当前位置:网站首页>【双目视觉】双目矫正
【双目视觉】双目矫正
2022-07-02 06:26:00 【寂云萧】
一、双目标定
双目标定需要获取到两个相机的内参以及变换矩阵。可参照链接:
https://blog.csdn.net/qq_38236355/article/details/89280633
https://blog.csdn.net/qingfengxiaosong/article/details/109897053
或者自行百度
建议使用Matlab工具箱做标定,其中建议勾选3 Coefficients。
输出Matlab的数据之后,可用一下脚本提取数据:
rowName = cell(1,10);
rowName{1,1} = '平移矩阵';
rowName{1,2} = '旋转矩阵';
rowName{1,3} = '相机1内参矩阵';
rowName{1,4} = '相机1径向畸变';
rowName{1,5} = '相机1切向畸变';
rowName{1,6} = '相机2内参矩阵';
rowName{1,7} = '相机2径向畸变';
rowName{1,8} = '相机2切向畸变';
rowName{1,9} = '相机1畸变向量';
rowName{1,10} = '相机2畸变向量';
xlswrite('out.xlsx',rowName(1,1),1,'A1');
xlswrite('out.xlsx',rowName(1,2),1,'A2');
xlswrite('out.xlsx',rowName(1,3),1,'A5');
xlswrite('out.xlsx',rowName(1,4),1,'A8');
xlswrite('out.xlsx',rowName(1,5),1,'A9');
xlswrite('out.xlsx',rowName(1,6),1,'A10');
xlswrite('out.xlsx',rowName(1,7),1,'A13');
xlswrite('out.xlsx',rowName(1,8),1,'A14');
xlswrite('out.xlsx',rowName(1,9),1,'A15');
xlswrite('out.xlsx',rowName(1,10),1,'A16');
xlswrite('out.xlsx',stereoParams.TranslationOfCamera2,1,'B1'); % 平移矩阵
xlswrite('out.xlsx',stereoParams.RotationOfCamera2.',1,'B2'); % 旋转矩阵
xlswrite('out.xlsx',stereoParams.CameraParameters1.IntrinsicMatrix.',1,'B5'); % 相机1内参矩阵
xlswrite('out.xlsx',stereoParams.CameraParameters1.RadialDistortion,1,'B8'); % 相机1径向畸变(1,2,5)
xlswrite('out.xlsx',stereoParams.CameraParameters1.TangentialDistortion,1,'B9'); % 相机1切向畸变(3,4)
xlswrite('out.xlsx',stereoParams.CameraParameters2.IntrinsicMatrix.',1,'B10'); % 相机2内参矩阵
xlswrite('out.xlsx',stereoParams.CameraParameters2.RadialDistortion,1,'B13'); % 相机2径向畸变(1,2,5)
xlswrite('out.xlsx',stereoParams.CameraParameters2.TangentialDistortion,1,'B14'); % 相机2切向畸变(3,4)
xlswrite('out.xlsx',[stereoParams.CameraParameters1.RadialDistortion(1:2), stereoParams.CameraParameters1.TangentialDistortion,...
stereoParams.CameraParameters1.RadialDistortion(3)],1,'B15'); % 相机1畸变向量
xlswrite('out.xlsx',[stereoParams.CameraParameters2.RadialDistortion(1:2), stereoParams.CameraParameters2.TangentialDistortion,...
stereoParams.CameraParameters2.RadialDistortion(3)],1,'B16'); % 相机2畸变向量
Python双目矫正
新建一个python脚本,输入以下代码:
import cv2
import numpy as np
# 左目内参
left_camera_matrix = np.array([[443.305413261701, 0., 473.481578105186],
[0., 445.685585080218, 481.627083907456],
[0., 0., 1.]])
#左目畸变
#k1 k2 p1 p2 k3
left_distortion = np.array([[-0.261575534517449, 0.0622298171820726, 0., 0., -0.00638628534161724]])
# 右目内参
right_camera_matrix = np.array([[441.452616156177,0., 484.276702473006],
[0., 444.350924943458, 465.054536507021],
[0., 0., 1.]])
# 右目畸变
right_distortion = np.array([[-0.257761221642368, 0.0592089672793365, 0., 0., -0.00576090991058531]])
# 旋转矩阵
R = np.matrix([
[0.999837210893742, -0.00477934325693493, 0.017398551383822],
[0.00490062605211919, 0.999963944810228, -0.0069349076319899],
[-0.0173647797717217, 0.00701904249875521, 0.999824583347439]
])
# 平移矩阵
T = np.array([-71.0439056359403, -0.474467959947789, -0.27989811881883]) # 平移关系向量
size = (960, 960) # 图像尺寸
# 进行立体更正
R1, R2, P1, P2, Q, validPixROI1, validPixROI2 = cv2.stereoRectify(left_camera_matrix, left_distortion,
right_camera_matrix, right_distortion, size, R,
T)
# 计算更正map
left_map1, left_map2 = cv2.initUndistortRectifyMap(left_camera_matrix, left_distortion, R1, P1, size, cv2.CV_16SC2)
right_map1, right_map2 = cv2.initUndistortRectifyMap(right_camera_matrix, right_distortion, R2, P2, size, cv2.CV_16SC2)
参数需要换成自己实际的参数。
接下来随便写一个脚本测试一下更正结果:
import cv2
import numpy as np
import camera_config
w = 1920
h = 960
cap = cv2.VideoCapture(0)
cap.set(cv2.CAP_PROP_FRAME_WIDTH, w)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, h)
key = ""
ww = int(w/2)
jiange = int(h/10)
while key!=27:
ret, img = cap.read()
if ret:
imgLeft = img[:, :ww]
imgRight = img[:, ww:w]
left_remap = cv2.remap(imgLeft, camera_config.left_map1, camera_config.left_map2, cv2.INTER_LINEAR)
right_remap = cv2.remap(imgRight, camera_config.right_map1, camera_config.right_map2, cv2.INTER_LINEAR)
out = np.hstack([left_remap, right_remap])
for i in range(10):
cv2.line(out, (0, jiange*i), (w, jiange*i), (255, 0, 0), 2)
cv2.imshow("frame", out)
key = cv2.waitKey(10)
cap.release()
cv2.destroyAllWindows()
即可看到效果:
校正前(很差的相机,鱼眼效果,不适合用于实际使用):
校正后:
边栏推荐
- Faster-ILOD、maskrcnn_benchmark训练自己的voc数据集及问题汇总
- Calculate the difference in days, months, and years between two dates in PHP
- Record of problems in the construction process of IOD and detectron2
- Translation of the paper "written mathematical expression recognition with bidirectionally trained transformer"
- [paper introduction] r-drop: regulated dropout for neural networks
- latex公式正体和斜体
- 【Ranking】Pre-trained Language Model based Ranking in Baidu Search
- mmdetection训练自己的数据集--CVAT标注文件导出coco格式及相关操作
- [medical] participants to medical ontologies: Content Selection for Clinical Abstract Summarization
- Optimization method: meaning of common mathematical symbols
猜你喜欢

Interpretation of ernie1.0 and ernie2.0 papers

机器学习理论学习:感知机
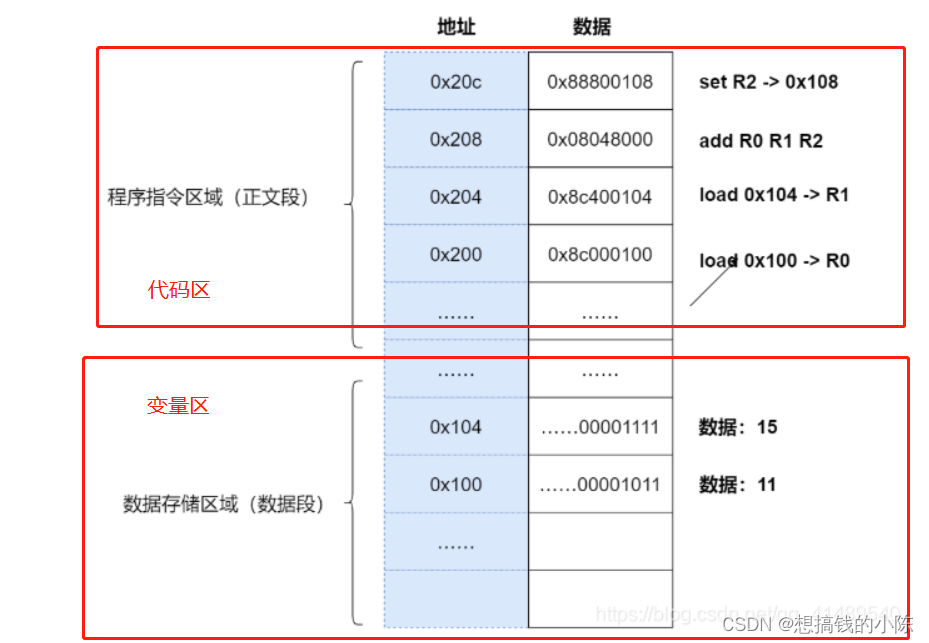
程序的执行

Implementation of yolov5 single image detection based on pytorch
![[Bert, gpt+kg research] collection of papers on the integration of Pretrain model with knowledge](/img/2e/e74d7a9efbf9fe617f4d7b46867c0a.png)
[Bert, gpt+kg research] collection of papers on the integration of Pretrain model with knowledge
【Wing Loss】《Wing Loss for Robust Facial Landmark Localisation with Convolutional Neural Networks》
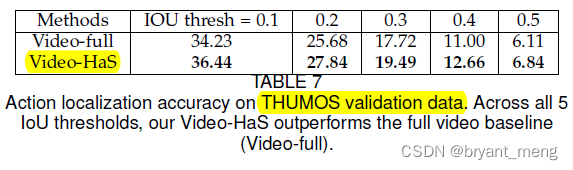
【Hide-and-Seek】《Hide-and-Seek: A Data Augmentation Technique for Weakly-Supervised Localization xxx》

【Paper Reading】
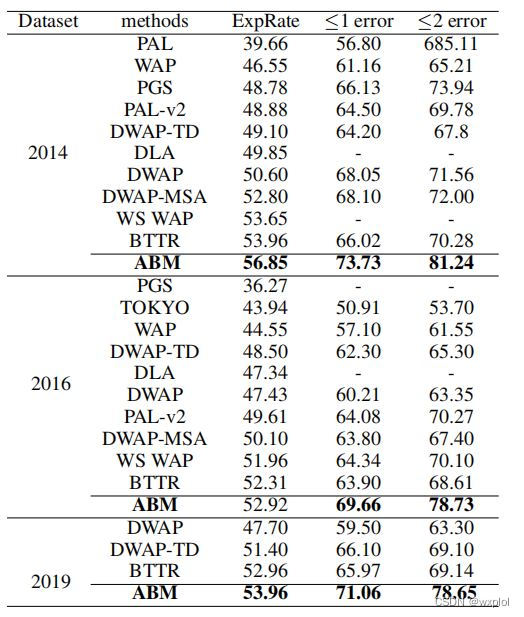
ABM thesis translation
【Mixup】《Mixup:Beyond Empirical Risk Minimization》
随机推荐
[Bert, gpt+kg research] collection of papers on the integration of Pretrain model with knowledge
win10+vs2017+denseflow编译
【Mixup】《Mixup:Beyond Empirical Risk Minimization》
Faster-ILOD、maskrcnn_benchmark安装过程及遇到问题
[multimodal] clip model
How to clean up logs on notebook computers to improve the response speed of web pages
Traditional target detection notes 1__ Viola Jones
Proof and understanding of pointnet principle
【DIoU】《Distance-IoU Loss:Faster and Better Learning for Bounding Box Regression》
Using MATLAB to realize: power method, inverse power method (origin displacement)
【Sparse-to-Dense】《Sparse-to-Dense:Depth Prediction from Sparse Depth Samples and a Single Image》
点云数据理解(PointNet实现第3步)
CPU的寄存器
Interpretation of ernie1.0 and ernie2.0 papers
【Cascade FPD】《Deep Convolutional Network Cascade for Facial Point Detection》
Implementation of purchase, sales and inventory system with ssm+mysql
Generate random 6-bit invitation code in PHP
parser. parse_ Args boolean type resolves false to true
Delete the contents under the specified folder in PHP
latex公式正体和斜体