当前位置:网站首页>Interesting practice of robot programming 14 robot 3D simulation (gazebo+turtlebot3)
Interesting practice of robot programming 14 robot 3D simulation (gazebo+turtlebot3)
2022-07-05 01:28:00 【zhangrelay】
Before , Introduces the node 、 The theme 、 Basic concepts of service and action , as well as rqt and rosbag2 Tools such as .
Using the official version of the two-dimensional environment , Now let's play with a more realistic 3D simulation environment .
- Simulation software Gazebo
- robot TurtleBot3
TurtleBot3 Support simulation development environment , It can be programmed and developed with virtual robot in simulation . There are two development environments that can do this , One is to use a device with 3D Visualization tools RViz False nodes of , The other is to use 3D Robot simulator Gazebo.
- Pseudo nodes are suitable for testing with robot models and motions , But it doesn't support sensors .
- If it is necessary to carry out SLAM Or navigation ,Gazebo It's going to be a viable solution , Because it supports IMU、LDS And cameras and other sensors .
Environment configuration
# TURTLEBOT3_MODEL
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:/home/zhangrelay/RobSoft/turtlebot3/src/simulations/turtlebot3_gazebo/models
export TURTLEBOT3_MODEL=burger
# ROS2
source /opt/ros/foxy/setup.bash
#colcon
source /usr/share/colcon_cd/function/colcon_cd.sh
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
Source code compilation
have access to deb Direct installation :
- sudo apt install ros-foxy-turtlebot3-gazebo
Pay attention to the whole bag .
here , Use source code to compile as follows :
- colcon build
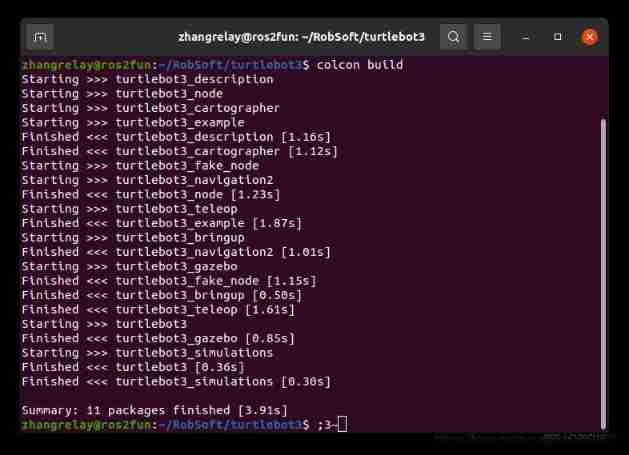
The list of feature packs is shown above .
Simulation practice
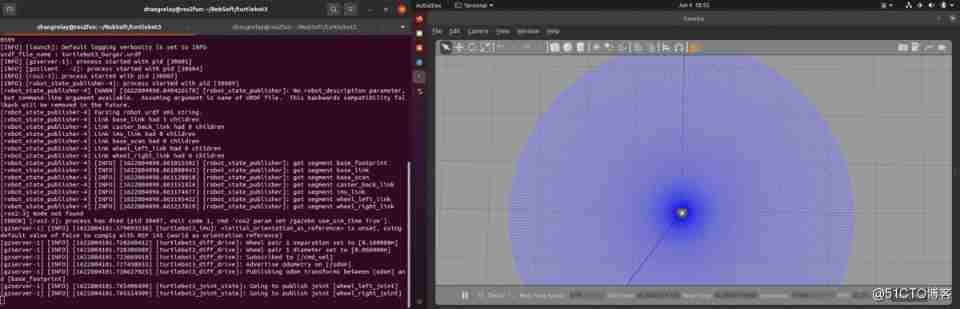
1 Startup environment
- ros2 launch turtlebot3_gazebo empty_world.launch.py
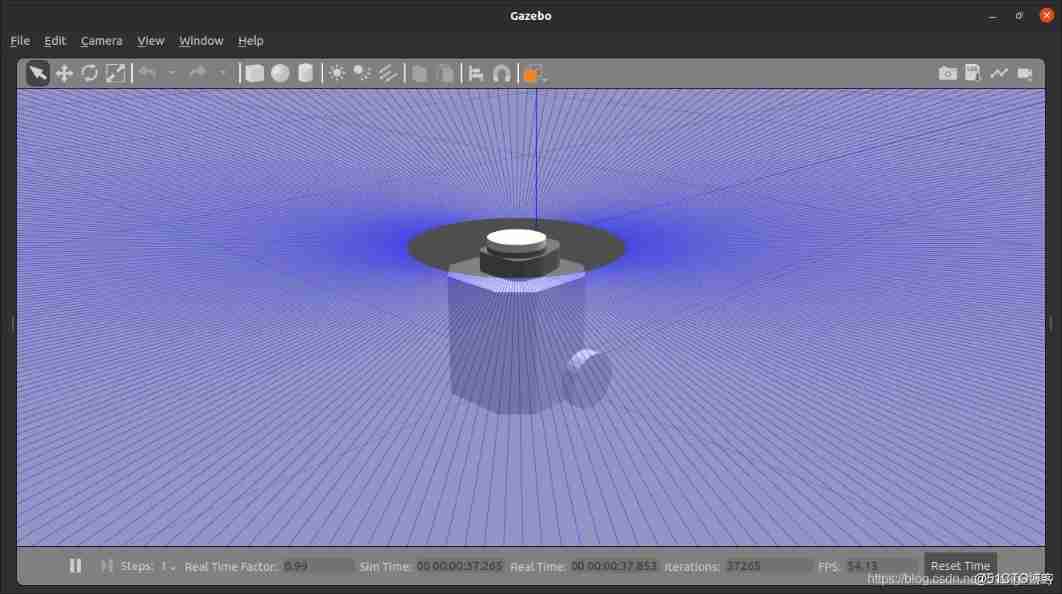
The blue ray is the visualization of the laser .
empty_world.launch The code is as follows :
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import ExecuteProcess
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import LaunchConfiguration
TURTLEBOT3_MODEL = os.environ['TURTLEBOT3_MODEL']
def generate_launch_description():
use_sim_time = LaunchConfiguration('use_sim_time', default='True')
world_file_name = 'empty_worlds/' + TURTLEBOT3_MODEL + '.model'
world = os.path.join(get_package_share_directory('turtlebot3_gazebo'),
'worlds', world_file_name)
launch_file_dir = os.path.join(get_package_share_directory('turtlebot3_gazebo'), 'launch')
pkg_gazebo_ros = get_package_share_directory('gazebo_ros')
return LaunchDescription([
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(pkg_gazebo_ros, 'launch', 'gzserver.launch.py')
),
launch_arguments={'world': world}.items(),
),
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(pkg_gazebo_ros, 'launch', 'gzclient.launch.py')
),
),
ExecuteProcess(
cmd=['ros2', 'param', 'set', '/gazebo', 'use_sim_time', use_sim_time],
output='screen'),
IncludeLaunchDescription(
PythonLaunchDescriptionSource([launch_file_dir, '/robot_state_publisher.launch.py']),
launch_arguments={'use_sim_time': use_sim_time}.items(),
),
])
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
- 34.
- 35.
- 36.
- 37.
- 38.
- 39.
- 40.
- 41.
- 42.
- 43.
2 Circular motion
Before and before the circular motion of two-dimensional environment instructions are very similar .
- ros2 topic pub --rate 2 /cmd_vel geometry_msgs/msg/Twist "{linear: {x: 1.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.8}}"
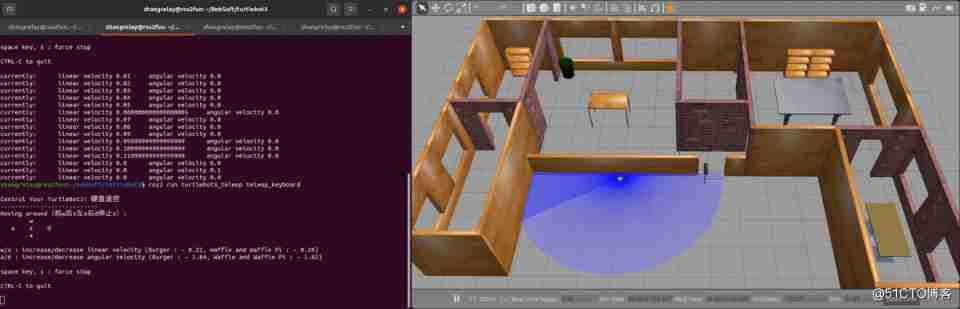
3 Keyboard remote control
Use the following command to start the keyboard remote control :
- ros2 run turtlebot3_teleop teleop_keyboard
The keyboard remote control code is as follows :
import os
import select
import sys
import rclpy
from geometry_msgs.msg import Twist
from rclpy.qos import QoSProfile
if os.name == 'nt':
import msvcrt
else:
import termios
import tty
BURGER_MAX_LIN_VEL = 0.22
BURGER_MAX_ANG_VEL = 2.84
WAFFLE_MAX_LIN_VEL = 0.26
WAFFLE_MAX_ANG_VEL = 1.82
LIN_VEL_STEP_SIZE = 0.01
ANG_VEL_STEP_SIZE = 0.1
TURTLEBOT3_MODEL = os.environ['TURTLEBOT3_MODEL']
msg = """
Control Your TurtleBot3!
---------------------------
Moving around:
w
a s d
x
w/x : increase/decrease linear velocity (Burger : ~ 0.22, Waffle and Waffle Pi : ~ 0.26)
a/d : increase/decrease angular velocity (Burger : ~ 2.84, Waffle and Waffle Pi : ~ 1.82)
space key, s : force stop
CTRL-C to quit
"""
e = """
Communications Failed
"""
def get_key(settings):
if os.name == 'nt':
return msvcrt.getch().decode('utf-8')
tty.setraw(sys.stdin.fileno())
rlist, _, _ = select.select([sys.stdin], [], [], 0.1)
if rlist:
key = sys.stdin.read(1)
else:
key = ''
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
return key
def print_vels(target_linear_velocity, target_angular_velocity):
print('currently:\tlinear velocity {0}\t angular velocity {1} '.format(
target_linear_velocity,
target_angular_velocity))
def make_simple_profile(output, input, slop):
if input > output:
output = min(input, output + slop)
elif input < output:
output = max(input, output - slop)
else:
output = input
return output
def constrain(input_vel, low_bound, high_bound):
if input_vel < low_bound:
input_vel = low_bound
elif input_vel > high_bound:
input_vel = high_bound
else:
input_vel = input_vel
return input_vel
def check_linear_limit_velocity(velocity):
if TURTLEBOT3_MODEL == 'burger':
return constrain(velocity, -BURGER_MAX_LIN_VEL, BURGER_MAX_LIN_VEL)
else:
return constrain(velocity, -WAFFLE_MAX_LIN_VEL, WAFFLE_MAX_LIN_VEL)
def check_angular_limit_velocity(velocity):
if TURTLEBOT3_MODEL == 'burger':
return constrain(velocity, -BURGER_MAX_ANG_VEL, BURGER_MAX_ANG_VEL)
else:
return constrain(velocity, -WAFFLE_MAX_ANG_VEL, WAFFLE_MAX_ANG_VEL)
def main():
settings = None
if os.name != 'nt':
settings = termios.tcgetattr(sys.stdin)
rclpy.init()
qos = QoSProfile(depth=10)
node = rclpy.create_node('teleop_keyboard')
pub = node.create_publisher(Twist, 'cmd_vel', qos)
status = 0
target_linear_velocity = 0.0
target_angular_velocity = 0.0
control_linear_velocity = 0.0
control_angular_velocity = 0.0
try:
print(msg)
while(1):
key = get_key(settings)
if key == 'w':
target_linear_velocity =\
check_linear_limit_velocity(target_linear_velocity + LIN_VEL_STEP_SIZE)
status = status + 1
print_vels(target_linear_velocity, target_angular_velocity)
elif key == 'x':
target_linear_velocity =\
check_linear_limit_velocity(target_linear_velocity - LIN_VEL_STEP_SIZE)
status = status + 1
print_vels(target_linear_velocity, target_angular_velocity)
elif key == 'a':
target_angular_velocity =\
check_angular_limit_velocity(target_angular_velocity + ANG_VEL_STEP_SIZE)
status = status + 1
print_vels(target_linear_velocity, target_angular_velocity)
elif key == 'd':
target_angular_velocity =\
check_angular_limit_velocity(target_angular_velocity - ANG_VEL_STEP_SIZE)
status = status + 1
print_vels(target_linear_velocity, target_angular_velocity)
elif key == ' ' or key == 's':
target_linear_velocity = 0.0
control_linear_velocity = 0.0
target_angular_velocity = 0.0
control_angular_velocity = 0.0
print_vels(target_linear_velocity, target_angular_velocity)
else:
if (key == '\x03'):
break
if status == 20:
print(msg)
status = 0
twist = Twist()
control_linear_velocity = make_simple_profile(
control_linear_velocity,
target_linear_velocity,
(LIN_VEL_STEP_SIZE / 2.0))
twist.linear.x = control_linear_velocity
twist.linear.y = 0.0
twist.linear.z = 0.0
control_angular_velocity = make_simple_profile(
control_angular_velocity,
target_angular_velocity,
(ANG_VEL_STEP_SIZE / 2.0))
twist.angular.x = 0.0
twist.angular.y = 0.0
twist.angular.z = control_angular_velocity
pub.publish(twist)
except Exception as e:
print(e)
finally:
twist = Twist()
twist.linear.x = 0.0
twist.linear.y = 0.0
twist.linear.z = 0.0
twist.angular.x = 0.0
twist.angular.y = 0.0
twist.angular.z = 0.0
pub.publish(twist)
if os.name != 'nt':
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
if __name__ == '__main__':
main()
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
- 34.
- 35.
- 36.
- 37.
- 38.
- 39.
- 40.
- 41.
- 42.
- 43.
- 44.
- 45.
- 46.
- 47.
- 48.
- 49.
- 50.
- 51.
- 52.
- 53.
- 54.
- 55.
- 56.
- 57.
- 58.
- 59.
- 60.
- 61.
- 62.
- 63.
- 64.
- 65.
- 66.
- 67.
- 68.
- 69.
- 70.
- 71.
- 72.
- 73.
- 74.
- 75.
- 76.
- 77.
- 78.
- 79.
- 80.
- 81.
- 82.
- 83.
- 84.
- 85.
- 86.
- 87.
- 88.
- 89.
- 90.
- 91.
- 92.
- 93.
- 94.
- 95.
- 96.
- 97.
- 98.
- 99.
- 100.
- 101.
- 102.
- 103.
- 104.
- 105.
- 106.
- 107.
- 108.
- 109.
- 110.
- 111.
- 112.
- 113.
- 114.
- 115.
- 116.
- 117.
- 118.
- 119.
- 120.
- 121.
- 122.
- 123.
- 124.
- 125.
- 126.
- 127.
- 128.
- 129.
- 130.
- 131.
- 132.
- 133.
- 134.
- 135.
- 136.
- 137.
- 138.
- 139.
- 140.
- 141.
- 142.
- 143.
- 144.
- 145.
- 146.
- 147.
- 148.
- 149.
- 150.
- 151.
- 152.
- 153.
- 154.
- 155.
- 156.
- 157.
- 158.
- 159.
- 160.
- 161.
- 162.
- 163.
- 164.
- 165.
- 166.
- 167.
- 168.
- 169.
- 170.
- 171.
- 172.
- 173.
- 174.
- 175.
- 176.
- 177.
- 178.
- 179.
- 180.
- 181.
- 182.
- 183.
- 184.
- 185.
- 186.
- 187.
- 188.
- 189.
- 190.
- 191.
- 192.
- 193.
- 194.
- 195.
- 196.
- 197.
- 198.
- 199.
- 200.
Easy to add Chinese, easy to use :
It's very important to read the source code .
4 node
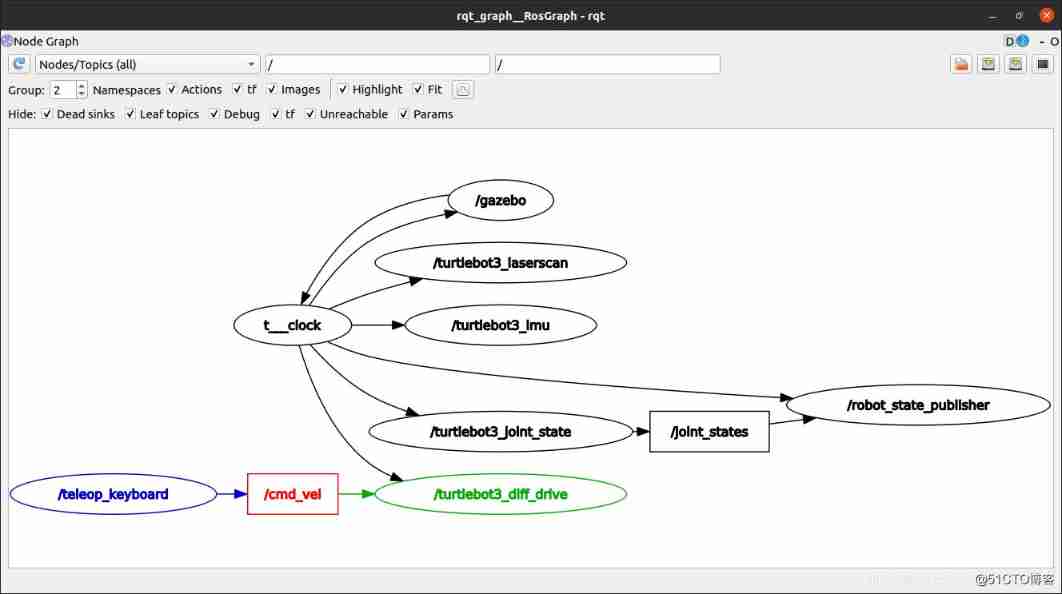
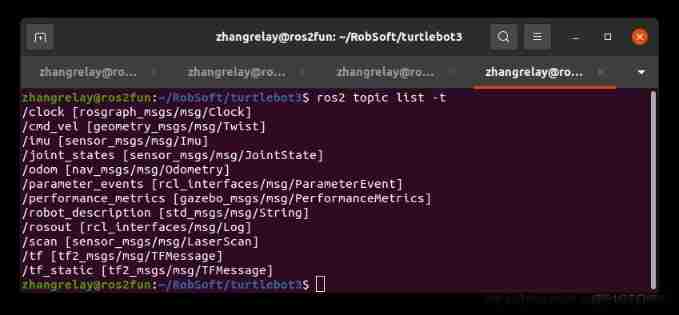
5 The theme
6 service
ros2 service list -t
- /apply_joint_effort [gazebo_msgs/srv/ApplyJointEffort]
- /apply_link_wrench [gazebo_msgs/srv/ApplyLinkWrench]
- /clear_joint_efforts [gazebo_msgs/srv/JointRequest]
- /clear_link_wrenches [gazebo_msgs/srv/LinkRequest]
- /delete_entity [gazebo_msgs/srv/DeleteEntity]
- /gazebo/describe_parameters [rcl_interfaces/srv/DescribeParameters]
- /gazebo/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
- /gazebo/get_parameters [rcl_interfaces/srv/GetParameters]
- /gazebo/list_parameters [rcl_interfaces/srv/ListParameters]
- /gazebo/set_parameters [rcl_interfaces/srv/SetParameters]
- /gazebo/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
- /get_model_list [gazebo_msgs/srv/GetModelList]
- /pause_physics [std_srvs/srv/Empty]
- /reset_simulation [std_srvs/srv/Empty]
- /reset_world [std_srvs/srv/Empty]
- /robot_state_publisher/describe_parameters [rcl_interfaces/srv/DescribeParameters]
- /robot_state_publisher/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
- /robot_state_publisher/get_parameters [rcl_interfaces/srv/GetParameters]
- /robot_state_publisher/list_parameters [rcl_interfaces/srv/ListParameters]
- /robot_state_publisher/set_parameters [rcl_interfaces/srv/SetParameters]
- /robot_state_publisher/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
- /rqt_gui_py_node_4338/describe_parameters [rcl_interfaces/srv/DescribeParameters]
- /rqt_gui_py_node_4338/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
- /rqt_gui_py_node_4338/get_parameters [rcl_interfaces/srv/GetParameters]
- /rqt_gui_py_node_4338/list_parameters [rcl_interfaces/srv/ListParameters]
- /rqt_gui_py_node_4338/set_parameters [rcl_interfaces/srv/SetParameters]
- /rqt_gui_py_node_4338/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
- /spawn_entity [gazebo_msgs/srv/SpawnEntity]
- /teleop_keyboard/describe_parameters [rcl_interfaces/srv/DescribeParameters]
- /teleop_keyboard/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
- /teleop_keyboard/get_parameters [rcl_interfaces/srv/GetParameters]
- /teleop_keyboard/list_parameters [rcl_interfaces/srv/ListParameters]
- /teleop_keyboard/set_parameters [rcl_interfaces/srv/SetParameters]
- /teleop_keyboard/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
- /turtlebot3_diff_drive/describe_parameters [rcl_interfaces/srv/DescribeParameters]
- /turtlebot3_diff_drive/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
- /turtlebot3_diff_drive/get_parameters [rcl_interfaces/srv/GetParameters]
- /turtlebot3_diff_drive/list_parameters [rcl_interfaces/srv/ListParameters]
- /turtlebot3_diff_drive/set_parameters [rcl_interfaces/srv/SetParameters]
- /turtlebot3_diff_drive/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
- /turtlebot3_imu/describe_parameters [rcl_interfaces/srv/DescribeParameters]
- /turtlebot3_imu/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
- /turtlebot3_imu/get_parameters [rcl_interfaces/srv/GetParameters]
- /turtlebot3_imu/list_parameters [rcl_interfaces/srv/ListParameters]
- /turtlebot3_imu/set_parameters [rcl_interfaces/srv/SetParameters]
- /turtlebot3_imu/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
- /turtlebot3_joint_state/describe_parameters [rcl_interfaces/srv/DescribeParameters]
- /turtlebot3_joint_state/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
- /turtlebot3_joint_state/get_parameters [rcl_interfaces/srv/GetParameters]
- /turtlebot3_joint_state/list_parameters [rcl_interfaces/srv/ListParameters]
- /turtlebot3_joint_state/set_parameters [rcl_interfaces/srv/SetParameters]
- /turtlebot3_joint_state/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
- /turtlebot3_laserscan/describe_parameters [rcl_interfaces/srv/DescribeParameters]
- /turtlebot3_laserscan/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
- /turtlebot3_laserscan/get_parameters [rcl_interfaces/srv/GetParameters]
- /turtlebot3_laserscan/list_parameters [rcl_interfaces/srv/ListParameters]
- /turtlebot3_laserscan/set_parameters [rcl_interfaces/srv/SetParameters]
- /turtlebot3_laserscan/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
- /unpause_physics [std_srvs/srv/Empty]
7 action
SLAM And navigation .
8 more
Please refer to the previous 13 The corresponding cases in this article , Practice in this 3D environment .
summary
From two-dimensional environment to three-dimensional environment , Simulation is more cool , But the principles and instructions are almost the same , Learn one move and take control !
边栏推荐
- If the consumer Internet is compared to a "Lake", the industrial Internet is a vast "ocean"
- PHP 基础篇 - PHP 中 DES 加解密详解
- batchnorm.py这个文件单GPU运行报错解决
- Daily question brushing record (13)
- 微信小程序:全新独立后台月老办事处一元交友盲盒
- 流批一體在京東的探索與實踐
- Database postragesql client authentication
- Arbitrum:二维费用
- Database postragesql client connection default
- PHP 约瑟夫环问题
猜你喜欢
To sort out messy header files, I use include what you use

Wechat applet: wechat applet source code download new community system optimized version support agent member system function super high income
What happened to those who focused on automated testing?
整理混乱的头文件,我用include what you use
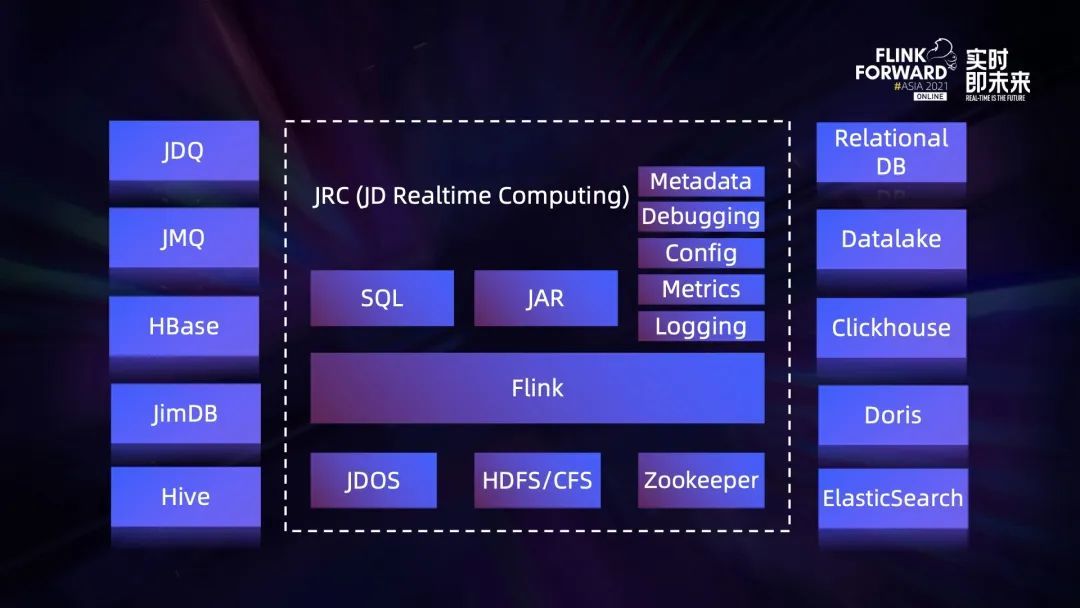
流批一体在京东的探索与实践
Exploration and practice of integration of streaming and wholesale in jd.com

Game 280 of leetcode week
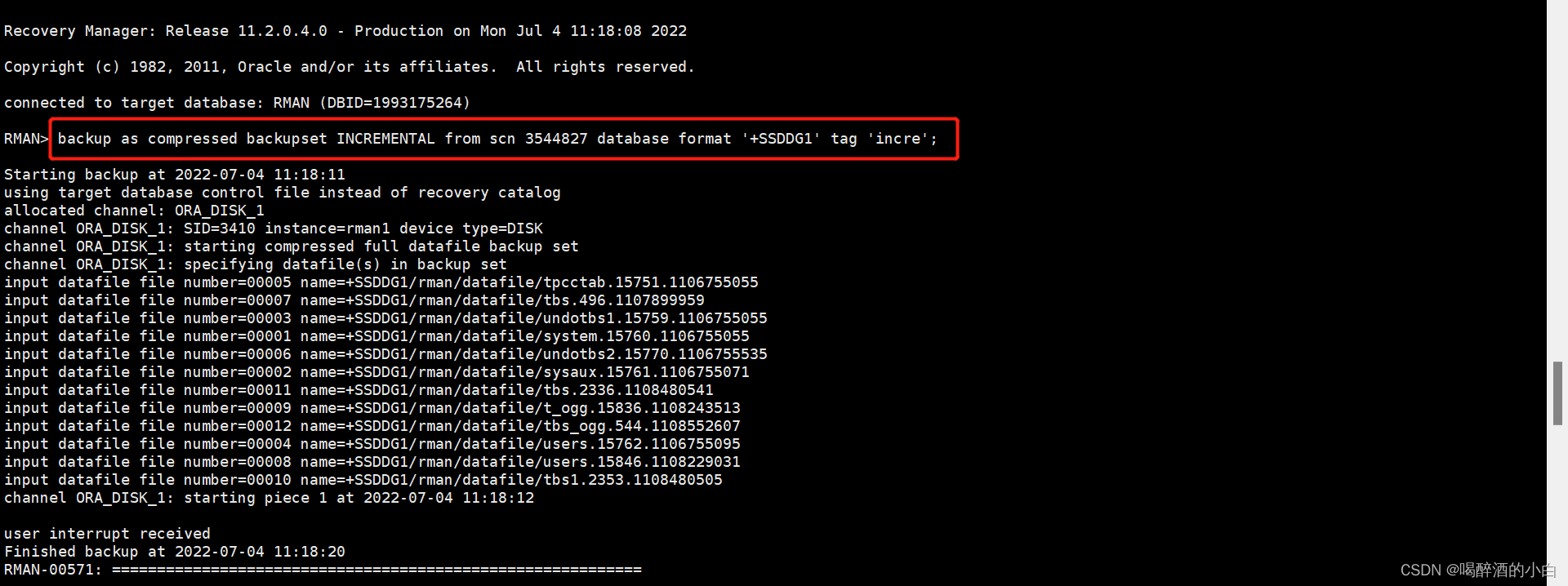
增量备份 ?db full
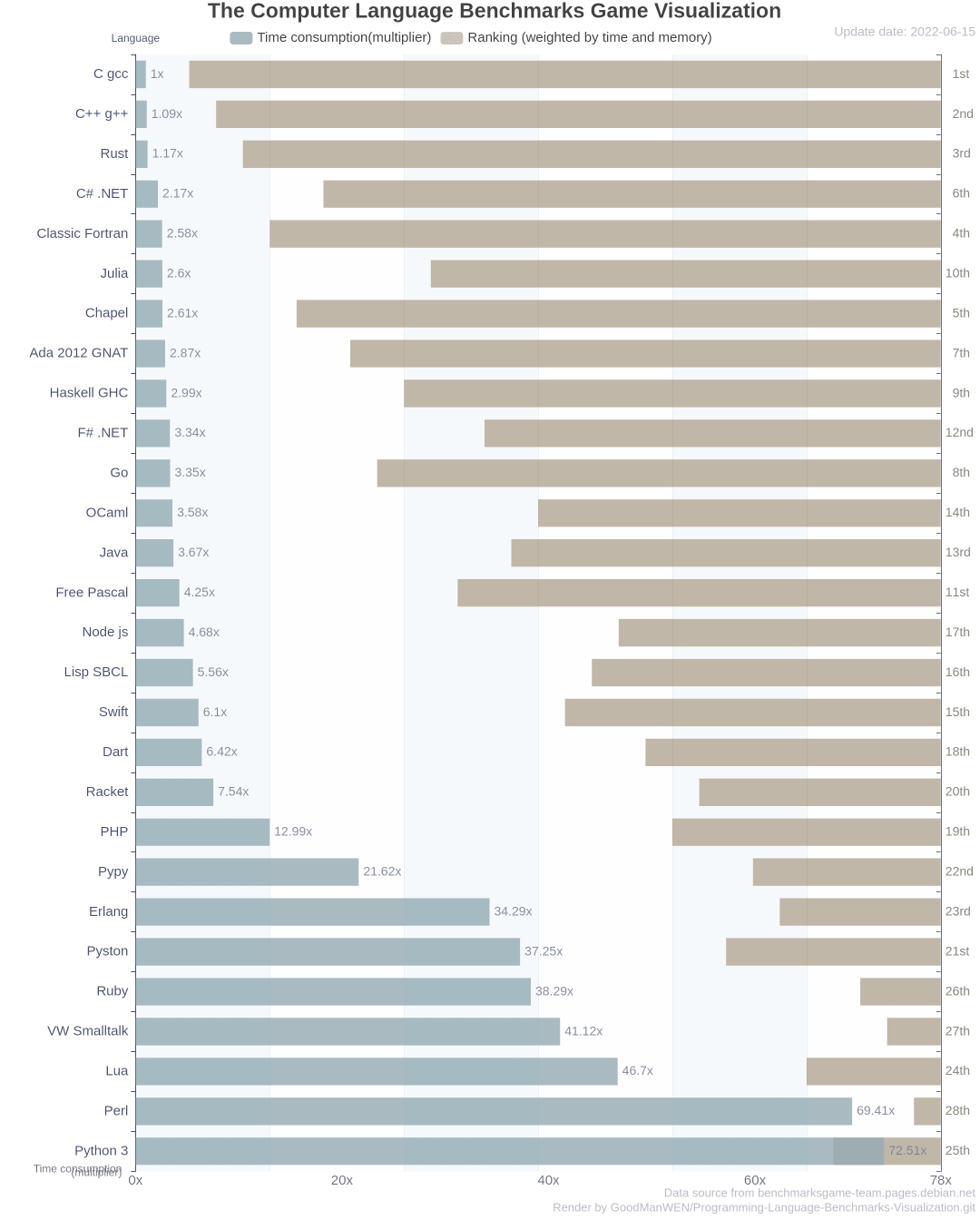
The performance of major mainstream programming languages is PK, and the results are unexpected

Four pits in reentrantlock!
随机推荐
What is the current situation and Prospect of the software testing industry in 2022?
MySQL regexp: Regular Expression Query
es使用collapseBuilder去重和只返回某个字段
当产业互联网时代真正发展完善之后,将会在每一个场景见证巨头的诞生
Wechat applet: independent background with distribution function, Yuelao office blind box for making friends
BGP comprehensive experiment
JS implementation determines whether the point is within the polygon range
SAP ui5 application development tutorial 107 - trial version of SAP ui5 overflow toolbar container control introduction
Hand drawn video website
Basic operations of database and table ----- create index
Great God developed the new H5 version of arXiv, saying goodbye to formula typography errors in one step, and mobile phones can also easily read literature
微信小程序:全网独家小程序版本独立微信社群人脉
Global and Chinese market of portable CNC cutting machines 2022-2028: Research Report on technology, participants, trends, market size and share
Wechat applet: exclusive applet version of the whole network, independent wechat community contacts
Database postragesql client connection default
Talking about JVM 4: class loading mechanism
Yyds dry goods inventory kubernetes management business configuration methods? (08)
Database postragesql lock management
Global and Chinese market of nutrient analyzer 2022-2028: Research Report on technology, participants, trends, market size and share
Roads and routes -- dfs+topsort+dijkstra+ mapping