当前位置:网站首页>Autoware--Beike Tianhui rfans lidar uses the camera & lidar joint calibration file to verify the fusion effect of point cloud images
Autoware--Beike Tianhui rfans lidar uses the camera & lidar joint calibration file to verify the fusion effect of point cloud images
2022-08-05 06:18:00 【cql_cqu】
边栏推荐
- 运维的高光时刻,从智能化开始
- LinkSLA insists that users come first and creates a sustainable operation and maintenance service plan
- Tencent Cloud Message Queue CMQ
- Spark source code-task submission process-6.1-sparkContext initialization-create spark driver side execution environment SparkEnv
- VRRP概述及实验
- Small example of regular expression--validate email address
- sql server 重复值在后面计数
- time complexity and space complexity
- Hard Disk Partitioning and Permanent Mounting
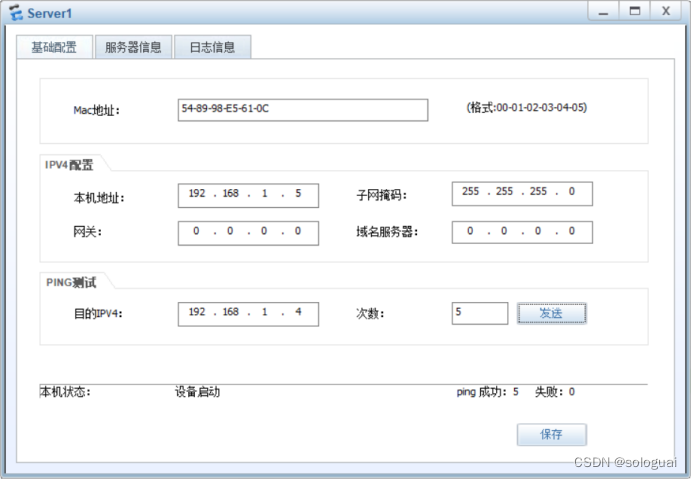
- Network wiring and digital-to-system conversion
猜你喜欢
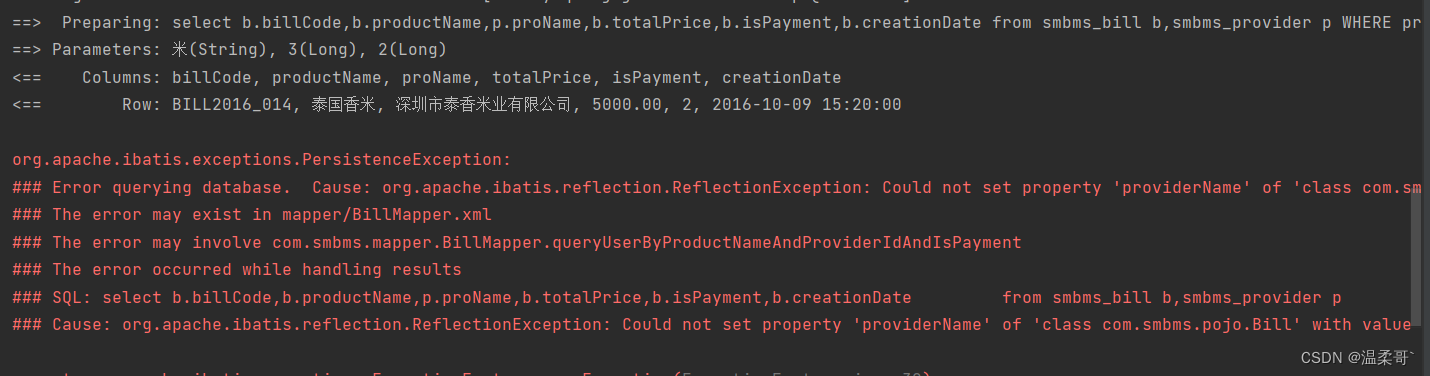
错误类型:反射。ReflectionException:无法设置属性“xxx”的“类”xxx”与价值“xxx”

Network wiring and digital-to-system conversion
【Machine Learning】1 Univariate Linear Regression

ALC实验
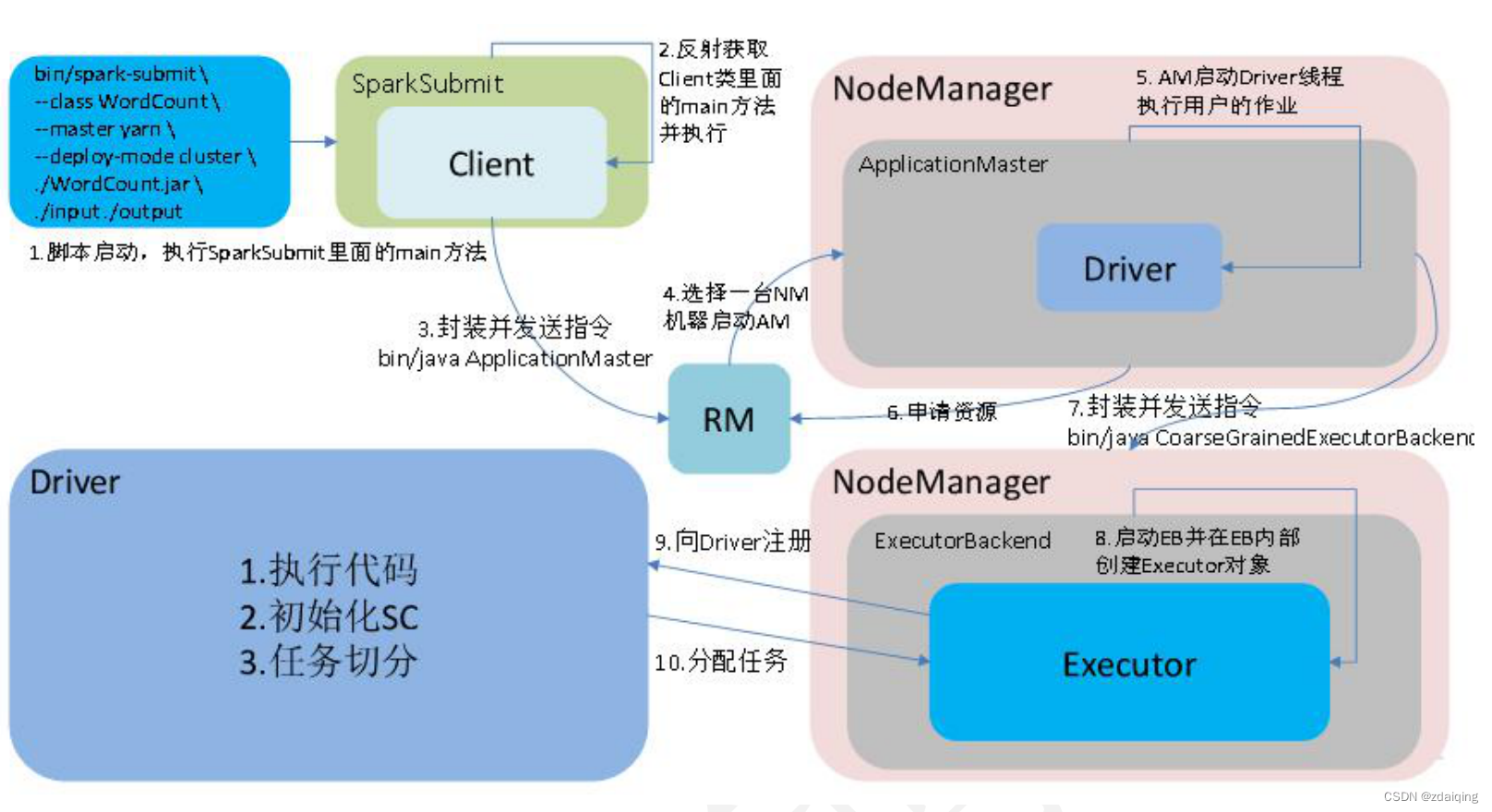
spark source code - task submission process - 1-sparkSubmit
VLAN介绍与实验

运维的高光时刻,从智能化开始
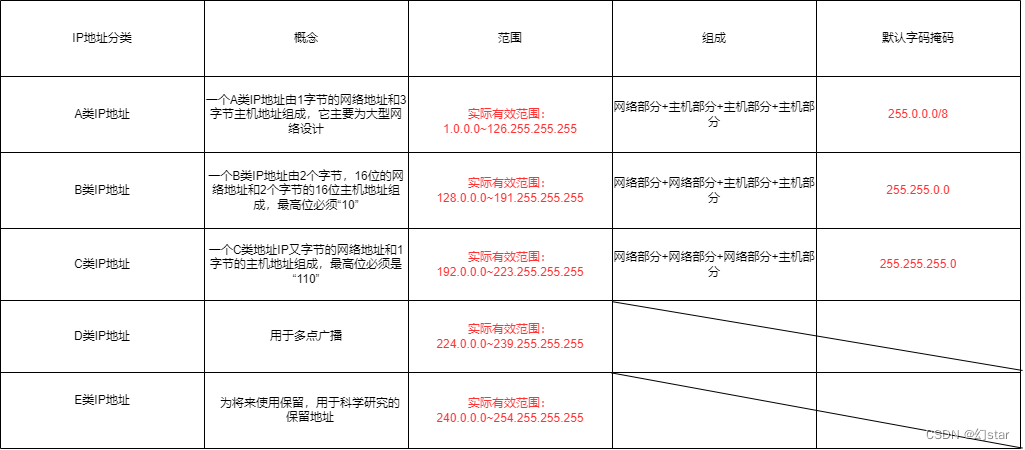
IP地址及子网的划分
One-arm routing and 30% switch
干货!教您使用工业树莓派结合CODESYS配置EtherCAT主站
随机推荐
Technology Sharing Miscellaneous Technologies
NIO works is analysed
Getting Started Documentation 12 webserve + Hot Updates
[Day8] (Super detailed steps) Use LVM to expand capacity
IP address and subnet division
Getting Started Document 01 series in order
网络层协议介绍
TCP/IP four-layer model
【Machine Learning】1 Univariate Linear Regression
CIPU, what impact does it have on the cloud computing industry?
Hugo builds a personal blog
增长:IT运维发展趋势报告
运维工程师,快来薅羊毛
[ingress]-ingress使用tcp端口暴露服务
spark source code - task submission process - 1-sparkSubmit
spark source code - task submission process - 3-ApplicationMaster
RAID磁盘阵列
idea 常用快捷键
spark source code - task submission process - 2-YarnClusterApplication
运维的高光时刻,从智能化开始