当前位置:网站首页>Differential GPS RTK thousand search
Differential GPS RTK thousand search
2022-07-06 03:38:00 【woshizuopie】
Catalog
GPS and GNSS The difference between :
Difference GPS Positioning principle :
1. Position difference principle ( A little )
2. Pseudo range difference principle (DGPS)
3. Carrier phase difference principle (RTK)( a key )
GPS and GNSS The difference between :
GPS: Refers to global positioning system (Global Positioning System);
GNSS: Global satellite navigation system (Global Navigation Satellite System), It's the Beidou System 、GPS、GLONASS、Galileo System and other single satellite navigation and positioning systems .
Difference GPS Positioning principle :
Ordinary single point positioning technology is affected by the ionosphere due to the propagation of satellite signals in space 、 Troposphere, etc , The signal propagation has a certain refraction , It brings pseudo range observation error , Make the positioning accuracy in 5 To 10 Rice range . Differential positioning technology can eliminate the pseudo range measurement error , Effectively improve positioning accuracy . For all users in the same area , The errors caused by satellite signal propagation through the atmosphere are correlated , It can be considered that the errors are equal , The reference station calculates these measurement error values , It is transmitted to the mobile station through the network , So as to eliminate the GPS Measurement error value , Improve the accuracy of measurement and positioning . Differential enhancement technology is GNSS A complement to positioning , It can effectively improve the positioning accuracy .
GPS Positioning is to use the pseudo range of a group of satellites 、 Ephemeris 、 Satellite launch time and other observation values , At the same time, we must know the clock difference of users . therefore , To get the three-dimensional coordinates of the ground point , Must be right 4 A satellite to measure .
In this process , There are three parts of error . One part is shared by each user receiver , for example , Satellite clock error 、 Ephemeris error 、 Ionospheric error 、 Tropospheric error, etc ; The second part is the propagation delay error that cannot be measured by the user or calculated by the correction model ; The third part is the inherent error of each user receiver , For example, internal noise 、 Channel delay 、 Multipath effect, etc . Using differential technology , The first part of the error can be completely eliminated , Most of the errors in the second part can be eliminated , It mainly depends on the distance between the reference receiver and the user receiver , The third part of the error cannot be eliminated .
According to the difference GPS The information sent by the reference station can be differential GPS Positioning is divided into three categories , namely : Position difference 、 Pseudo range difference and carrier phase difference . The working principle of these three kinds of difference methods is the same , That is, the reference station sends correction data , The user station receives and corrects the measurement results , To obtain accurate positioning results . The difference is , The specific content of sending correction data is different , Its differential positioning accuracy is also different .
1. Position difference principle ( A little )
This is the simplest difference method , Any kind of GPS The receiver can be refitted and composed of this differential system . Installed on the reference station GPS Receiver observation 4 Three dimensional positioning can be carried out after a satellite , Calculate the coordinates of the reference station . Due to orbital errors 、 Clock error 、SA influence 、 Atmospheric effects 、 Multipath effect and other errors , The calculated coordinates are different from the known coordinates of the reference station , There is an error . The reference station uses the data link to send the correction number , Received by the subscriber station , And the user station coordinates solved by it are corrected .
Finally, the corrected user coordinates have eliminated the common error between the reference station and the user station , For example, satellite orbit error 、 SA influence 、 Atmospheric impact, etc , The positioning accuracy is improved . The above prerequisite is the observation of the same group of satellites by the base station and the user station . The position difference method is suitable for the distance between the user and the reference station 100km Within the .
2. Pseudo range difference principle (DGPS)
At present, it is most widely used .
The receiver at the reference station requires its distance to the visible satellite , The calculated distance is compared with the measured value with error . Using a α-β The filter filters the difference and calculates its deviation . Then the ranging errors of all satellites are transmitted to the user , The user uses this ranging error to correct the measured pseudo range . Last , The user uses the corrected pseudo range to solve his own position , The public error can be eliminated , Improve positioning accuracy .
Similar to position difference , The pseudo range difference can offset the common error of the two stations , However, with the increase of the distance from the user to the reference station, there is a systematic error , This error cannot be eliminated by any difference method . The distance between the user and the reference station has a decisive impact on the accuracy . Using pseudo range difference method , The positioning accuracy can reach sub meter level .
3. Carrier phase difference principle (RTK)( a key )
It is a difference method for real-time processing the carrier phase observation of two measurement base stations , Send the carrier phase collected by the reference station to the user receiver , Calculate the difference and calculate the coordinates .RTK Technology can provide three-dimensional coordinates of observation points in real time , And reach cm Class high accuracy .
RTK Positioning principle : Will be located on the reference station GPS Satellite data observed by the receiver , Through the data communication link ( Radio station ) Send it out in real time , And the mobile station located nearby GPS While observing the satellite, the receiver , It also receives radio signals from the reference station , Through the real-time processing of the received signal ( That is, the same error term is eliminated by difference ), Give the three-dimensional coordinates of the mobile station , And estimate its accuracy .
utilize RTK When measuring , At least two sets are equipped GPS Receiver , One is fixed on the reference station , The other is used as a mobile station for point measurement . There is also a data communication link between the two receivers , Send the observation data on the base station to the mobile station in real time . For the data received by the mobile station ( Satellite signal and reference station signal ) Real time processing also requires RTK Software , It mainly completes the solution of double difference ambiguity 、 Solution of baseline vector 、 Coordinate conversion .
RTK Technology can achieve centimeter level positioning accuracy in a very short time , It is widely used in mapping control measurement 、 Construction setting out 、 Engineering survey, topographic survey and other fields . but RTK There are also some disadvantages , It is mainly manifested in the need to set up local reference stations , The error increases with the distance from the mobile station to the reference station .
This benchmark station can be built by itself , And then through UHF/4G Wait to establish contact with mobile devices , Suitable for use in fixed positions . If you travel long distances , You need to consider cross domain resource sharing (CORS,cross-origin resource sharing), Most of them are used in China Chihiro position .
Chihiro position
Chihiro location provides the largest range of accurate positioning services in the country . Currently used by the public in the United States GPS The accuracy of navigation and positioning is 5-10 Meter scale , And compatible with Beidou /GPS The positioning accuracy of dual-mode public navigation terminals is also mostly 3-5 Rice or so , Chihiro position through the foundation reinforcement system , The positioning accuracy can be improved to centimeter level 、 Even static millimeter level .
Positioning principle : Chihiro position and GPS It's a different concept .GPS Mainly through satellite to locate , There is no positioning enhancement system , Due to the error of signal propagation , So the positioning accuracy is at the meter level ; Chihiro set up base stations in various regions , The main purpose of the base station is to modify the information error sent by the satellite , Make the positioning more accurate . Therefore, Chihiro position needs to cooperate with satellites to complete accurate positioning ; The accuracy level is at the centimeter level .
After the Chihiro Zhicun set meal is bought , There are two ways to use it :
(1)appkey+appsecret( secret key ), Use the official SDK Development is relatively convenient ;
(2) Self set differential account + password , Used in general equipment such as 4G DTU in .
If you want to develop your own hardware or write code, just see SDK Integration Guide , Want to buy another house directly 4G DTU Then use , See the differential account Guide .
For the second, use a differential account + Differential password , Directly buy hardware developed by other manufacturers, such as 4G DTU, Generally single chip microcomputer +4G Module made it , It's all realized Ntrip Protocol to communicate , Insert a mobile phone card / IOT card , Set it slightly , It can be used when connected with inertial navigation , Several options are set as follows :
① Address domain name :rtk.ntrip.qxwz.com or IP(60.205.8.49)
② port
port :8001 Corresponding coordinate frame ITRF2008 Reference epoch 2016.0
port :8002 Corresponding coordinate frame WGS84 Reference epoch 2005.0
port :8003 Corresponding coordinate frame CGCS2000 Reference epoch 2000.0
③mountpoint/ Source / Mount point
RTCM32_GGB or RTCM30_GG
④ Differential account number
⑤ Differential code
Reference link
边栏推荐
- Pelosi: Congress will soon have legislation against members' stock speculation
- Flask learning and project practice 9: WTF form verification
- Codeforces Global Round 19
- Suggestions for new engineer team members
- SWC introduction
- Multi project programming minimalist use case
- Quick sort function in C language -- qsort
- svg拖动点裁剪图片js特效
- JS music online playback plug-in vsplayaudio js
- Svg drag point crop image JS effect
猜你喜欢

随机推荐
Pytorch基础——(1)张量(tensor)的初始化
下一个行业风口:NFT 数字藏品,是机遇还是泡沫?
February 14, 2022 Daily: Google long article summarizes the experience of building four generations of TPU
JS Vanke banner rotation chart JS special effect
2.13 weekly report
Precautions for single chip microcomputer anti reverse connection circuit
Suggestions for new engineer team members
2.2 STM32 GPIO operation
Computer graduation project asp Net fitness management system VS development SQLSERVER database web structure c programming computer web page source code project
How do we make money in agriculture, rural areas and farmers? 100% for reference
Python implementation of maddpg - (1) openai maddpg environment configuration
How to choose PLC and MCU?
Brush questions in summer -day3
真机无法访问虚拟机的靶场,真机无法ping通虚拟机
暑期刷题-Day3
User perceived monitoring experience
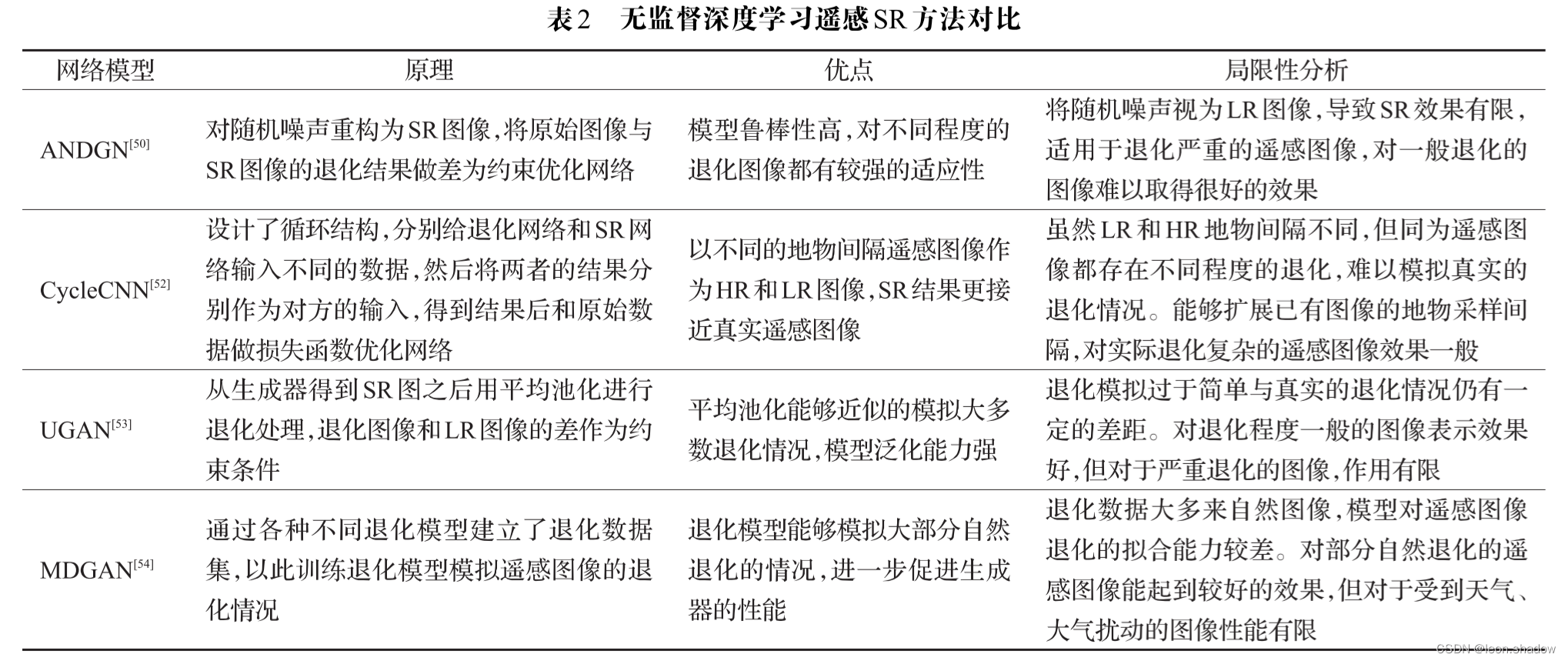
Remote Sensing Image Super-resolution and Object Detection: Benchmark and State of the Art
Overview of super-resolution reconstruction of remote sensing images
IPv6 comprehensive experiment
Tomb. Weekly update of Finance (February 7 - February 13)