当前位置:网站首页>【MagNet】《Progressive Semantic Segmentation》
【MagNet】《Progressive Semantic Segmentation》
2022-07-02 07:48:00 【bryant_ meng】
CVPR-2021
List of articles
1 Background and Motivation
When doing high-resolution image segmentation tasks , because GPU Resource constraints , You can't train the original picture directly
The solution is often downsample the big image or divide the image into local patches for separate processing
However downsample Many details will be lost ,patches The method lacks a holistic view ( Global information )
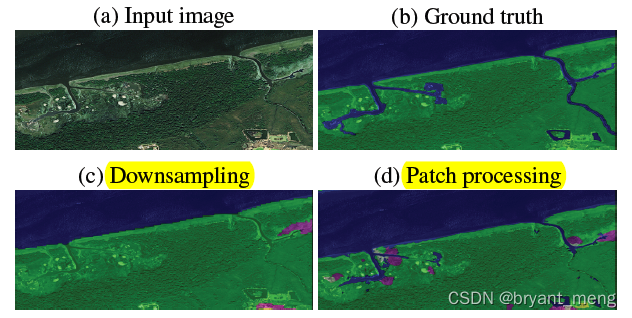
The author combines the advantages of the above two methods , Put forward a multi-scale segmentation framework for high-resolution images——MagNet
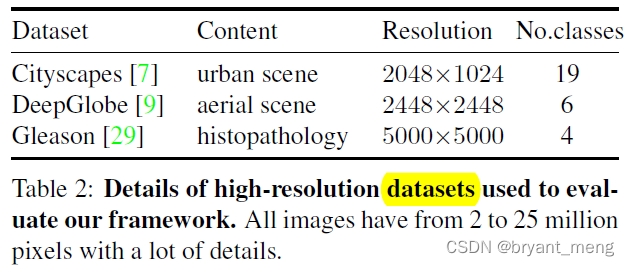
stay Cityscapes / DeepGlobe / Gleason Its effectiveness is verified on three high-resolution image datasets
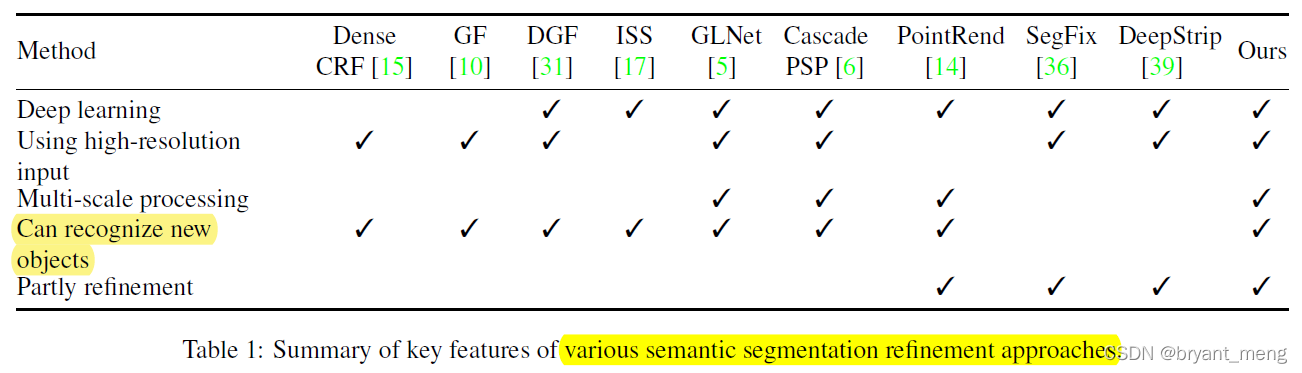
2 Related Work
Multi-scale, eg:FPN / ASPP / HRNet
multi-stage, eg:Auto-ZoomNet
context aggregation,eg:BiseNet
Segmentation refinement
3 Advantages / Contributions
Aiming at the problem of high-resolution image segmentation , Design MagNet The Internet ,Experiments on three high-resolution datasets of urban views, aerial scenes, and medical images show that MagNet consistently outperforms the state-of-theart methods by a significant margin
4 Method
There are two core modules
segmentation network(module, Ordinary partition network )
refinement module( Proposed by the author )
4.1 Multistage processing pipeline

- s Express scale
- p Express patch
- X Represents the input picture
- Y Indicates the output picture
- X ˉ \bar{X} Xˉ Indicates input to segmentation network Medium tensor, Fixed size
- Y ˉ \bar{Y} Yˉ From refinement module The output of the tensor, Fixed size
- O ˉ \bar{O} Oˉ From segmentation network The output of the tensor, Fixed size
With 4 scale As an example
If you input a picture h and w by 1024x2048
each scale Under the patch The size is :
1024x2048
512x1024
256x512
128x256
segmentation and refinement The input and output of the module are 128x256
4.2 Refinement module
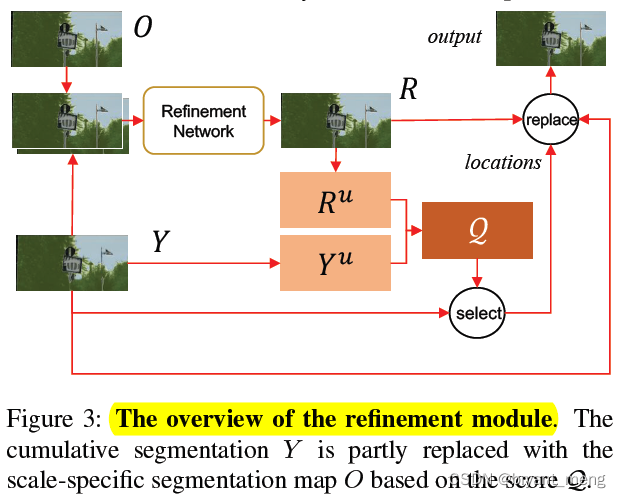
1)refinement module There are two inputs to
- the cumulative result from the previous stages, Y ˉ \bar{Y} Yˉ
- the result obtained by running the segmentation module at and only at the current scale, O ˉ \bar{O} Oˉ
2)refinement network The structure is as follows
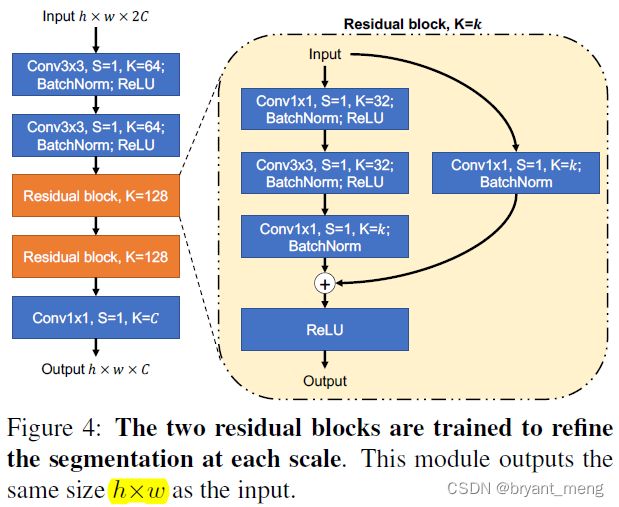
O+Y=R
3) history scale Results and current scale result set

Let Y u Y_u Yu and R u R_u Ru denote the prediction uncertainty maps for Y Y Y and R R R respectively.
4)uncertainty maps For the definition of
for each pixel of Y , the prediction confidence at this location is defined as the absolute difference between the highest probability value and the second-highest value (among the C probability values for C classes).
5) Use two prediction uncertainty maps Choose Y Y Y ( Cumulative segmentation graph ) Of k k k Refine at four locations .

- k k k It means Y Y Y The inaccuracy of prediction , and R R R Where the prediction is more accurate
- ⨀ \bigodot ⨀ yes element-wise multiplication
- F F F Means median filtering , To smooth out the score map
- 1 − R 1-R 1−R Equivalent to attention mechanism , Used to correct Y Y Y Weighted
5) Y u Y_u Yu and R u R_u Ru The combination mode of is 
among F denotes median blurring to smooth the score map( median filtering )
⨀ \bigodot ⨀ yes element-wise multiplication
Is equivalent to R Focus on updating the uncertainties of , The specific understanding is as follows
R R R map Some location The better the classification ,softmax Pull more open , that prediction confidence The bigger it is ,1-R The smaller it is , It means you don't have to go refine The area
R R R map Some location The worse the classification ,softmax cannot pull open , that prediction confidence The smaller it is ,1-R The bigger it is , It means to focus on refine The area
ps: Follow up select and replace It seems that I can't analyze too many details , It needs to be combined with the code
4.3 MagNetFast
stay MagNet On the basis of
- Reduce scale Number
- Reduce each scale Up refine Of patch Number (only selects the patches with the highest prediction uncertainty Y u Y^u Yu for refinement)
5 Experiments
When training, each scale On randomly extract image patches
When it comes to testing ,extract non-overlapping patches for processing
5.1 Datasets
5.2 Experiments on the Cityscapes dataset
1)Benefits of multiple scale levels

scale Set to 4 The best effect
Notice here ,patch size The smaller it is ,refine The higher the accuracy of
patch size In turn (hxw)
1024x2048->512x1024->256x512->128x256
Network size is patch resize The size is 128x256
amount to refine The accuracy of is
Original picture x(128/1024) -> Original picture x(128/512)-> Original picture x(128/256)-> Original picture x(128/128)
That is to say
256->512->1024->2048
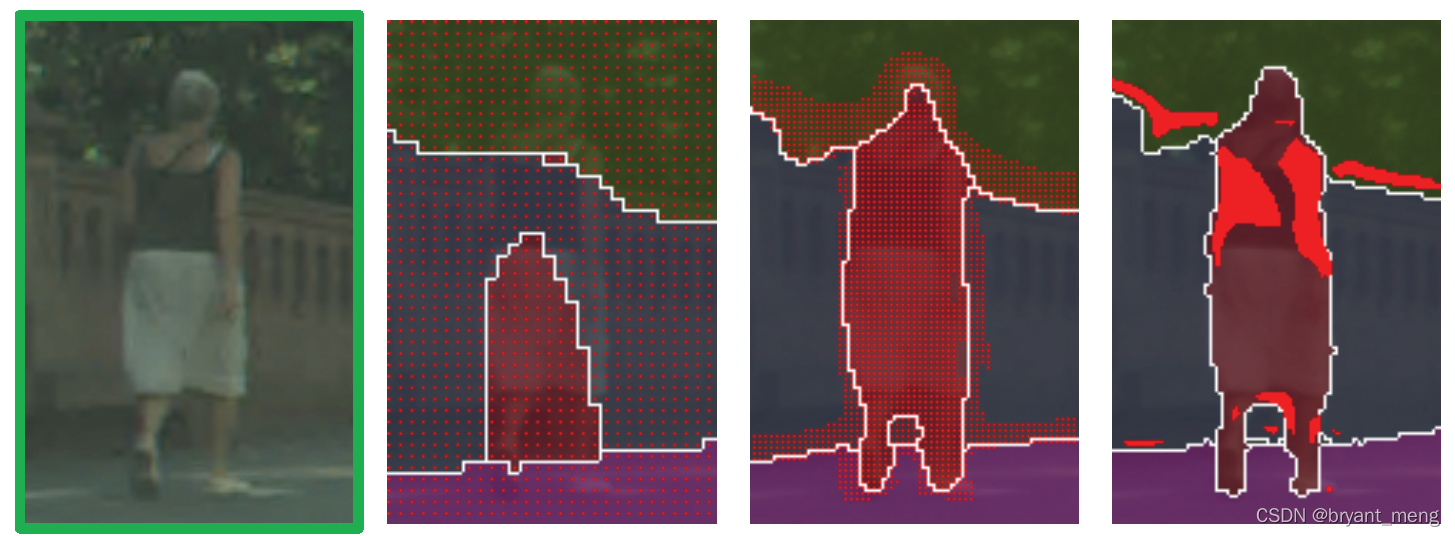
Now feel the effect
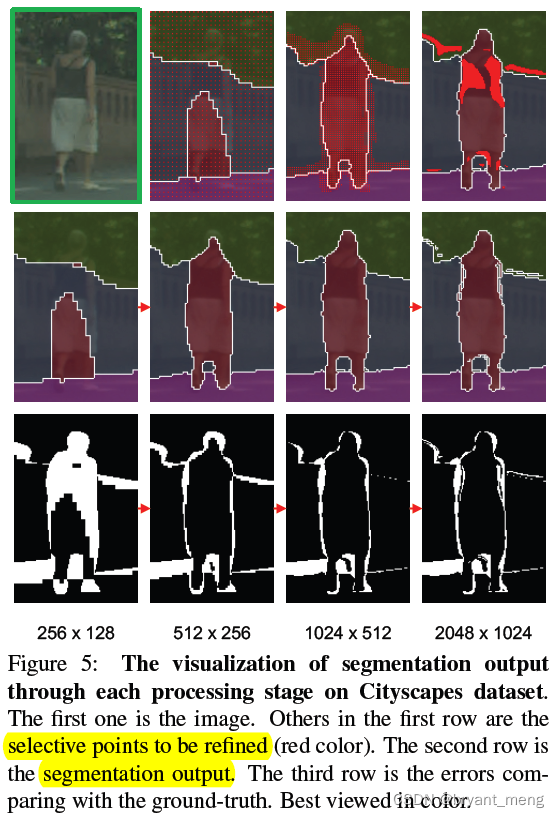
The second line should be refine Later results
Zoom in on the first line , The second picture is all red dots
2)Comparing segmentation approaches

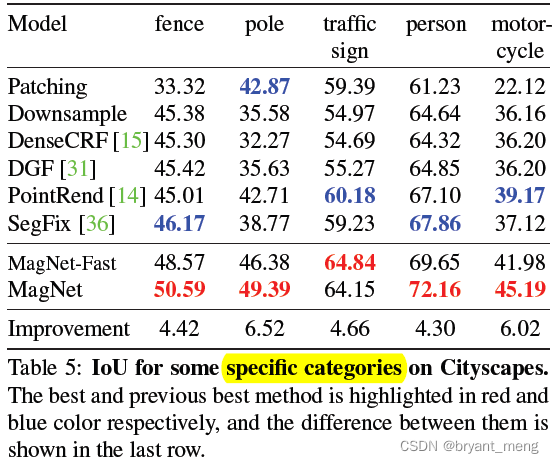
There are many analogy poles ( More delicate ), The segmentation is better than before
3)Ablation study: point selection
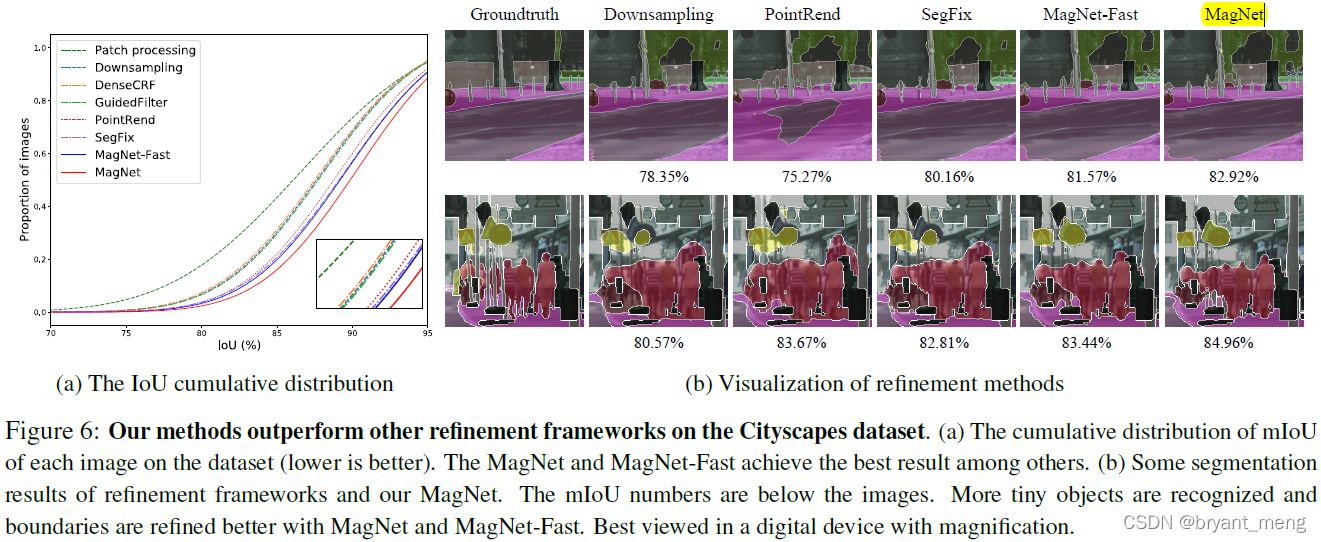
chart (a) It can be seen that ,MagNet Of IoU Bigger than other methods
4)Ablation study: point selection
Here we explore some Y u Y^u Yu and R u R^u Ru Combination of , 2 16 = 65536 2^{16} = 65536 216=65536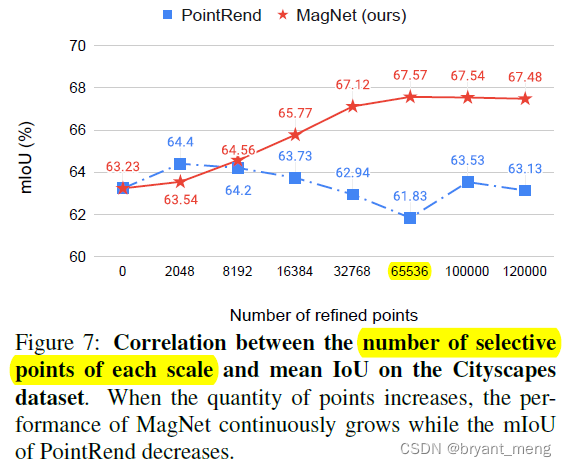
Here we explore each scale need refine Of point Number
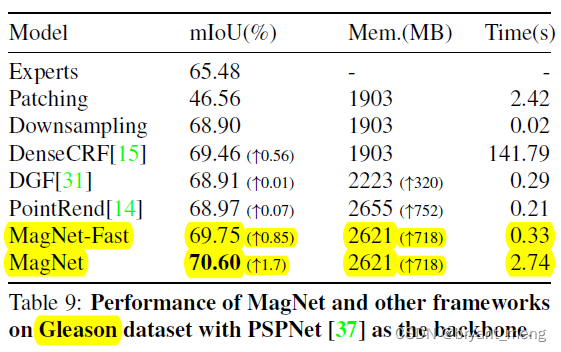
5)Ablation study: segmentation backbones
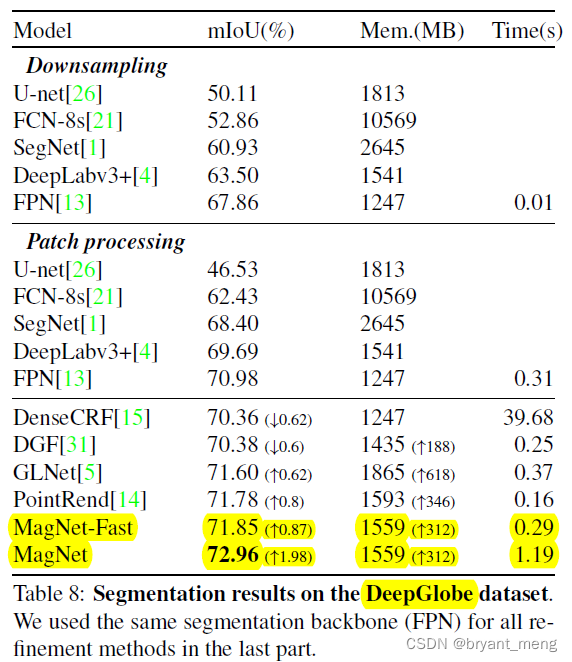
5.3 DeepGlobe
5.4 Gleason
6 Conclusion(own)
accumulated Good idea
stage Too much speed should be much slower
Granularity and resolution
边栏推荐
- ModuleNotFoundError: No module named ‘pytest‘
- 【Hide-and-Seek】《Hide-and-Seek: A Data Augmentation Technique for Weakly-Supervised Localization xxx》
- 传统目标检测笔记1__ Viola Jones
- Proof and understanding of pointnet principle
- How to clean up logs on notebook computers to improve the response speed of web pages
- PPT的技巧
- 【TCDCN】《Facial landmark detection by deep multi-task learning》
- conda常用命令
- Memory model of program
- Implementation of yolov5 single image detection based on pytorch
猜你喜欢
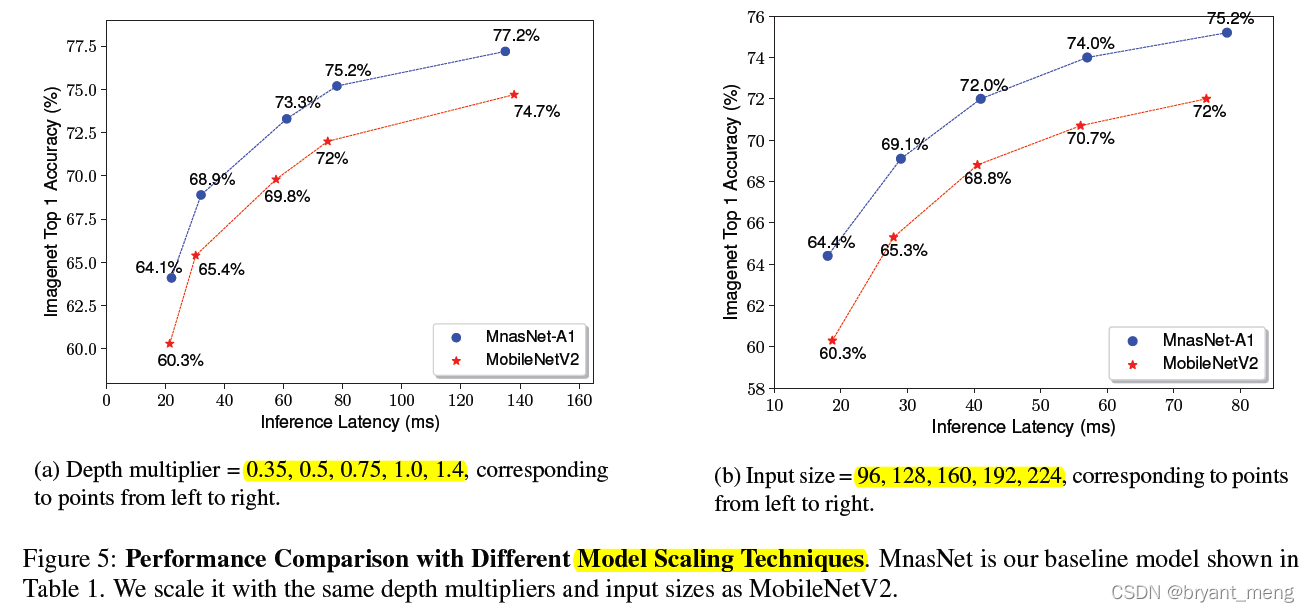
【MnasNet】《MnasNet:Platform-Aware Neural Architecture Search for Mobile》

【双目视觉】双目矫正

Proof and understanding of pointnet principle

Faster-ILOD、maskrcnn_benchmark训练coco数据集及问题汇总

【TCDCN】《Facial landmark detection by deep multi-task learning》
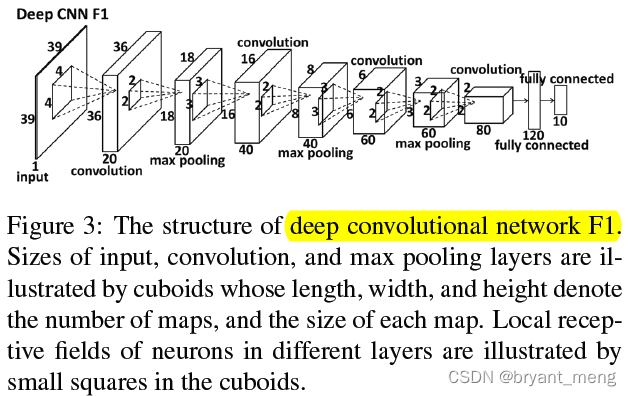
【Cascade FPD】《Deep Convolutional Network Cascade for Facial Point Detection》
open3d学习笔记三【采样与体素化】
【Sparse-to-Dense】《Sparse-to-Dense:Depth Prediction from Sparse Depth Samples and a Single Image》
TimeCLR: A self-supervised contrastive learning framework for univariate time series representation

Traditional target detection notes 1__ Viola Jones
随机推荐
PointNet原理证明与理解
TimeCLR: A self-supervised contrastive learning framework for univariate time series representation
Faster-ILOD、maskrcnn_benchmark训练coco数据集及问题汇总
MMDetection模型微调
Common CNN network innovations
【双目视觉】双目立体匹配
Tencent machine test questions
聊天中文语料库对比(附上各资源链接)
PHP returns the corresponding key value according to the value in the two-dimensional array
生成模型与判别模型的区别与理解
[CVPR‘22 Oral2] TAN: Temporal Alignment Networks for Long-term Video
一份Slide两张表格带你快速了解目标检测
Two dimensional array de duplication in PHP
Jordan decomposition example of matrix
Interpretation of ernie1.0 and ernie2.0 papers
open3d环境错误汇总
[model distillation] tinybert: distilling Bert for natural language understanding
《Handwritten Mathematical Expression Recognition with Bidirectionally Trained Transformer》论文翻译
How do vision transformer work?【论文解读】
Memory model of program