当前位置:网站首页>[filter tracking] comparison between EKF and UKF based on MATLAB extended Kalman filter [including Matlab source code 1933]
[filter tracking] comparison between EKF and UKF based on MATLAB extended Kalman filter [including Matlab source code 1933]
2022-07-07 11:46:00 【Poseidon light】
One 、 How to get the code
How to get the code 1:
The complete code has been uploaded to my resources :【 Filter tracking 】 be based on matlab Extended Kalman filter EKF And unscented Kalman filter UKF Compare 【 contain Matlab Source code 1933 period 】
How to get the code 2:
By subscribing to Ziji Shenguang blog Paid column , With proof of payment , Private Blogger , This code is available .
remarks : Subscribe to Ziji Shenguang blog Paid column , Free access to 1 Copy code ( The period of validity From the Subscription Date , Valid for three days );
Two 、EKF Introduction to the algorithm
stay SLAM Problem solving method ,EKF Algorithm is a commonly used classical algorithm . The self localization process of robot is a nonlinear process ,EKF To solve the problem Kalman Filters cannot be applied to nonlinear systems , The main process of the filtering algorithm is prediction and update . In the process of prediction and update ,EKF The algorithm linearizes the original system equation and observation equation and obtains a high estimation result . If the nonlinearity in the system is weak ,EKF It can also give good estimation results .
When predicting , The system model used is as follows :
In style ,z(k+1) It means No k+1 The observation obtained in step ,W (k+1) Express Kalman gain , It also includes the weight of forward estimation in practice .
Realization EKF-SLAM The following aspects are required : System dynamic equation and corresponding parameters , Type of sensor used and observation equation , According to these, we can get EKF The corresponding form of . In two-dimensional plane EKF-SLAM Need to know that robots are X、Y The value of the direction , We also need to know the orientation of the robot's head in the two-dimensional plane and X The angle in the positive direction of the axis .
3、 ... and 、 Partial source code
%% Main function function :EKF And UKF error analysis , Performance comparison
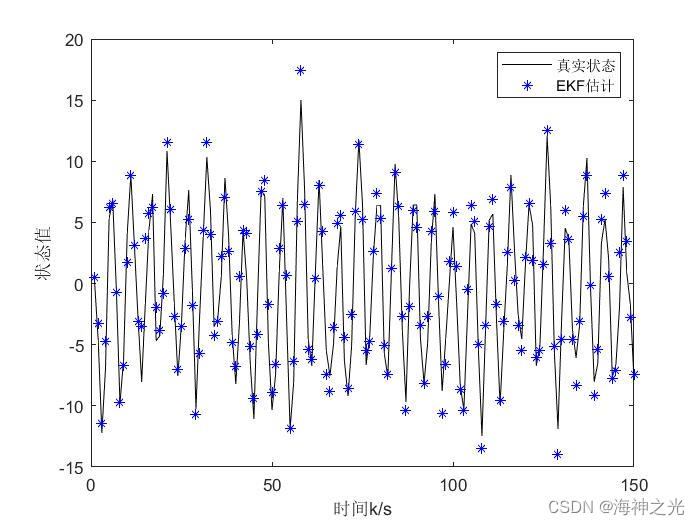
% Figure 1 : True state and EKF Filter state comparison
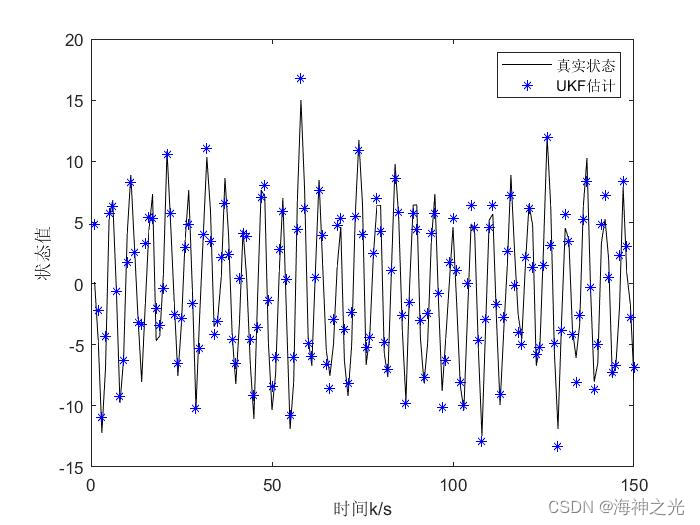
% Figure 2 : True state and UKF Filter state comparison
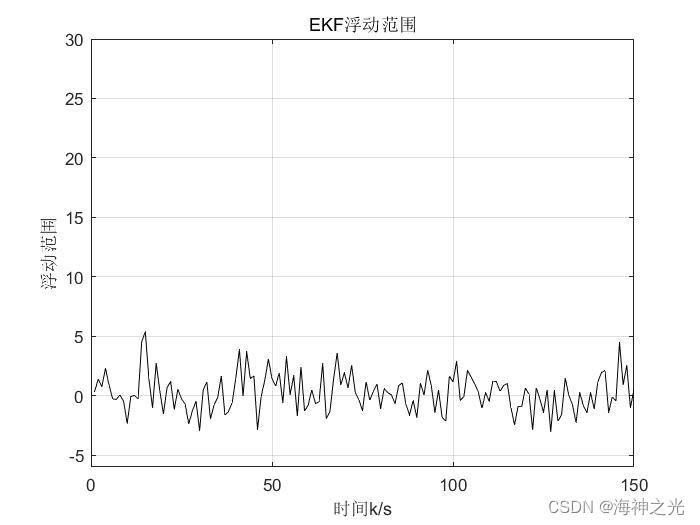
% Figure 3 :EKF Floating range of filtering error
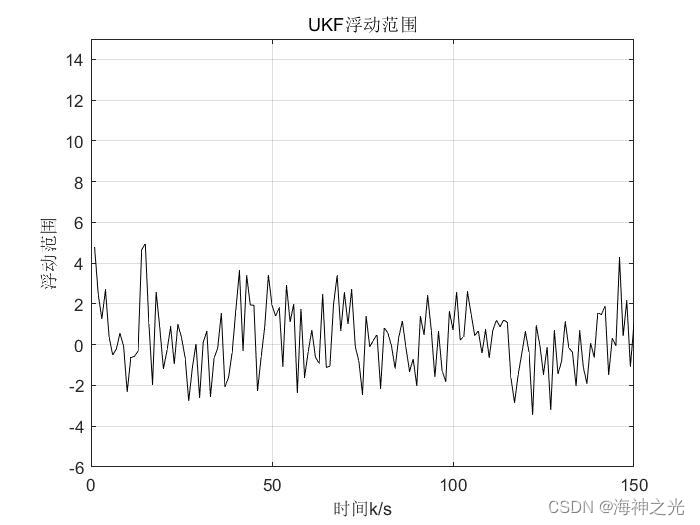
% Figure 4 :UKF Floating range of filtering error
N=150; % Simulation time
L=1;
Q=6; % Noise variance
R=1;
W=sqrtm(Q)*randn(L,N);
V=sqrt(R)*randn(1,N);
X=zeros(L,N);
X(:,1)=[0.1]';
Z=zeros(1,N);
Z(1)=X(:,1)^2/20+V(1);
Xukf=zeros(L,N);
Xukf(:,1)=X(:,1)+sqrtm(Q)*randn(L,1);
Pukf=eye(L);
Xekf=zeros(L,N);
Xekf(:,1)=X(:,1)+sqrtm(Q)*randn(L,1);
Pekf=eye(L);
% Algorithm simulation verification
for k=2:N
X(:,k)=0.5*X(:,k-1)+2.5*X(:,k-1)/(1+X(:,k-1)^2)+8*cos(1.2*k)+W(k);
Z(k)=X(:,k)^2/20+V(k);
[Xekf(:,k),Pekf]=EKF(Xekf(:,k-1),Pekf,Z(k),Q,R,k);
[Xukf(:,k),Pukf]=UKF(Xukf(:,k-1),Pukf,Z(k),Q,R,k);
end
Four 、 Running results
5、 ... and 、matlab Edition and references
1 matlab edition
2014a
2 reference
[1] Shen Zaiyang . Master MATLAB signal processing [M]. tsinghua university press ,2015.
[2] Gao Baojian , Peng Jinye , Wang Lin , Pan Jianshou . Signals and systems —— Use MATLAB Analysis and Implementation [M]. tsinghua university press ,2020.
[3] Wang Wenguang , Wei Shaoming , Ren Xin . Signal processing and system analysis MATLAB Realization [M]. Electronic industry press ,2018.
[4] Lin Zhidong . Based on extended Kalman Filter Algorithm SLAM Problem analysis [J]. City Building . 2020,17(11)
3 remarks
This part of the introduction is taken from the Internet , For reference only , If infringement , Contact deletion
边栏推荐
- 深度学习秋招面试题集锦(一)
- Android interview knowledge points
- Web端自动化测试失败的原因
- 科普达人丨一文弄懂什么是云计算?
- SwiftUI 4 新功能之掌握 WeatherKit 和 Swift Charts
- About the application of writing shell script JSON in JMeter
- 基于华为云IOT设计智能称重系统(STM32)
- In depth learning autumn recruitment interview questions collection (1)
- SwiftUI Swift 内功之如何在 Swift 中进行自动三角函数计算
- The post-90s resigned and started a business, saying they would kill cloud database
猜你喜欢
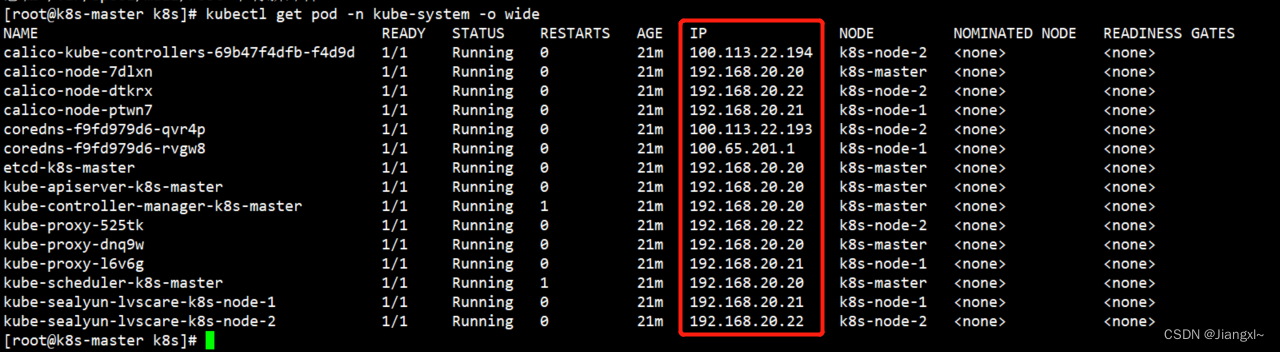
The running kubernetes cluster wants to adjust the network segment address of pod
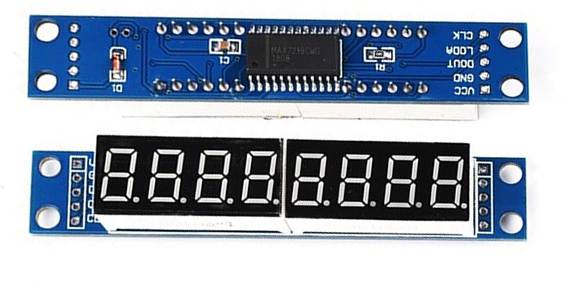
Stm32f1 and stm32subeide programming example -max7219 drives 8-bit 7-segment nixie tube (based on SPI)
The annual salary of general test is 15W, and the annual salary of test and development is 30w+. What is the difference between the two?
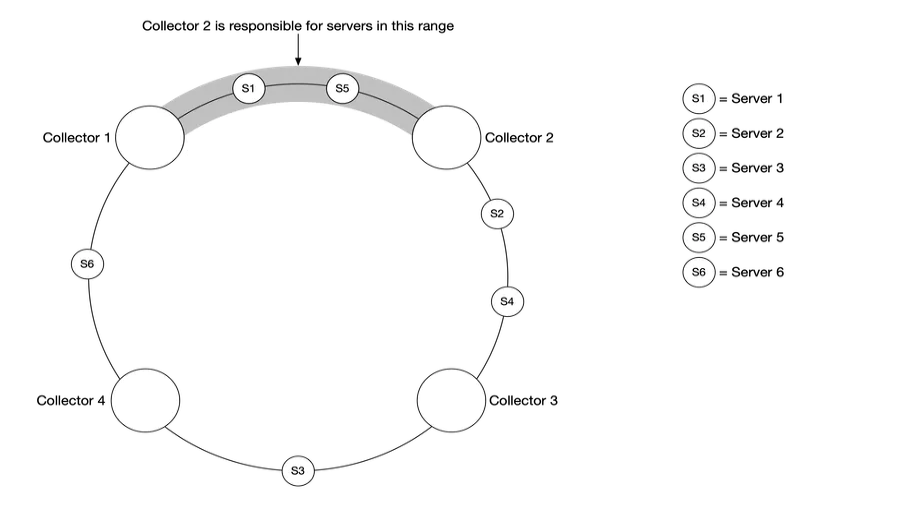
【系统设计】指标监控和告警系统
Talk about SOC startup (x) kernel startup pilot knowledge
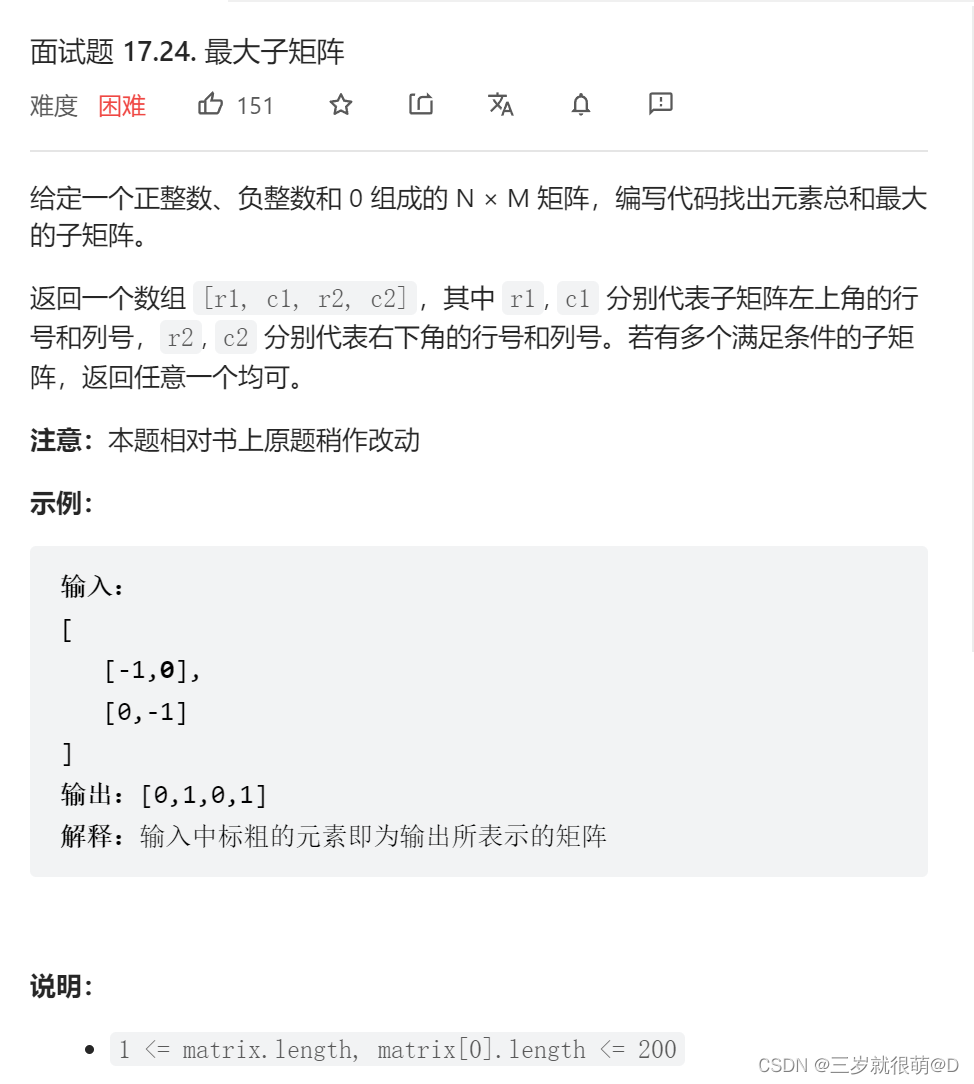
LeetCode - 面试题17.24 最大子矩阵
一度辍学的数学差生,获得今年菲尔兹奖
聊聊SOC启动(十) 内核启动先导知识

18 basic introduction to divider separator component of fleet tutorial (tutorial includes source code)

相机标定(1): 单目相机标定及张正友标定基本原理
随机推荐
Complete collection of common error handling in MySQL installation
sink 消费 到 MySQL, 数据库表里面已经设置了 自增主键, flink 里面,如何 操作?
简单介绍一下闭包及它的一些应用场景
【最短路】ACwing 1127. 香甜的黄油(堆优化的dijsktra或spfa)
千人規模互聯網公司研發效能成功之路
Flet教程之 17 Card卡片组件 基础入门(教程含源码)
聊聊SOC启动(九) 为uboot 添加新的board
electron添加SQLite数据库
聊聊SOC启动(七) uboot启动流程三
The annual salary of general test is 15W, and the annual salary of test and development is 30w+. What is the difference between the two?
聊聊SOC启动(十) 内核启动先导知识
技术分享 | 抓包分析 TCP 协议
Audit migration
In SQL, I want to set foreign keys. Why is this problem
SwiftUI Swift 内功之如何在 Swift 中进行自动三角函数计算
MySQL安装常见报错处理大全
聊聊SOC启动(十一) 内核初始化
[encapsulation of time format tool functions]
[extraction des caractéristiques de texture] extraction des caractéristiques de texture de l'image LBP basée sur le mode binaire local de Matlab [y compris le code source de Matlab 1931]
SwiftUI 教程之如何在 2 秒内实现自动滚动功能