当前位置:网站首页>SOC_ SD_ CMD_ FSM
SOC_ SD_ CMD_ FSM
2022-07-05 07:07:00 【Eight four one one】
Catalog
1. State machine flow chart
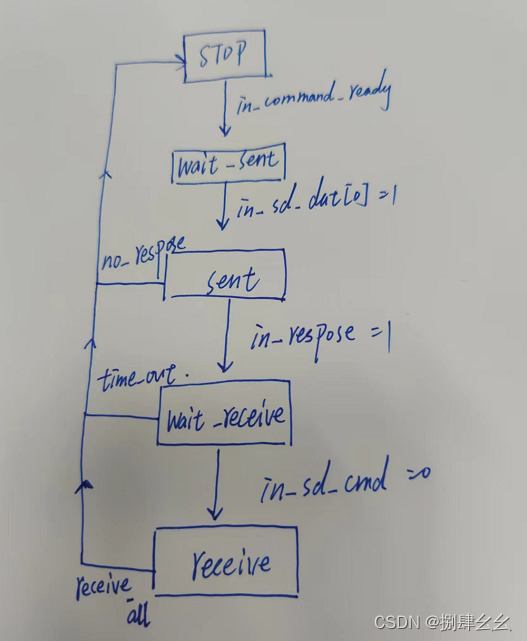
- CMD_STATE_STOP: In my spare time
- CMD_STATE_WAIT_SEND: Waiting to be sent
- CMD_STATE_SEND: In sending
- CMD_STATE_WAIT_RECEIVE: Waiting to receive
- CMD_STATE_RECEIVE: Receiving
2. Interface description
- Clock reset soft reset
- There are two response types ,R2 The response is long in_longresponse, Others are in_response
- Drive the state machine to work in_command_ready The signal
- sd The data signal from the card in_sd_dat And command signals in_sd_cmd
- Send and receive signals to two younger brother modules has_send_bit、has_receive_bit And the current state of the state machine current_state
- Give back sd Card response feedback signal end_command、end_command_and_response、response_timeout
input in_sd_clk;
input in_soft_reset;
input hrst_n;
//sd if
input in_longresponse;
input in_response;
input in_command_ready;
//sd bus (sd card)
input [3:0] in_sd_dat;
input in_sd_cmd;
// Give two younger brother modules
output [2:0] current_state;
output [5:0] has_send_bit;
output [7:0] has_receive_bit;
// return sd if
output end_command;
output end_command_and_response;
output response_timeout;
3. Response digit selection
- Long response R2 yes 136bit, The short response is 48bit
assign need_to_receive_bit = in_longresponse ? 8'd136 : 8'd47; // Use to compare with has received bits
4. Three stage state machine
① The first paragraph describes sub state migration , The default state is CMD_STATE_STOP
always @(posedge in_sd_clk or negedge hrst_n) begin
if(!hrst_n)
current_state <= `CMD_STATE_STOP;
else if (!in_soft_reset)
current_state <= `CMD_STATE_STOP;
else
current_state <= next_state;
end
② The second segment of the state machine , Describe state transition with combinatorial logic , Complete the corresponding transition according to the above state transition diagram
always @(*) begin
case (current_state)
`CMD_STATE_STOP:
if (in_command_ready)
next_state = `CMD_STATE_WAIT_SEND;
else
next_state = current_state;
`CMD_STATE_WAIT_SEND:
if (in_sd_dat[0])
next_state = `CMD_STATE_SEND;
else
next_state = current_state;
`CMD_STATE_SEND:
if (has_send_bit != 47)
next_state = `CMD_STATE_SEND;
else if (!in_response)
next_state = `CMD_STATE_STOP;
else
next_state = `CMD_STATE_WAIT_RECEIVE;
`CMD_SEND_WAITE_RECEIVE:
if(resp_time == 7'b0111111)
next_state = `CMD_STATE_STOP;
else if (!in_sd_cmd)
next_state = `CMD_STATE_RECEIVE;
else
next_state = `CMD_SEND_WAITE_RECEIVE;
`CMD_STATE_RECEIVE:
if(has_receive_bit == (need_to_receive_bit - 1))
next_state = `CMD_STATE_STOP;
else
next_state = `CMD_STATE_RECEIVE;
default: next_state = `CMD_STATE_STOP;
endcase
end
③ The third segment of the state machine , Describe what actions each State performs , It mainly includes the assignment of the following signals
- has_send_bit: Sent bit Count
- receive_bit_counter_en: receive bit Counter enable
- resp_time_counter_en: Wait for the timeout counter to enable
- end_command_and_response: The signal of the end of the whole cycle of the responding command
- end_command: Unresponsive command end signal of the whole cycle
- response_timeout: Wait for the timeout signal
always @(*) begin
case (current_state)
`CMD_STATE_STOP:
begin
has_send_bit = 1'b0;
receive_bit_counter_en = 1'b0;
resp_time_counter_en = 1'b0;
end_command_and_response = 1'b0;
end_command = 1'b0;
response_timeout =1'b0;
end
`CMD_STATE_WAIT_SEND:
begin
has_send_bit = 1'b0;
receive_bit_counter_en = 1'b0;
resp_time_counter_en = 1'b0;
end_command_and_response = 1'b0;
end_command = 1'b0;
response_timeout =1'b0;
end
`CMD_STATE_SEND:
begin
receive_bit_counter_en = 1'b0;
resp_time_counter_en = 1'b0;
end_command_and_response = 1'b0;
end_command = 1'b0;
response_timeout =1'b0;
if (has_send_bit !=47)
begin
send_bit_counter_en = 1'b1;
next_state = `CMD_STATE_SEND;
end
else
begin
if(!in_response)
begin
next_state = `CMD_STATE_STOP;
send_bit_counter_en = 1'b0 ;
end_command_and_response= 1'b1;
end_command = 1'b1;
end
else
begin
next_state =`CMD_STATE_WAIT_RECEIVE;
send_bit_counter_en = 1'b0;
end_command = 1'b1 ;
end
end
end
`CMD_SEND_WAITE_RECEIVE:
begin
end_command = 1'b1;
send_bit_counter_en = 1'b0;
receive_bit_counter_en = 1'b0;
resp_time_counter_en = 1'b0;
end_command_and_response = 1'b0;
response_timeout =1'b0;
if(resp_time == 7'b0111111)
response_timeout = 1'b1;
else if (!in_sd_cmd)
resp_time_counter_en = 1'b0;
else
resp_time_counter_en = 1'b1;
end
`CMD_STATE_RECEIVE:
begin
send_bit_counter_en = 1'b0;
resp_time_counter_en = 1'b0;
end_command = 1'b1;
end_command_and_response = 1'b0;
response_timeout = 1'b0;
if(has_receive_bit == (need_to_receive_bit - 1))
begin
end_command_and_response = 1'b1;
receive_bit_counter_en = 1'b0;
end
else
receive_bit_counter_en = 1'b1;
end
default:
begin
has_send_bit = 1'b0;
receive_bit_counter_en = 1'b0;
resp_time_counter_en = 1'b0;
end_command_and_response = 1'b0;
end_command = 1'b0;
response_timeout =1'b0;
end
endcase
end
5. Corresponding 3 A counter
- Send count
- Receive count
- Timeout count
always @(posedge in_sd_clk or negedge hrst_n) begin
if(!hrst_n)
has_send_bit <= 6'b0;
else if(!in_soft_reset)
has_send_bit <= 6'b0;
else
begin
if(has_send_bit == 47)
has_send_bit <= 6'b0;
else if (send_bit_counter_en == 1'b1)
has_send_bit <= has_send_bit + 1;
end
end
always @(posedge in_sd_clk or negedge hrst_n) begin
if(!hrst_n)
has_receive_bit <= 8'b0;
else if (!in_soft_reset)
has_receive_bit <= 8'b0;
else begin
if(has_receive_bit == (need_to_receive_bit - 1))
has_receive_bit <= 8'b0;
else if (receive_bit_counter_en == 1'b1)
has_receive_bit <= has_receive_bit + 1;
end
end
always @(posedge in_sd_clk or negedge hrst_n) begin
if(!hrst_n)
resp_time <= 7'b0;
else if (!in_soft_reset)
resp_time <= 7'b0;
else if( current_state == `CMD_STATE_RECEIVE)
resp_time <= 7'b0;
else if (resp_time == 63)
resp_time <= 7'b0;
else if (resp_time_counter_en == 1'b1)
resp_time <= resp_time + 1;
end
边栏推荐
- .net core踩坑实践
- Error: "mountvolume.setup failed for volume PVC fault handling
- C语言数组专题训练
- CGroup CPU group source code analysis
- Technical conference arrangement
- [software testing] 06 -- basic process of software testing
- Unity UGUI不同的UI面板或者UI之间如何进行坐标匹配和变换
- Preemption of CFS scheduling
- testing framework
- postmessage通信
猜你喜欢
1290_FreeRTOS中prvTaskIsTaskSuspended()接口实现分析
All English in the code
逻辑结构与物理结构
![[algorithm post interview] interview questions of a small factory](/img/62/6e330b1eba38f2dc67b21a10f0e2a8.jpg)
[algorithm post interview] interview questions of a small factory
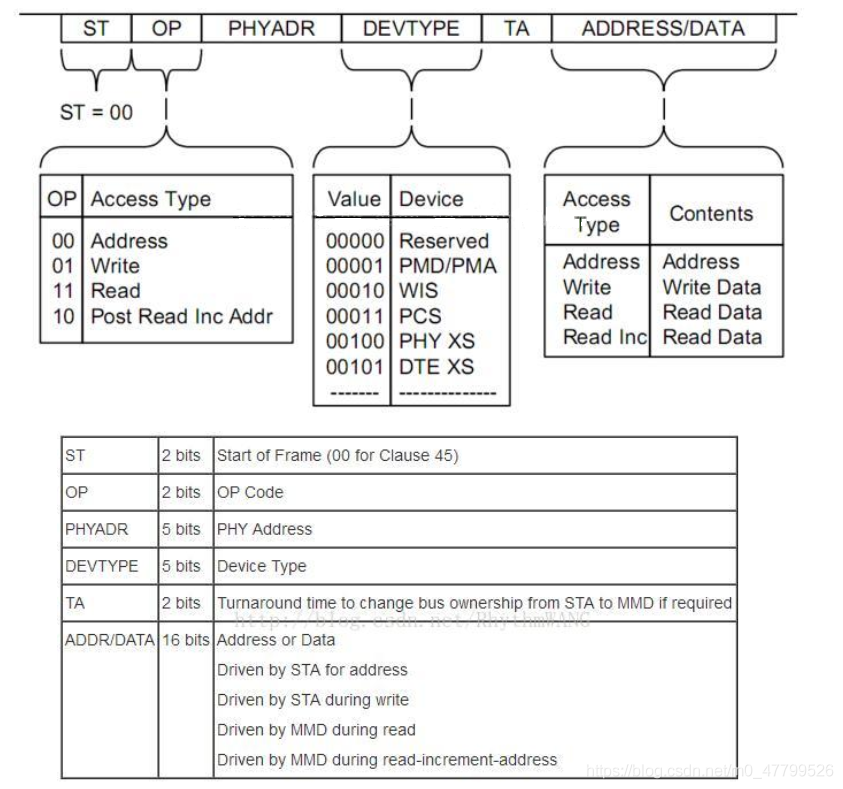
PHY drive commissioning --- mdio/mdc interface Clause 22 and 45 (I)
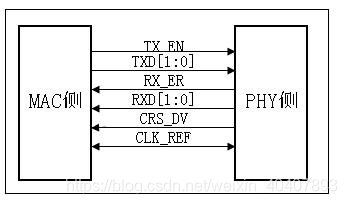
Literacy Ethernet MII interface types Daquan MII, RMII, smii, gmii, rgmii, sgmii, XGMII, XAUI, rxaui
ROS2——topic话题(八)
1290_ Implementation analysis of prvtaskistasksuspended() interface in FreeRTOS
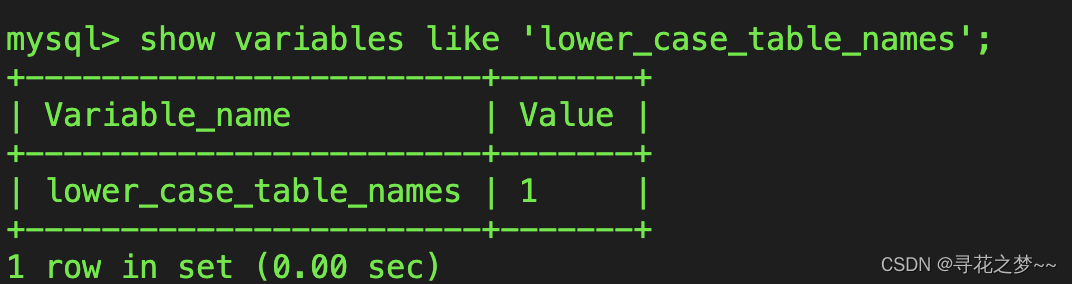
【MySQL8.0不支持表名大写-对应方案】

网易To B,柔外刚中
随机推荐
Sre core system understanding
[software testing] 06 -- basic process of software testing
vim
Orin 安装CUDA环境
SD_CMD_RECEIVE_SHIFT_REGISTER
并发编程 — 如何中断/停止一个运行中的线程?
Interpretation of the earliest sketches - image translation work sketchygan
Ros2 - common command line (IV)
ROS2——配置开发环境(五)
Unity ugui how to match and transform coordinates between different UI panels or uis
Rehabilitation type force deduction brush question notes D1
Special training of C language array
Xiaomi written test real question 1
Qt项目中的日志库log4qt使用
Ros2 - Service Service (IX)
IPage can display data normally, but total is always equal to 0
Database mysql all
The differences and connections among cookies, sessions, JWT, and tokens
1290_FreeRTOS中prvTaskIsTaskSuspended()接口实现分析
Inftnews | drink tea and send virtual stocks? Analysis of Naixue's tea "coin issuance"