当前位置:网站首页>Research on cooperative control of industrial robots
Research on cooperative control of industrial robots
2022-07-06 03:11:00 【MocapLeader】
At present, industrial welding is mostly completed by industrial robots . In the field of arc welding , Traditionally, welding robots + Positioner + The welding workstation composed of tooling and fixtures can no longer meet the current small batch 、 Customized flexible automatic production demand . The cooperative welding system composed of multiple robots has stronger working ability 、 A wider workspace 、 More flexible system structure and organization , It can overcome the shortcomings of traditional welding workstation .
For a typical multi robot welding system with two workpiece handling robots and one welding robot , Controlling the cooperative movement of two handling robots is the key to realize high-quality welding . The problems to be solved include : Trajectory planning of dual robot cooperation 、 Modeling of dual robot cooperation system 、 And where the two robots work together / Force coordination control, etc .

Researchers from the school of automation of Southeast University have carried out research on the subject of peer-to-peer cooperative control of two robots . The object-oriented trajectory planning method is studied , And build a simulation platform to verify . At the same time, mathematical modeling for dual robots , Determine the end mapping relationship , The impedance control method based on position is used to adjust the position of the two robots in the process of cooperation / Force relation .
To verify the effectiveness of the system , The researchers put two estones ER16 General six joint robot as the control object , Completed the joint movement of steel pipe clamping by two robots .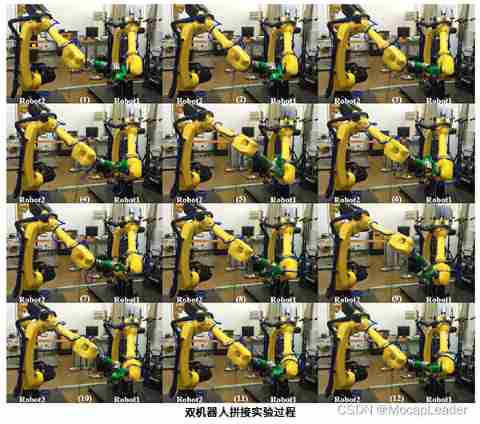
Planning the trajectory of the two robot cooperation system , First of all, we need to determine the relative pose of the base coordinate system of the two robots , In the experiment, a workpiece customized for calibration is installed at the ends of two robots , Three reflective markers are installed on each calibration workpiece (Marker spot ), The distance from the mark point on the center of the circle to the center of the other two mark points is 100mm, utilize NOKOV The measuring optical 3D motion capture system locates the marker Point location , To determine the pose of the workpiece at the end of the robot , Thus, the relative pose of the two robots in the base coordinate system is measured .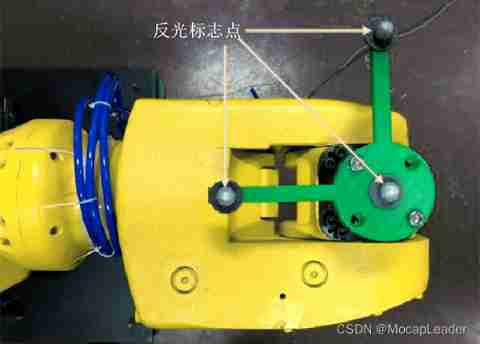
NOKOV It is measured that the positioning accuracy of optical motion capture system reaches sub millimeter level , It can accurately obtain the real-time six degrees of freedom data of the target , Ensure the smooth progress of scientific research projects .
reference :
[1] state . Research on peer-to-peer cooperative control of two robots based on impedance model [D]. Southeast University ,2018.
边栏推荐
- Audio audiorecord binder communication mechanism
- Selenium share
- Web security SQL injection vulnerability (1)
- My C language learning record (blue bridge) -- under the pointer
- Introduction to robotframework (I) brief introduction and use
- Is there a completely independent localization database technology
- OCR文字识别方法综述
- 深入探究指针及指针类型
- What are the principles of software design (OCP)
- Rust language -- iterators and closures
猜你喜欢

下一个行业风口:NFT 数字藏品,是机遇还是泡沫?
Introduction to robotframework (II) app startup of appui automation
真机无法访问虚拟机的靶场,真机无法ping通虚拟机
【若依(ruoyi)】设置主题样式

My C language learning record (blue bridge) -- on the pointer
Precautions for single chip microcomputer anti reverse connection circuit
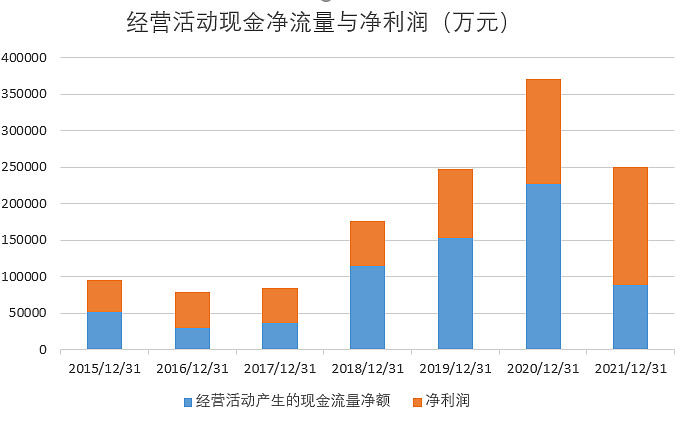
What is the investment value of iFLYTEK, which does not make money?
Solve 9 with C language × 9 Sudoku (personal test available) (thinking analysis)
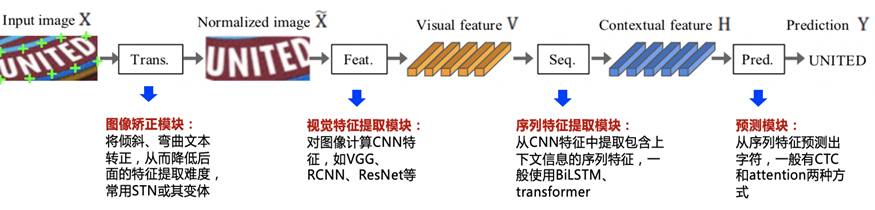
OCR文字识别方法综述
适合程序员学习的国外网站推荐
随机推荐
全国大学生信息安全赛创新实践赛初赛---misc(永恒的夜)
Who is the winner of PTA
Solution: attributeerror: 'STR' object has no attribute 'decode‘
Linear programming matlab
Selenium share
[Yu Yue education] basic reference materials of digital electronic technology of Xi'an University of Technology
Performance analysis of user login TPS low and CPU full
Overview of OCR character recognition methods
电机控制反Park变换和反Clarke变换公式推导
不赚钱的科大讯飞,投资价值该怎么看?
Huawei, H3C, Cisco command comparison, mind map form from the basic, switching, routing three directions [transferred from wechat official account network technology alliance station]
Technology sharing | what if Undo is too big
Analyze menu analysis
Introduction to robotframework (III) Baidu search of webui automation
C language - Blue Bridge Cup - promised score
Game theory matlab
Classic interview question [gem pirate]
Leetcode problem solving -- 98 Validate binary search tree
Recommended foreign websites for programmers to learn
ERA5再分析资料下载攻略