bytecode structure of class file
- Explain in detail the matrix normalization function normalize() of OpenCV [norm or value range of the scoped matrix (normalization)], and attach norm_ Example code in the case of minmax
- 学习使用代码生成美观的接口文档!!!
- build. How to configure the dependent version number in the gradle file
- [user defined type] structure, union, enumeration
- STM32开发资料链接分享
猜你喜欢

. Bytecode structure of class file

Dell笔记本周期性闪屏故障
ActiveReportsJS 3.1中文版|||ActiveReportsJS 3.1英文版
![[force buckle]41 Missing first positive number](/img/2e/6a0d3ea9264798f67be1ec1c81ca9e.jpg)
[force buckle]41 Missing first positive number
![[software reverse automation] complete collection of reverse tools](/img/72/d3e46a820796a48b458cd2d0a18f8f.png)
[software reverse automation] complete collection of reverse tools
Attention SLAM:一種從人類注意中學習的視覺單目SLAM
动态规划思想《从入门到放弃》
学习使用代码生成美观的接口文档!!!
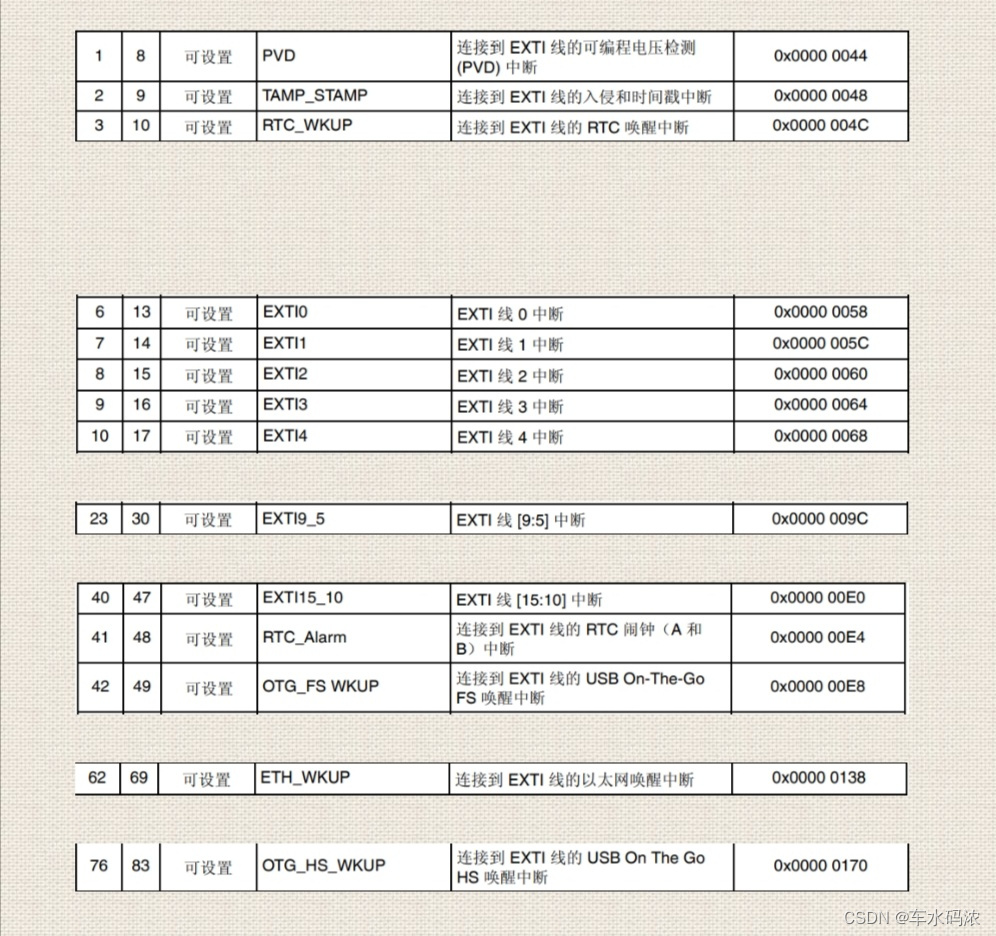
Part IV: STM32 interrupt control programming
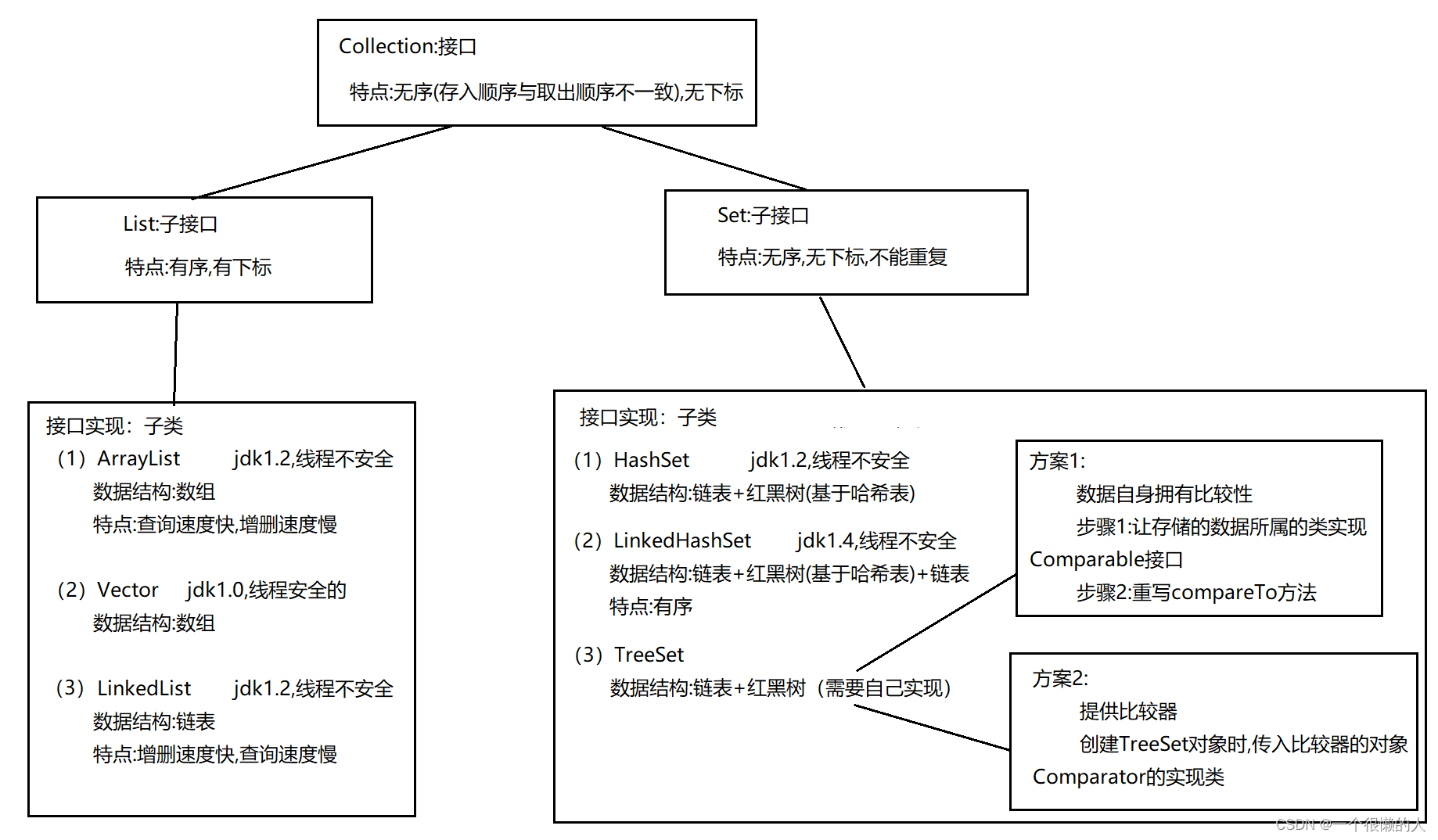
Set (generic & list & Set & custom sort)
随机推荐
【批处理DOS-CMD命令-汇总和小结】-查看或修改文件属性(ATTRIB),查看、修改文件关联类型(assoc、ftype)
Provincial and urban level three coordinate boundary data CSV to JSON
Part V: STM32 system timer and general timer programming
threejs图片变形放大全屏动画js特效
第五篇,STM32系统定时器和通用定时器编程
Attention slam: a visual monocular slam that learns from human attention
Web project com mysql. cj. jdbc. Driver and com mysql. jdbc. Driver differences
. Bytecode structure of class file
In rails, when the resource creation operation fails and render: new is called, why must the URL be changed to the index URL of the resource?
学习光线跟踪一样的自3D表征Ego3RT
Levels - UE5中的暴雨效果
windows安装mysql8(5分钟)
Return to blowing marshland -- travel notes of zhailidong, founder of duanzhitang
.class文件的字节码结构
Zynq transplant ucosiii
Part 7: STM32 serial communication programming
[HFCTF2020]BabyUpload session解析引擎
String comparison in batch file - string comparison in batch file
Dell笔记本周期性闪屏故障
How to get started and improve test development?