当前位置:网站首页>open3d学习笔记五【RGBD融合】
open3d学习笔记五【RGBD融合】
2022-07-02 06:26:00 【寂云萧】
1.RGB图像+深度图像融合
先建立RGBD图像。
depth = o3d.io.read_image("path/to/depth.jpg")
color = o3d.io.read_image("path/to/color.jpg")
rgbd_image = o3d.geometry.RGBDImage.create_from_color_and_depth(
color, depth, depth_trunc=4.0, convert_rgb_to_intensity=False)
根据RGBD图像以及相机内参生成点云数据
pcd = o3d.geometry.PointCloud.create_from_rgbd_image(rgbd_image,
# 输入open3d能识别的相机内参,如果用自己的相机,则需要先做内参的转换
o3d.camera.PinholeCameraIntrinsic(
o3d.camera.PinholeCameraIntrinsicParameters.
PrimeSenseDefault))
# 把生成的点云显示出来
o3d.visualization.draw_geometries([pcd])
2.RGBD融合
首先需要准备相机轨迹,文件名后缀.log
0 0 1
1.00000000 -0.00000000 -0.00000000 -0.00000000
-0.00000000 1.00000000 0.00000000 -0.00000000
0.00000000 -0.00000000 1.00000000 0.00000000
0.00000000 0.00000000 0.00000000 1.00000000
1 1 2
0.99999139 -0.00001393 0.00415030 0.00118646
-0.00003622 0.99992698 0.01208406 -0.02351636
-0.00415016 -0.01208411 0.99991837 -0.00144057
0.00000000 0.00000000 0.00000000 1.00000000
使用以下函数读取
class CameraPose:
def __init__(self, meta, mat):
self.metadata = meta
self.pose = mat
def __str__(self):
return 'Metadata : ' + ' '.join(map(str, self.metadata)) + '\n' + \
"Pose : " + "\n" + np.array_str(self.pose)
def read_trajectory(filename):
traj = []
with open(filename, 'r') as f:
metastr = f.readline()
while metastr:
metadata = list(map(int, metastr.split()))
mat = np.zeros(shape=(4, 4))
for i in range(4):
matstr = f.readline()
mat[i, :] = np.fromstring(matstr, dtype=float, sep=' \t')
traj.append(CameraPose(metadata, mat))
metastr = f.readline()
return traj
读取图片文件函数
def sorted_alphanum(file_list_ordered):
convert = lambda text: int(text) if text.isdigit() else text
alphanum_key = lambda key: [convert(c) for c in re.split('([0-9]+)', key)]
return sorted(file_list_ordered, key=alphanum_key)
def get_file_list(path, extension=None):
if extension is None:
file_list = [path + f for f in os.listdir(path) if os.path.isfile(join(path, f))]
else:
file_list = [
path + f
for f in os.listdir(path)
if os.path.isfile(os.path.join(path, f)) and os.path.splitext(f)[1] == extension
]
file_list = sorted_alphanum(file_list)
return file_list
RGBD重建
数据集可以从github中获取,open3d_downloads。
def load_point_clouds(volume, voxel_size=0.0,debug_mode = True):
path = "mode/livingroom1_clean_micro/"
rgbd_images = []
pcds = []
depth_image_path = get_file_list(os.path.join(path, "depth/"),
extension=".png")
color_image_path = get_file_list(os.path.join(path, "image/"),
extension=".jpg")
assert (len(depth_image_path) == len(color_image_path))
for i in range(len(depth_image_path)):
depth = o3d.io.read_image(os.path.join(depth_image_path[i]))
color = o3d.io.read_image(os.path.join(color_image_path[i]))
rgbd_image = o3d.geometry.RGBDImage.create_from_color_and_depth(
color, depth, depth_trunc=4.0, convert_rgb_to_intensity=False)
if debug_mode:
pcd = o3d.geometry.PointCloud.create_from_rgbd_image(
rgbd_image,
o3d.camera.PinholeCameraIntrinsic(
o3d.camera.PinholeCameraIntrinsicParameters.
PrimeSenseDefault))
pcd.transform([[1, 0, 0, 0], [0, -1, 0, 0], [0, 0, -1, 0], [0, 0, 0, 1]])
pcd_down = pcd.voxel_down_sample(voxel_size=voxel_size)
o3d.visualization.draw_geometries([pcd_down])
pcds.append(pcd_down)
else:
camera_poses = read_trajectory("mode\\livingroom1_clean_micro\\test_scene\\trajectory.log")
volume.integrate(rgbd_image,
o3d.camera.PinholeCameraIntrinsic(
o3d.camera.PinholeCameraIntrinsicParameters.PrimeSenseDefault),
np.linalg.inv(camera_poses[i].pose))
rgbd_images.append(rgbd_image)
if debug_mode:
return pcds
else:
return volume
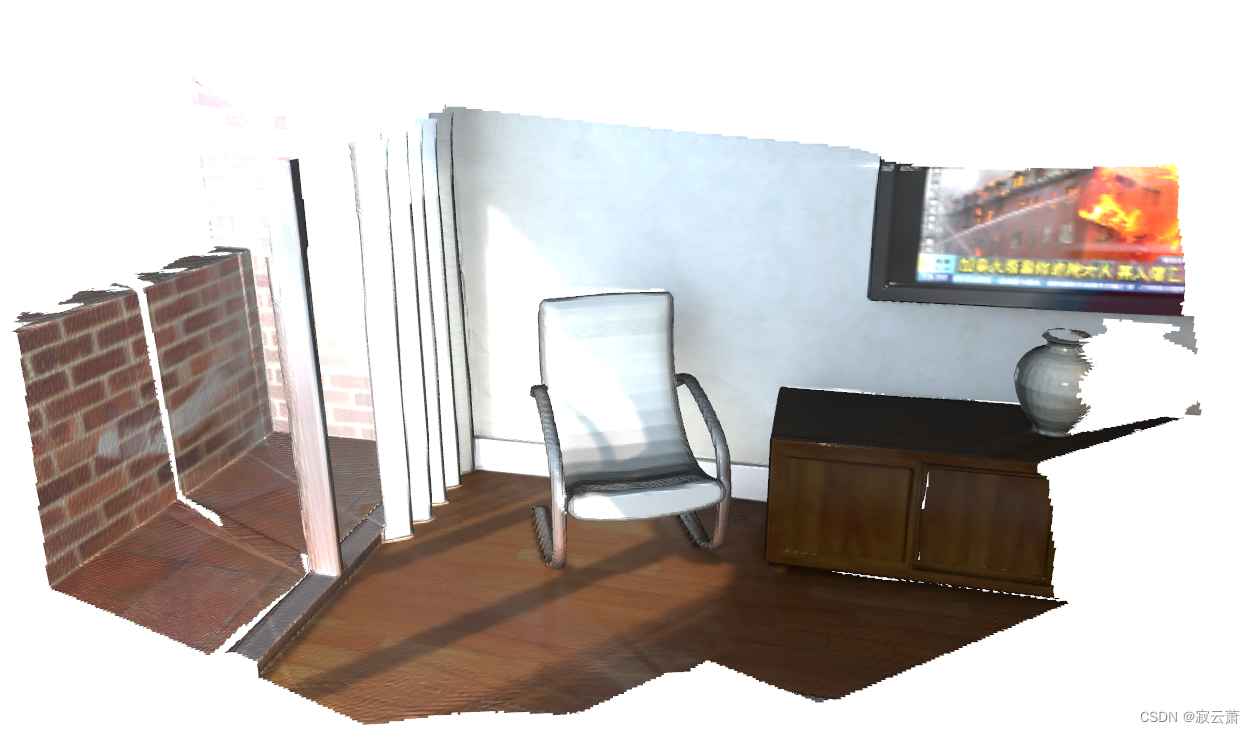
3.整体代码
数据集一共210张,全部读取。
下面开始调用以上函数,生成融合后的点云图。注意图片有点多,所需时间较久。
from ntpath import join
import open3d as o3d
import numpy as np
import os
import re
# 相机轨迹
class CameraPose:
def __init__(self, meta, mat):
self.metadata = meta
self.pose = mat
def __str__(self):
return 'Metadata : ' + ' '.join(map(str, self.metadata)) + '\n' + \
"Pose : " + "\n" + np.array_str(self.pose)
def read_trajectory(filename):
traj = []
with open(filename, 'r') as f:
metastr = f.readline()
while metastr:
metadata = list(map(int, metastr.split()))
mat = np.zeros(shape=(4, 4))
for i in range(4):
matstr = f.readline()
mat[i, :] = np.fromstring(matstr, dtype=float, sep=' \t')
traj.append(CameraPose(metadata, mat))
metastr = f.readline()
return traj
# 读取图片文件
def sorted_alphanum(file_list_ordered):
convert = lambda text: int(text) if text.isdigit() else text
alphanum_key = lambda key: [convert(c) for c in re.split('([0-9]+)', key)]
return sorted(file_list_ordered, key=alphanum_key)
def get_file_list(path, extension=None):
if extension is None:
file_list = [path + f for f in os.listdir(path) if os.path.isfile(join(path, f))]
else:
file_list = [
path + f
for f in os.listdir(path)
if os.path.isfile(os.path.join(path, f)) and os.path.splitext(f)[1] == extension
]
file_list = sorted_alphanum(file_list)
return file_list
# RGBD重建
def load_point_clouds(volume, voxel_size=0.0,debug_mode = True):
path = "mode/livingroom1_clean_micro/"
rgbd_images = []
pcds = []
depth_image_path = get_file_list(os.path.join(path, "depth/"),
extension=".png")
color_image_path = get_file_list(os.path.join(path, "image/"),
extension=".jpg")
assert (len(depth_image_path) == len(color_image_path))
for i in range(len(depth_image_path)):
# for i in range(4):
depth = o3d.io.read_image(os.path.join(depth_image_path[i]))
color = o3d.io.read_image(os.path.join(color_image_path[i]))
rgbd_image = o3d.geometry.RGBDImage.create_from_color_and_depth(
color, depth, depth_trunc=4.0, convert_rgb_to_intensity=False)
if debug_mode:
pcd = o3d.geometry.PointCloud.create_from_rgbd_image(
rgbd_image,
o3d.camera.PinholeCameraIntrinsic(
o3d.camera.PinholeCameraIntrinsicParameters.
PrimeSenseDefault))
pcd.transform([[-1, 0, 0, 0], [0, -1, 0, 0], [0, 0, -1, 0], [0, 0, 0, 1]])
pcd_down = pcd.voxel_down_sample(voxel_size=voxel_size)
o3d.visualization.draw_geometries([pcd_down])
pcds.append(pcd_down)
else:
camera_poses = read_trajectory("mode\\livingroom1_clean_micro\\test_scene\\trajectory.log")
volume.integrate(rgbd_image,
o3d.camera.PinholeCameraIntrinsic(
o3d.camera.PinholeCameraIntrinsicParameters.PrimeSenseDefault),
np.linalg.inv(camera_poses[i].pose))
rgbd_images.append(rgbd_image)
if debug_mode:
return pcds
else:
return volume
from time import time
start_time = time()
volume = o3d.pipelines.integration.ScalableTSDFVolume(
voxel_length=4.0 / 512.0,
sdf_trunc=0.04,
color_type=o3d.pipelines.integration.TSDFVolumeColorType.RGB8)
voxel_size = 0.02
debug_mode=False
pcds_down = load_point_clouds(volume, voxel_size, debug_mode=debug_mode)
if not debug_mode:
mesh = pcds_down.extract_triangle_mesh()
mesh.compute_vertex_normals()
mesh.transform([[1, 0, 0, 0], [0, -1, 0, 0], [0, 0, -1, 0], [0, 0, 0, 1]])
print("花费时间:", time() - start_time)
o3d.visualization.draw_geometries([mesh])
边栏推荐
- 【BiSeNet】《BiSeNet:Bilateral Segmentation Network for Real-time Semantic Segmentation》
- Alpha Beta Pruning in Adversarial Search
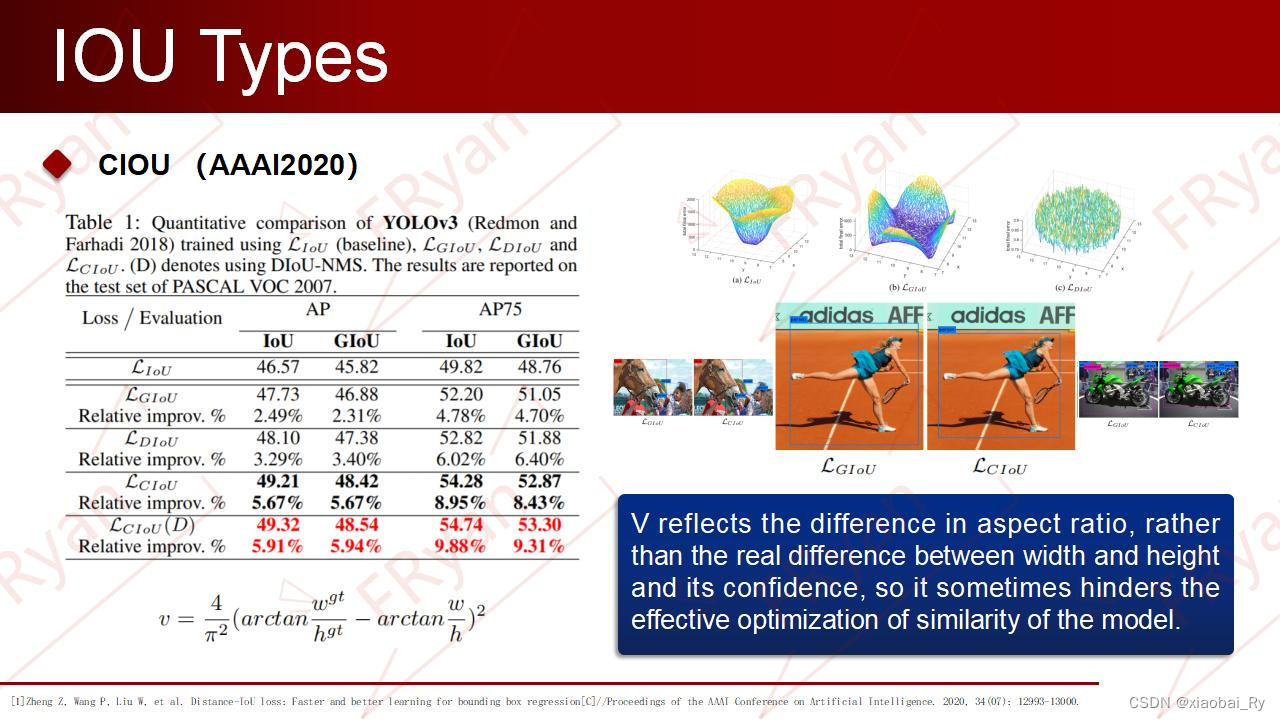
- 【DIoU】《Distance-IoU Loss:Faster and Better Learning for Bounding Box Regression》
- What if the notebook computer cannot run the CMD command
- [model distillation] tinybert: distilling Bert for natural language understanding
- SSM supermarket order management system
- 论文写作tip2
- Translation of the paper "written mathematical expression recognition with bidirectionally trained transformer"
- PPT的技巧
- 常见CNN网络创新点
猜你喜欢
Execution of procedures
A slide with two tables will help you quickly understand the target detection

iOD及Detectron2搭建过程问题记录
论文写作tip2

Faster-ILOD、maskrcnn_benchmark安装过程及遇到问题
点云数据理解(PointNet实现第3步)
【MagNet】《Progressive Semantic Segmentation》

【FastDepth】《FastDepth:Fast Monocular Depth Estimation on Embedded Systems》
TimeCLR: A self-supervised contrastive learning framework for univariate time series representation
![[CVPR‘22 Oral2] TAN: Temporal Alignment Networks for Long-term Video](/img/bc/c54f1f12867dc22592cadd5a43df60.png)
[CVPR‘22 Oral2] TAN: Temporal Alignment Networks for Long-term Video
随机推荐
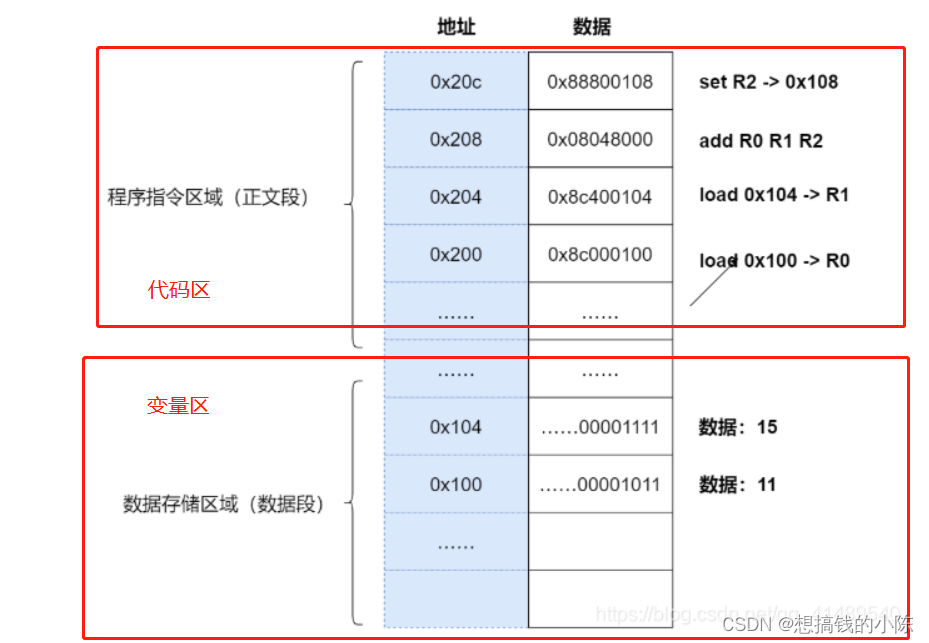
CPU register
Yolov3 trains its own data set (mmdetection)
[medical] participants to medical ontologies: Content Selection for Clinical Abstract Summarization
The difference and understanding between generative model and discriminant model
【FastDepth】《FastDepth:Fast Monocular Depth Estimation on Embedded Systems》
ModuleNotFoundError: No module named ‘pytest‘
[introduction to information retrieval] Chapter II vocabulary dictionary and inverted record table
【Programming】
What if the notebook computer cannot run the CMD command
PPT的技巧
Sorting out dialectics of nature
机器学习理论学习:感知机
CONDA common commands
Mmdetection installation problem
[introduction to information retrieval] Chapter 1 Boolean retrieval
How to clean up logs on notebook computers to improve the response speed of web pages
win10+vs2017+denseflow编译
Latex formula normal and italic
label propagation 标签传播
【Paper Reading】