当前位置:网站首页>施努卡:视觉定位系统 视觉定位系统的工作原理
施努卡:视觉定位系统 视觉定位系统的工作原理
2022-07-06 03:18:00 【施努卡机器视觉】
视觉引导与定位是工业机器人应用领域中广泛存在的问题。对于工作在自动化生产线上的工业机器人来说,其完成最多的一类操作是”抓取—放置“动作,为了完成这类操作,对被操作物体定位信息的获取是必要的,首先机器人抓取必须知道物体被操作作前的位置,其次是必须知道物体被操作后的目标位置,以保证机器人准确地完成任务。

在大部分地工业机器人应用场合中,机器人只是按照固定地程序进行操作的,物体是初始位置和终止位置是事先规定好的,为了高质量的作业,就要求生产线相对固定,定位精度高,这样的结果是生产柔性下降,成本就大大增加,此时生产线的柔性和产品质量是矛盾的。
在机械手应用的项目中,最核心的是视觉引导定位系统,主要包括动态跟总定位、精准定位装配、精准位置调整等技术,随着经济发展与人民生活水平的提高,物流行业有了长足的发展并产生了迫切的自动化应用需求。
施努卡(SCHNOKA)成立于2010年,先后在上海,苏州及武汉建立了分公司。国家高新技术企业,致力于打造面向智能产线与智慧工厂最强控制大脑的高科技公司。公司围绕感知&识别核心技术构建智能装备,基于机器人视觉算法与单机器人工作站、多机器人群体共融、行业定制化应用。打造产品体系,面向智能生产线、智慧物流等场景实现软件定义智能。
SCHNOKA (施努卡)在3D机器视觉算法、机器人柔性控制、手眼协同融合、产线级机器人协同、工厂级智能规划与调度等方面均由领先技术和行业落地应用,在汽车工业智能分拣产线、大尺寸高精度三维量测、大场景物流搬运机器人智能分拣等方面有丰富的项目经验。
SCHNOKA(施努卡)的多个核心产品汽车工业标杆生产线、锂电新能源灯塔工厂、工程机械智慧工厂、智慧物流等多个领域多个场景应用落地。已经和百亚国际、稳健医疗、米老头集团、维达纸业、一汽大众、上汽大众、沃尔沃汽车、奇瑞捷豹路虎、吉利汽车、长安汽车、上汽通用五菱、长城蜂巢新能源、三一重工、中航工业沈飞、中隧集团、西门子高压开关、中国中车、ABB(中国)等国内外知名企业建立了良好的伙伴合作关系,获得头部客户广泛好评。
边栏推荐
- StrError & PERROR use yyds dry inventory
- Princeton University, Peking University & UIUC | offline reinforcement learning with realizability and single strategy concentration
- Analyze menu analysis
- Inherit day01
- Leetcode problem solving -- 173 Binary search tree iterator
- NR modulation 1
- SD卡報錯“error -110 whilst initialising SD card
- Redis cache breakdown, cache penetration, cache avalanche
- Leetcode problem solving -- 98 Validate binary search tree
- MADDPG的pythorch实现——(1)OpenAI MADDPG环境配置
猜你喜欢

Mysqldump data backup

Research on cooperative control of industrial robots
![[ruoyi] set theme style](/img/e9/6a6b7113faed16c3b439230806320b.png)
[ruoyi] set theme style
IPv6 jobs
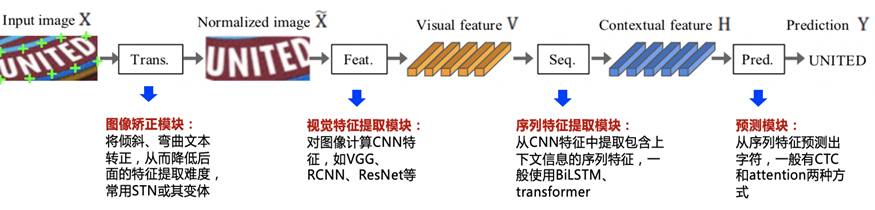
Overview of OCR character recognition methods
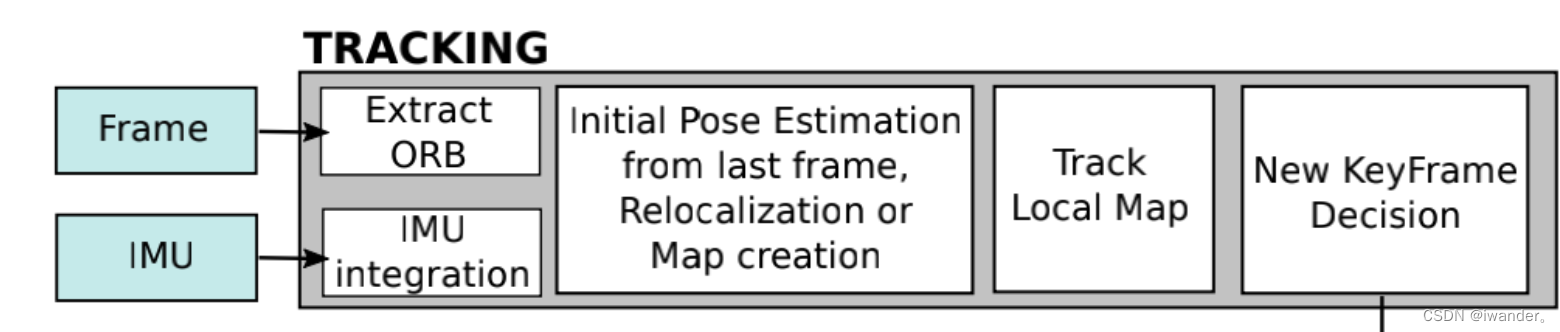
【SLAM】ORB-SLAM3解析——跟踪Track()(3)
![[pointer training - eight questions]](/img/fd/1aa3937548a04078c4d7e08198c3a8.png)
[pointer training - eight questions]
MADDPG的pythorch实现——(1)OpenAI MADDPG环境配置
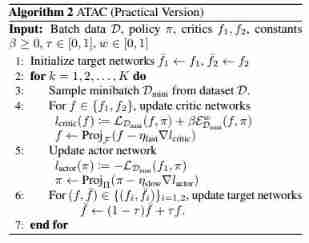
Microsoft Research, UIUC & Google research | antagonistic training actor critic based on offline training reinforcement learning
1.16 - 校验码
随机推荐
八道超经典指针面试题(三千字详解)
Is there a completely independent localization database technology
蓝色样式商城网站页脚代码
MADDPG的pythorch实现——(1)OpenAI MADDPG环境配置
SAP ALV颜色代码对应颜色(整理)
Modeling specifications: naming conventions
Explore pointers and pointer types in depth
Some problem records of AGP gradle
What is the investment value of iFLYTEK, which does not make money?
canvas切积木小游戏代码
Jenkins basic knowledge ----- detailed explanation of 03pipeline code
mysqldump数据备份
I sorted out a classic interview question for my job hopping friends
Redis cache breakdown, cache penetration, cache avalanche
Derivation of anti Park transform and anti Clarke transform formulas for motor control
Map sorts according to the key value (ascending plus descending)
How to write compile scripts compatible with arm and x86 (Makefile, cmakelists.txt, shell script)
Self made CA certificate and SSL certificate using OpenSSL
【SLAM】ORB-SLAM3解析——跟踪Track()(3)
建模规范:命名规范