当前位置:网站首页>ORB(Oriented FAST and Rotated BRIEF)
ORB(Oriented FAST and Rotated BRIEF)
2022-07-05 00:09:00 【DWQY】
Always before ORB-SLAM Heard in various versions of ORB, But I don't know what is ORB. Take this opportunity to learn about ORB.
ORB(Oriented FAST and Rotated BRIEF). First of all, realize that ORB Not the name of the feature , It is a method to complete feature matching between images . The matching step is reflected in the naming . Here are two questions :
1.ORB What are the advantages of ?
It can solve two common problems of feature matching between images :(1). Scaling problem (2). Rotation problem . Here is a detailed introduction ORB Two processes of , We can learn how to solve these two common problems
2. Introduce ORB Two processes of
ORB There are two characteristics : Key points (Oriented FAST)、 Narrator (BRIEF, Binary Robust Independent Elementary Feature). The key point goes without saying , The reason why it is called descriptor is that it describes the image information around the key points , And use the description vector to express .
ORB Contains two parts of improvement , Part of it is FAST, Improve to Oriented FAST. Part of it is BRIEF, Improve to Rotated BRIEF.
ORB There are two steps : feature extraction → Feature matching
1) feature extraction
Feature extraction includes two steps :FAST Extract key points →BRIEF Descriptor calculation
(1)FAST Corner point ( Key points ) extract
FAST The determination steps of corner points are as follows :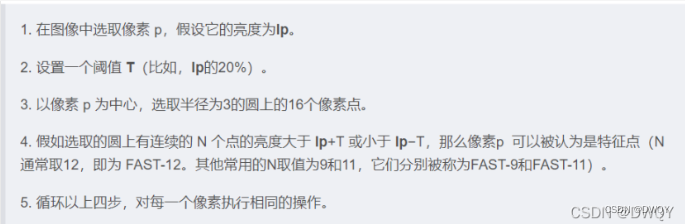
Actually ORB The reason for the good effect lies in the effectiveness of feature extraction : Divide the pictures into squares , Extract... Within the grid FAST Key points . Keep dividing ( Quadtree structure ), Until it approaches the preset value . Try to ensure that each grid has one FAST spot ( It is allowed that there is no FAST spot , Multiple cells are also allowed FAST spot , Multiple situations retain the largest response FAST Key points , To avoid corner concentration ), Finally, the distribution of feature key points is uniform . The feature points are evenly distributed , Ensure the effectiveness of feature extraction .
Oriented FAST a FAST The improvement is to increase the rotation invariance 、 Scale invariance , After improvement, it can increase the robustness of representation in different images . The embodiment of rotation invariance is in addition to FAST The position of feature points in the also increases the direction . The resolution of scale invariance is based on image pyramid .
Understanding of image pyramid : A pair of pictures , Store with different scaling factors . According to the size of the picture to be matched , Select the appropriate level image for matching
The above two improved strategies solve two problems of feature extraction :(1). Scaling problem (2). Rotation problem
(2)BRIEF Descriptor calculation
Descriptor calculation is mainly to retain the information around key points , Used for matching between key points after .rBRIEF a BRIFT The rotation invariance is maintained , Just using the calculation of the direction in the corner calculation just now .
2) Feature matching :
Feature matching is to find the corresponding matching points between two frames ( In image processing, the basic unit is frame , Data processing is performed in two adjacent frames ). The concept of feature matching is well understood , It is mainly the matching algorithm of feature matching . Here are three , But there are more than three
(1) Violent match
The main idea : Calculate the descriptive sub distance of each pair of key points in two frames of images , Sort , Take the nearest as the matching point .
The descriptor distance indicates the degree of similarity , The smaller, the more similar . The specific calculation process is no longer stated in this statement ( I don't know ~)
(2)SearchForInitialization
The main idea : Delimit a certain area around the point to be matched , The histogram is established according to the direction of all other points in the area . Find the first three directions with the largest number of feature points , Determine the first main direction and the second main direction according to the judgment formula ( May not exist )
(3)SearchByProjection
The main idea : The pose is estimated according to the uniform velocity model , Project the map corresponding to the point of the previous frame to the current frame , Calculate search points ( On current frame ) Hamming distance to the previous frame point ( Used for binary distance measurement ), If Hamming distance is less than threshold , It is considered to be its matching point . After posture optimization , The matching point satisfying the condition is greater than 10 It is considered that the two frame tracking is successful
notes : The binary corresponding bits are different , The distance between Han and Ming will increase 1. So the higher the degree of similarity , The smaller the distance between Han and Ming .
This article is simple to ORB There's an impression ,ORB Itself is not my focus .ORB How to be in ORB-SLAM It is important to play a role in various versions of ( At present, it is not obvious ,ORB-SLAM In the description process, it seems that the specific description of the feature matching method is directly omitted , It just states the choice ORB As a feature matching method )
Reference material :
1.ORB Feature matching
2.ORB Feature point matching
3.【 Detailed explanation 】ORB Feature extraction and matching _ Bili, Bili
Due to the limited level of the author , If something is wrong , Please correct in the comments area below , thank you !
边栏推荐
- [kotlin] the third day
- Five papers recommended for the new development of convolutional neural network in deep learning
- Face recognition 5- insight face padding code practice notes
- Cross domain request
- Fast analysis -- easy to use intranet security software
- [paper reading] cavemix: a simple data augmentation method for brain vision segmentation
- AcWing164. 可达性统计(拓扑排序+bitset)
- 股票账户佣金怎么调低,炒股佣金怎么调低网上开户安全吗
- 人脸识别5- insight-face-paddle-代码实战笔记
- 实战模拟│JWT 登录认证
猜你喜欢

华为200万年薪聘请数据治理专家!背后的千亿市场值得关注
人脸识别5- insight-face-paddle-代码实战笔记

How to effectively monitor the DC column head cabinet
Significance of acrel EMS integrated energy efficiency platform in campus construction
如何避免电弧产生?—— AAFD故障电弧探测器为您解决
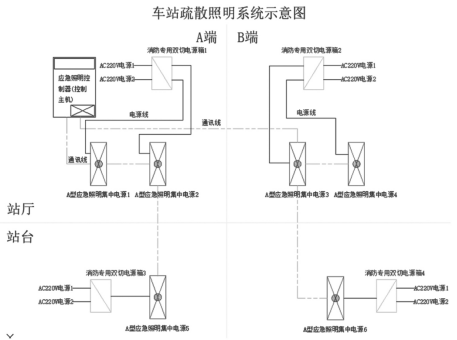
城市轨道交通站应急照明疏散指示系统设计
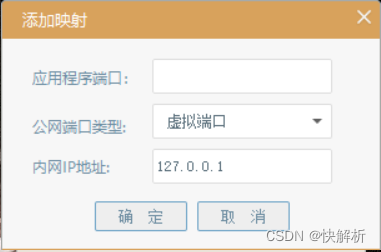
What is the difference between port mapping and port forwarding
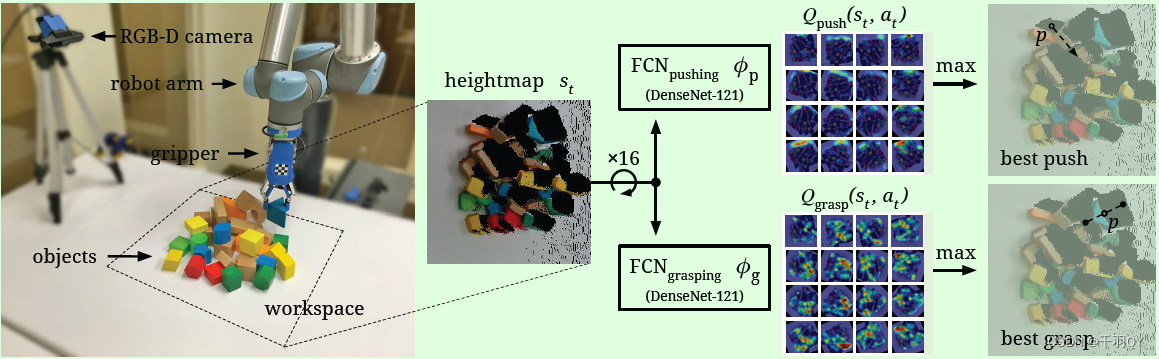
机器人强化学习——Learning Synergies between Pushing and Grasping with Self-supervised DRL (2018)
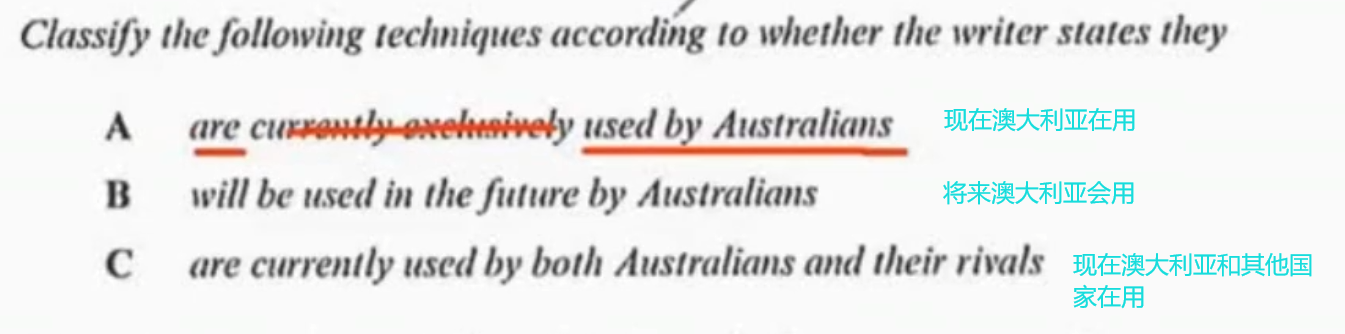
【雅思阅读】王希伟阅读P4(matching1)

Hong Kong Jewelry tycoon, 2.2 billion "bargain hunting" Giordano
随机推荐
AcWing164. 可达性统计(拓扑排序+bitset)
22-07-02周总结
挖财学院开户安全的吗?开户怎么开?
abc 258 G - Triangle(bitset)
Is it safe to open and register new bonds? Is there any risk? Is it reliable?
香港珠宝大亨,22亿“抄底”佐丹奴
Some basic functions of enterprise projects are developed, and important things are saved to online first a
uniapp微信小程序拿来即用的瀑布流布局demo2(方法二)(复制粘贴即可使用,无需做其他处理)
Advanced template
跨域请求
P3304 [SDOI2013]直径(树的直径)
企业应用业务场景,功能添加和修改C#源码
French scholars: the explicability of counter attack under optimal transmission theory
Remember to build wheels repeatedly at one time (the setting instructions of obsidian plug-in are translated into Chinese)
人脸识别5- insight-face-paddle-代码实战笔记
IELTS examination process, what to pay attention to and how to review?
go踩坑——no required module provides package : go.mod file not found in current directory or any parent
OpenHarmony资源管理详解
Skills in analyzing the trend chart of London Silver
It's too convenient. You can complete the code release and approval by nailing it!