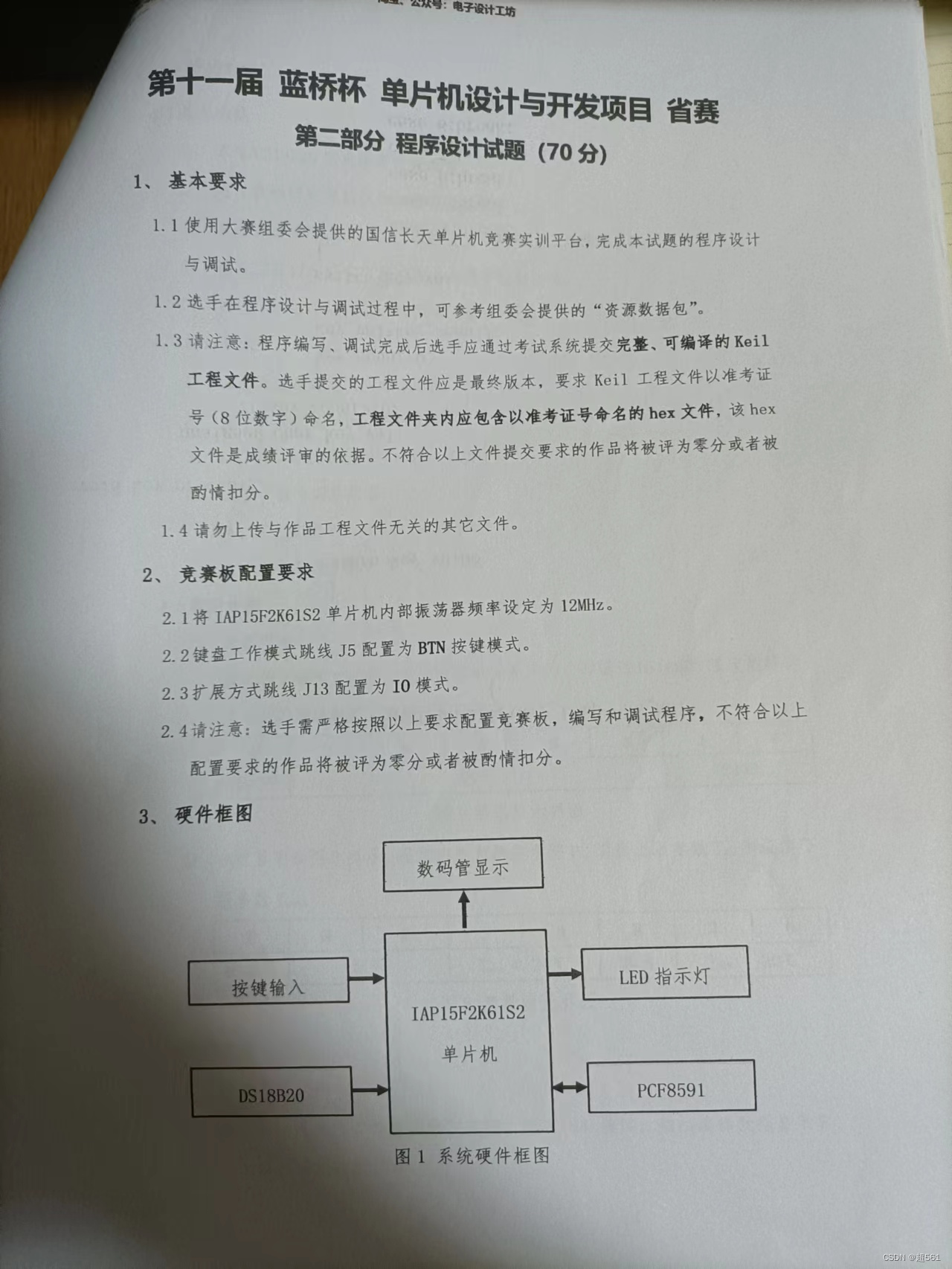
当前位置:网站首页>The second game of the 11th provincial single chip microcomputer competition of the Blue Bridge Cup
The second game of the 11th provincial single chip microcomputer competition of the Blue Bridge Cup
2022-07-02 03:38:00 【Super 561】

main.c
#include <STC15F2K60S2.H>
#include <ONEWIRE.H>
#include <IIC.H>
void Device_ctrl(unsigned char p2date,unsigned char p0date)
{
P0=p0date;
P2=P2&0X1F|p2date;
P2&=0X1F;
}
unsigned char smg_display[8];
unsigned char smg_du[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};
unsigned int smg_count;
unsigned char display_mode;
unsigned int temp;
unsigned int temp_count;
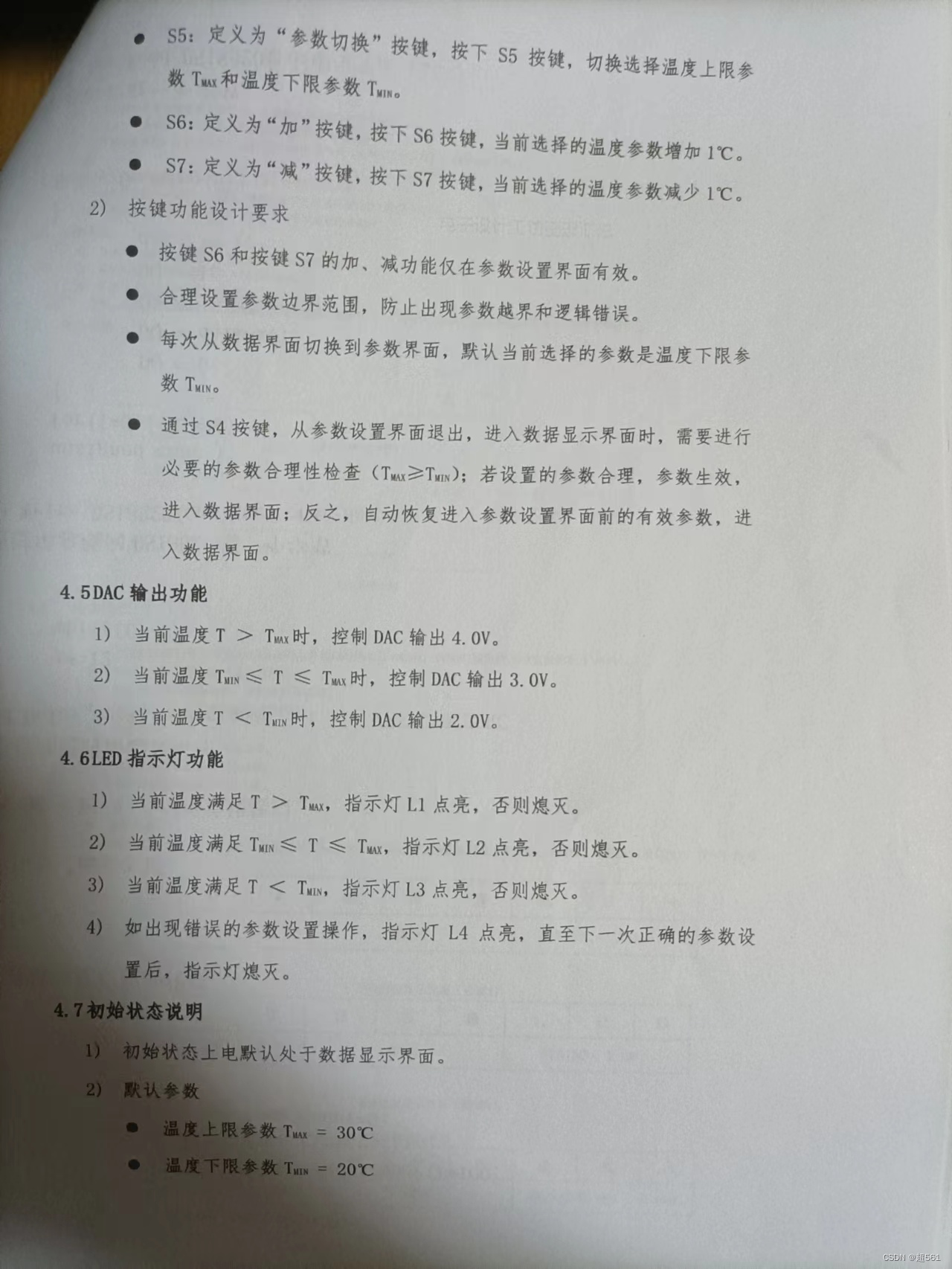
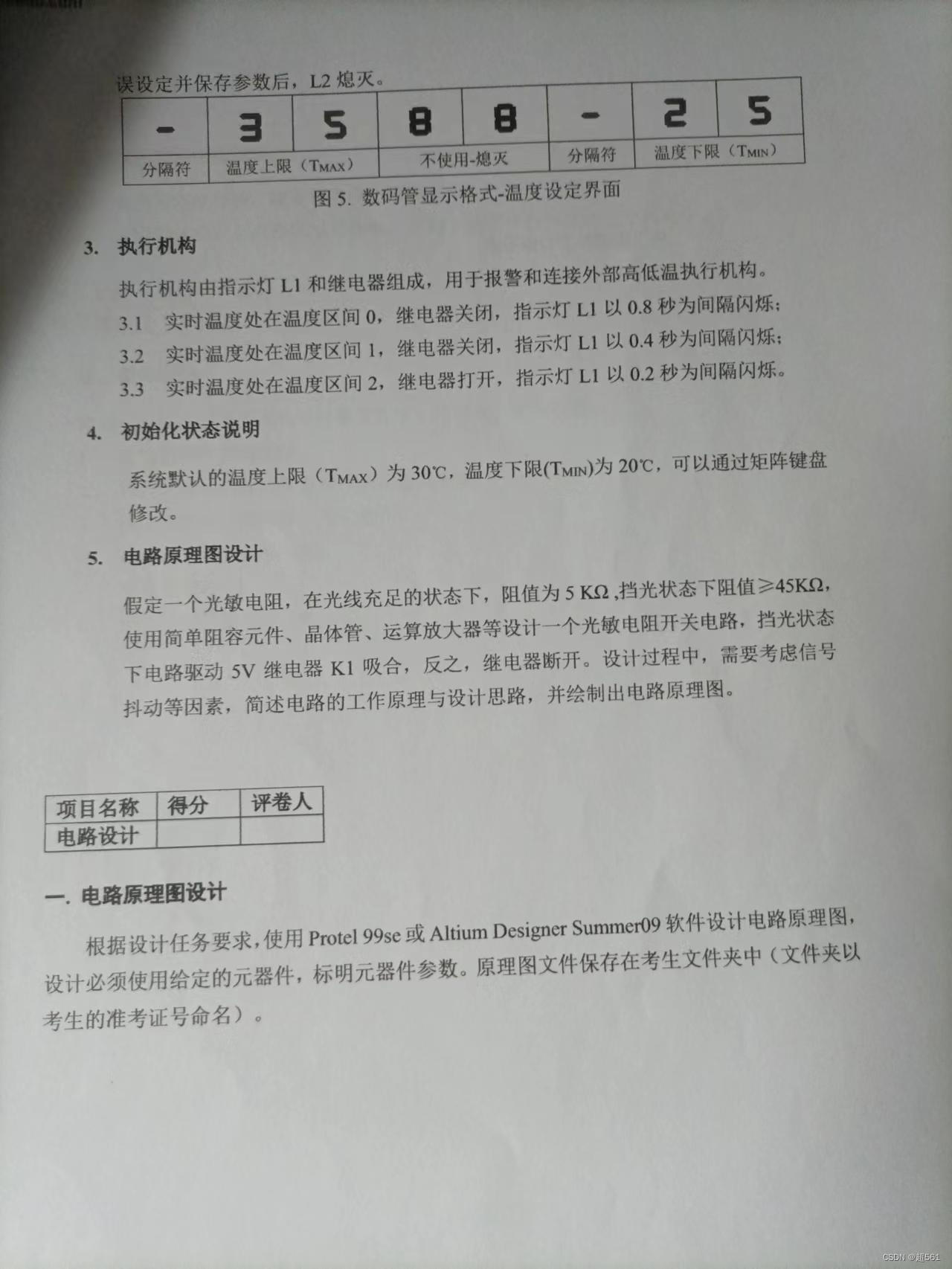
unsigned int Tmax_set=30;
unsigned int Tmin_set=20;
unsigned int Tmax=30;
unsigned int Tmin=20;
unsigned int da_count;
unsigned int led_count;
unsigned char led_ctrl=0xff;
bit led_flag;
void da(unsigned char date)
{
IIC_Start();
IIC_SendByte(0x90);
IIC_WaitAck();
IIC_SendByte(0x40);
IIC_WaitAck();
IIC_SendByte(date);
IIC_WaitAck();
IIC_Stop();
}
void da_process()
{
if(da_count>10)
{
da_count=0;
if(temp<Tmin)
{
da(51*2);
}
if((Tmin<=temp)&&(temp<=Tmax))
{
da(51*3);
}
if(temp>Tmax)
{
da(51*4);
}
}
}
void led_process()
{
if(led_count>10)
{
led_count=0;
if(temp<Tmin)
{
led_ctrl&=~0x04;
}
else
{
led_ctrl|=0x04;
}
if((temp<=Tmax)&&(temp>=Tmin))
{
led_ctrl&=~0x02;
}
else
{
led_ctrl|=0x02;
}
if(temp>Tmax)
{
led_ctrl&=~0x01;
}
else
{
led_ctrl|=0x01;
}
if(led_flag)
{
led_ctrl&=~0x08;
}
else
{
led_ctrl|=0x08;
}
Device_ctrl(0x80,led_ctrl);
}
}
void temp_process()
{
if(temp_count>100)
{
temp_count=0;
temp=read_temp();
Init_temp();
}
}
void smg_show()
{
unsigned char i;
Device_ctrl(0xc0,0);
Device_ctrl(0xe0,~smg_display[i]);
Device_ctrl(0xc0,0x01<<i);
i=(i+1)%8;
}
void smg_process()
{
if(smg_count>3)
{
smg_count=0;
if(display_mode==0)
{
smg_display[0]=0x39;
smg_display[1]=0x00;
smg_display[2]=0x00;
smg_display[3]=0x00;
smg_display[4]=0x00;
smg_display[5]=0x00;
smg_display[6]=smg_du[temp/10];
smg_display[7]=smg_du[temp%10];
}
else if(display_mode==1)
{
smg_display[0]=0x73;
smg_display[1]=0x00;
smg_display[2]=0x00;
smg_display[3]=smg_du[Tmax_set/10];
smg_display[4]=smg_du[Tmax_set%10];
smg_display[5]=0x00;
smg_display[6]=smg_du[Tmin_set/10];
smg_display[7]=smg_du[Tmin_set%10];
}
}
}
unsigned char Trig_btn;
unsigned char Cont_btn;
unsigned int key_count;
bit key_set;
void key_btn()
{
unsigned char readdate=P3^0XFF;
Trig_btn=readdate&(Cont_btn^readdate);
Cont_btn=readdate;
}
void key_process()
{
if(key_count>10)
{
key_count=0;
key_btn();
if(Trig_btn==0x08)//s4
{
display_mode++;
if(display_mode==2)
{
if(Tmax_set>=Tmin_set)
{
Tmax=Tmax_set;
Tmin=Tmin_set;
led_flag=0;
}
else
{
Tmax=Tmax;
Tmin=Tmin;
Tmax_set=Tmax;
Tmin_set=Tmin;
led_flag=1;
}
display_mode=0;
}
}
if(Trig_btn==0x04)//s5
{
key_set=~key_set;
}
if(Trig_btn==0x02)//s6
{
if(display_mode==1)
{
if(key_set==0)
{
if(Tmax_set<99)
{
Tmax_set++;
}
}
else
{
if(Tmin_set<99)
{
Tmin_set++;
}
}
}
}
if(Trig_btn==0x01)//s7
{
if(display_mode==1)
{
if(key_set==0)
{
if(Tmax_set>0)
{
Tmax_set--;
}
}
else
{
if(Tmin_set>0)
{
Tmin_set--;
}
}
}
}
}
}
void Timer2Init() //1 millisecond @12.000MHz
{
AUXR &= 0xFB; // Timer clock 12T Pattern
T2L = 0x18; // Set initial value of timing
T2H = 0xFC; // Set initial value of timing
AUXR |= 0x10; // Timer 2 Start timing
IE2|=0x04;
EA=1;
}
void main()
{
Timer2Init();
while(1)
{
key_process();
smg_process();
temp_process();
da_process();
led_process();
}
}
void timer2service() interrupt 12
{
key_count++;
smg_count++;
temp_count++;
da_count++;
led_count++;
smg_show();
}iic.c
#include "iic.h"
#define DELAY_TIME 5
//I2C Bus internal delay function
void IIC_Delay(unsigned char i)
{
do{_nop_();}
while(i--);
}
//I2C Bus start signal
void IIC_Start(void)
{
SDA = 1;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 0;
}
//I2C Bus stop signal
void IIC_Stop(void)
{
SDA = 0;
SCL = 1;
IIC_Delay(DELAY_TIME);
SDA = 1;
IIC_Delay(DELAY_TIME);
}
// Send a reply or non reply signal
void IIC_SendAck(bit ackbit)
{
SCL = 0;
SDA = ackbit;
IIC_Delay(DELAY_TIME);
SCL = 1;
IIC_Delay(DELAY_TIME);
SCL = 0;
SDA = 1;
IIC_Delay(DELAY_TIME);
}
// Waiting for an answer
bit IIC_WaitAck(void)
{
bit ackbit;
SCL = 1;
IIC_Delay(DELAY_TIME);
ackbit = SDA;
SCL = 0;
IIC_Delay(DELAY_TIME);
return ackbit;
}
//I2C The bus sends a byte of data
void IIC_SendByte(unsigned char byt)
{
unsigned char i;
for(i=0; i<8; i++)
{
SCL = 0;
IIC_Delay(DELAY_TIME);
if(byt & 0x80) SDA = 1;
else SDA = 0;
IIC_Delay(DELAY_TIME);
SCL = 1;
byt <<= 1;
IIC_Delay(DELAY_TIME);
}
SCL = 0;
}
//I2C The bus receives a byte of data
unsigned char IIC_RecByte(void)
{
unsigned char i, da;
for(i=0; i<8; i++)
{
SCL = 1;
IIC_Delay(DELAY_TIME);
da <<= 1;
if(SDA) da |= 1;
SCL = 0;
IIC_Delay(DELAY_TIME);
}
return da;
}
iic.h
#ifndef __IIC_H
#define __IIC_H
#include <STC15F2K60S2.H>
#include "intrins.h"
sbit SDA = P2^1;
sbit SCL = P2^0;
void IIC_Start(void);
void IIC_Stop(void);
bit IIC_WaitAck(void);
void IIC_SendAck(bit ackbit);
void IIC_SendByte(unsigned char byt);
unsigned char IIC_RecByte(void);
#endifonewire.c
#include "onewire.h"
// Single bus internal delay function
void Delay_OneWire(unsigned int t)
{
t=t*12;
while(t--);
}
// Single bus write operation
void Write_DS18B20(unsigned char dat)
{
unsigned char i;
for(i=0;i<8;i++)
{
DQ = 0;
DQ = dat&0x01;
Delay_OneWire(5);
DQ = 1;
dat >>= 1;
}
Delay_OneWire(5);
}
// Single bus read operation
unsigned char Read_DS18B20(void)
{
unsigned char i;
unsigned char dat;
for(i=0;i<8;i++)
{
DQ = 0;
dat >>= 1;
DQ = 1;
if(DQ)
{
dat |= 0x80;
}
Delay_OneWire(5);
}
return dat;
}
//DS18B20 initialization
bit init_ds18b20(void)
{
bit initflag = 0;
DQ = 1;
Delay_OneWire(12);
DQ = 0;
Delay_OneWire(80);
DQ = 1;
Delay_OneWire(10);
initflag = DQ;
Delay_OneWire(5);
return initflag;
}
void Init_temp()
{
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0x44);
}
float read_temp()
{
float temp;
unsigned char low,high;
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0xbe);
low=Read_DS18B20();
high=Read_DS18B20();
temp=(high<<8)|low;
temp=temp*0.0625;
return temp;
}
onewire.h
#ifndef __ONEWIRE_H
#define __ONEWIRE_H
#include <STC15F2K60S2.H>
sbit DQ = P1^4;
float read_temp();
void Init_temp();
#endif
边栏推荐
- [designmode] builder model
- halcon图像矫正
- Verilog parallel block implementation
- Global and Chinese markets for welding equipment and consumables 2022-2028: Research Report on technology, participants, trends, market size and share
- aaaaaaaaaaaaa
- MySQL connection query and subquery
- KL divergence is a valuable article
- 《MATLAB 神經網絡43個案例分析》:第42章 並行運算與神經網絡——基於CPU/GPU的並行神經網絡運算
- Discrimination between sap Hana, s/4hana and SAP BTP
- Network connection mode of QT
猜你喜欢

Yan Rong looks at how to formulate a multi cloud strategy in the era of hybrid cloud

Uniapp uses canvas to generate posters and save them locally
PY3, PIP appears when installing the library, warning: ignoring invalid distribution -ip
蓝桥杯单片机省赛第六届
![[designmode] builder model](/img/e8/855934d57eb6868a4d188b2bb1d188.png)
[designmode] builder model
![[HCIA continuous update] overview of dynamic routing protocol](/img/03/83c883afb63b7c63f6879b5513bac3.jpg)
[HCIA continuous update] overview of dynamic routing protocol

Review materials of project management PMP high frequency examination sites (8-1)
跳出舒适区,5年点工转型自动化测试工程师,我只用了3个月时间
焱融看 | 混合云时代下,如何制定多云策略
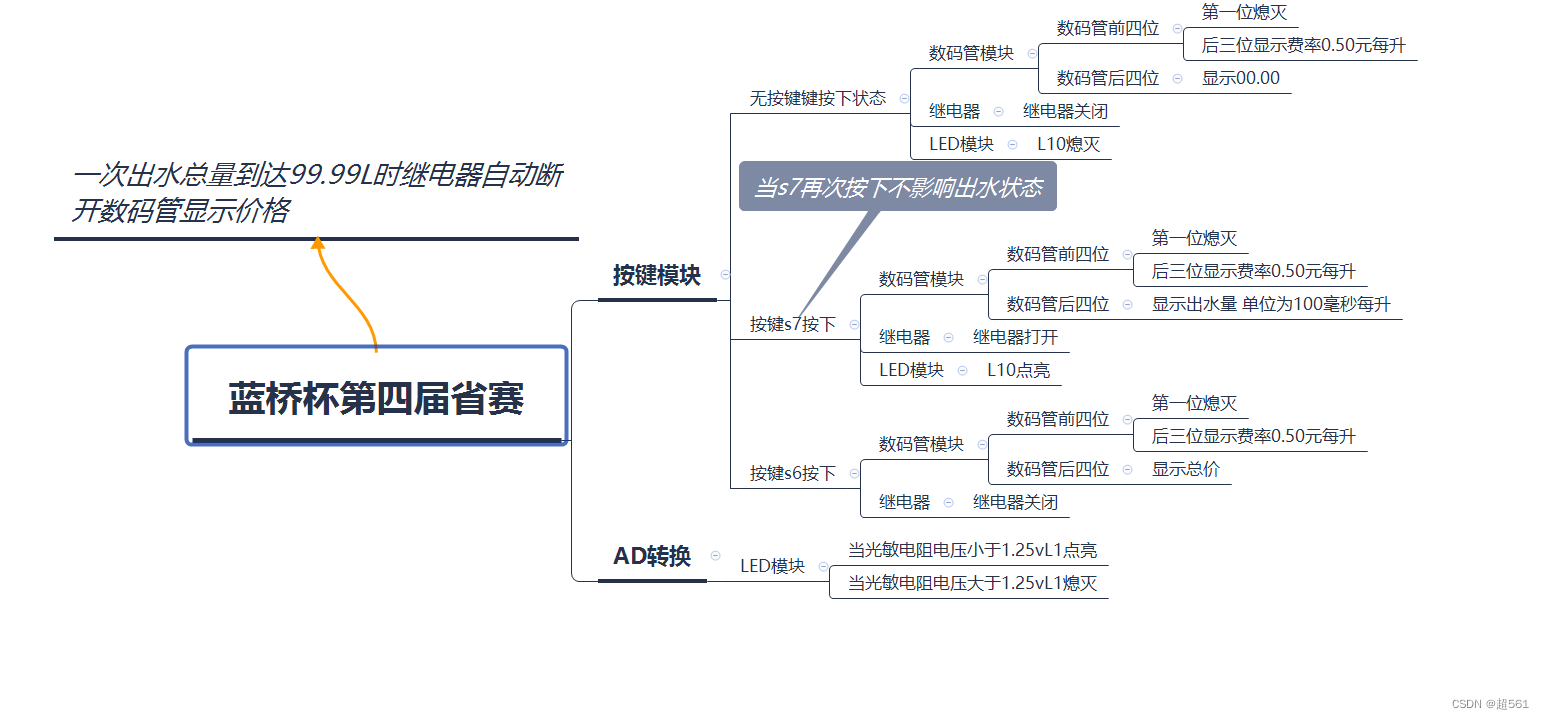
蓝桥杯单片机第四届省赛
随机推荐
Pycharm2021 delete the package warehouse list you added
Global and Chinese market of bone adhesives 2022-2028: Research Report on technology, participants, trends, market size and share
Imageai installation
Kotlin基础学习 14
C#联合halcon脱离halcon环境以及各种报错解决经历
一文彻底理解评分卡开发中——Y的确定(Vintage分析、滚动率分析等)
高性能 低功耗Cortex-A53核心板 | i.MX8M Mini
接口调试工具模拟Post上传文件——ApiPost
Basic syntax of unity script (7) - member variables and instantiation
蓝桥杯单片机省赛第九届
蓝桥杯单片机数码管技巧
[mv-3d] - multi view 3D target detection network
蓝桥杯单片机省赛第八届
0基础如何学习自动化测试?按照这7步一步一步来学习就成功了
[HCIA continuous update] working principle of OSPF Protocol
Global and Chinese markets for welding equipment and consumables 2022-2028: Research Report on technology, participants, trends, market size and share
蓝桥杯单片机省赛第十一届
Failed to upgrade schema, error: “file does not exist
Global and Chinese markets for hand hygiene monitoring systems 2022-2028: Research Report on technology, participants, trends, market size and share
Oracle viewing locked tables and unlocking