当前位置:网站首页>Robot autonomous exploration series papers environment code
Robot autonomous exploration series papers environment code
2022-07-07 22:26:00 【Lift the cement together】
Recently I saw CMU Open source a series of robot autonomous exploration code , I happen to be working in this direction myself , I'm going to take a look at their work first to get in .
They have opened two independently explored codes , State estimation used 、 The algorithm of obstacle avoidance is based on one work , So first analyze the code of this work .
 https://github.com/HongbiaoZ/autonomous_exploration_development_environment
https://github.com/HongbiaoZ/autonomous_exploration_development_environmentCode launch file :
<launch>
<arg name="cameraOffsetZ" default="0"/>
<arg name="vehicleX" default="0"/>
<arg name="vehicleY" default="0"/>
<arg name="checkTerrainConn" default="false"/>
<include file="$(find ps3joy)/launch/ps3.launch" />
<include file="$(find local_planner)/launch/local_planner.launch" >
<arg name="cameraOffsetZ" value="$(arg cameraOffsetZ)"/>
<arg name="goalX" value="$(arg vehicleX)"/>
<arg name="goalY" value="$(arg vehicleY)"/>
</include>
<include file="$(find terrain_analysis)/launch/terrain_analysis.launch" />
<include file="$(find terrain_analysis_ext)/launch/terrain_analysis_ext.launch" >
<arg name="checkTerrainConn" value="$(arg checkTerrainConn)"/>
</include>
<include file="$(find sensor_scan_generation)/launch/sensor_scan_generation.launch" />
<include file="$(find loam_interface)/launch/loam_interface.launch" />
<node launch-prefix="nice" pkg="rviz" type="rviz" name="rvizGA" args="-d $(find vehicle_simulator)/rviz/vehicle_simulator.rviz" respawn="true"/>
</launch>1. loam_interface
This program is to provide a and slam State estimation is an excuse for node communication , Can be very convenient in launch Modified in the document slam Algorithm topic
First of all to see loam_interface.launch
<launch>
<node pkg="loam_interface" type="loamInterface" name="loamInterface" output="screen" required="true">
<param name="stateEstimationTopic" type="string" value="/lio_sam/mapping/odometry" />
<param name="registeredScanTopic" type="string" value="/lio_sam/mapping/cloud_registered" />
<param name="flipStateEstimation" type="bool" value="false />
<param name="flipRegisteredScan" type="bool" value="false" />
<param name="sendTF" type="bool" value="true" />
<param name="reverseTF" type="bool" value="false" />
</node>
</launch>
This article takes lio-sam State estimation node .
ros::Subscriber subOdometry = nh.subscribe<nav_msgs::Odometry> (stateEstimationTopic, 5, odometryHandler);
ros::Subscriber subLaserCloud = nh.subscribe<sensor_msgs::PointCloud2> (registeredScanTopic, 5, laserCloudHandler);1.1 odometryHandler
subscribe lio-sam Odometer information /lio_sam/mapping/odometry( The position and posture of the robot in the world coordinate system ), Execute callback function odometryHandler( Change the position and posture of the robot in the world coordinate system to a topic name /state_estimation Release it , And release TF Change the relationship )
void odometryHandler(const nav_msgs::Odometry::ConstPtr& odom)
{
double roll, pitch, yaw;
geometry_msgs::Quaternion geoQuat = odom->pose.pose.orientation;
odomData = *odom;
// In this case flipStateEstimation by false
if (flipStateEstimation) {
tf::Matrix3x3(tf::Quaternion(geoQuat.z, -geoQuat.x, -geoQuat.y, geoQuat.w)).getRPY(roll, pitch, yaw);
pitch = -pitch;
yaw = -yaw;
geoQuat = tf::createQuaternionMsgFromRollPitchYaw(roll, pitch, yaw);
odomData.pose.pose.orientation = geoQuat;
odomData.pose.pose.position.x = odom->pose.pose.position.z;
odomData.pose.pose.position.y = odom->pose.pose.position.x;
odomData.pose.pose.position.z = odom->pose.pose.position.y;
}
// publish odometry messages
odomData.header.frame_id = "/map";
odomData.child_frame_id = "/sensor";
pubOdometryPointer->publish(odomData);
// publish tf messages
odomTrans.stamp_ = odom->header.stamp;
odomTrans.frame_id_ = "/map";
odomTrans.child_frame_id_ = "/sensor";
odomTrans.setRotation(tf::Quaternion(geoQuat.x, geoQuat.y, geoQuat.z, geoQuat.w));
odomTrans.setOrigin(tf::Vector3(odomData.pose.pose.position.x, odomData.pose.pose.position.y, odomData.pose.pose.position.z));
if (sendTF) {
if (!reverseTF) {
tfBroadcasterPointer->sendTransform(odomTrans);
} else {
tfBroadcasterPointer->sendTransform(tf::StampedTransform(odomTrans.inverse(), odom->header.stamp, "/sensor", "/map"));
}
}
}
1.2 laserCloudHandler
subscribe lio-sam Key frame point cloud information /lio_sam/mapping/cloud_registered( Key frames in the world coordinate system ), Execute callback function laserCloudHandler
void laserCloudHandler(const sensor_msgs::PointCloud2ConstPtr& laserCloudIn)
{
laserCloud->clear();
pcl::fromROSMsg(*laserCloudIn, *laserCloud);
// stay lio-sam In Chinese, it means false
if (flipRegisteredScan) {
int laserCloudSize = laserCloud->points.size();
for (int i = 0; i < laserCloudSize; i++) {
float temp = laserCloud->points[i].x;
laserCloud->points[i].x = laserCloud->points[i].z;
laserCloud->points[i].z = laserCloud->points[i].y;
laserCloud->points[i].y = temp;
}
}
// publish registered scan messages
sensor_msgs::PointCloud2 laserCloud2;
pcl::toROSMsg(*laserCloud, laserCloud2);
laserCloud2.header.stamp = laserCloudIn->header.stamp;
laserCloud2.header.frame_id = "/map";
pubLaserCloudPointer->publish(laserCloud2);
}This callback function also publishes the key frame point cloud in the world coordinate system with a topic name /registered_scan
1 loam_interface summary :
Keep receiving slam Part of The current pose and current key frame of the robot in the world coordinate system , And separately /state-estimastion and /registered_scan The topic name is released
2 sensor_scan_generation
subscribe /state_estimation and /registered_scan, perform laserCloudAndOdometryHandler, And publish /state_estimation_at_scan and /sensor_scan
void laserCloudAndOdometryHandler(const nav_msgs::Odometry::ConstPtr& odometry,
const sensor_msgs::PointCloud2ConstPtr& laserCloud2)
{
laserCloudIn->clear();
laserCLoudInSensorFrame->clear();
pcl::fromROSMsg(*laserCloud2, *laserCloudIn);
odometryIn = *odometry;
transformToMap.setOrigin(tf::Vector3(odometryIn.pose.pose.position.x, odometryIn.pose.pose.position.y, odometryIn.pose.pose.position.z));
transformToMap.setRotation(tf::Quaternion(odometryIn.pose.pose.orientation.x, odometryIn.pose.pose.orientation.y,
odometryIn.pose.pose.orientation.z, odometryIn.pose.pose.orientation.w));
int laserCloudInNum = laserCloudIn->points.size();
pcl::PointXYZ p1;
tf::Vector3 vec;
for (int i = 0; i < laserCloudInNum; i++)
{
p1 = laserCloudIn->points[i];
vec.setX(p1.x);
vec.setY(p1.y);
vec.setZ(p1.z);
vec = transformToMap.inverse() * vec;
p1.x = vec.x();
p1.y = vec.y();
p1.z = vec.z();
laserCLoudInSensorFrame->points.push_back(p1);
}2. summary
subscribe /state_estimation as well as /registered_scan, Execute callback function .
Release /state_estimation_at_scan( Equate to /state_estimation)
Release /sensor_scan( The point cloud in the world coordinate system is converted to the sensor Lidar In coordinate system )
3. terrain_analysis
This program subscribes to two topics :
3.1 subscribe /state_estimation, perform odometryHandler
ros::Subscriber subOdometry = nh.subscribe<nav_msgs::Odometry>("/state_estimation", 5, odometryHandler);void odometryHandler(const nav_msgs::Odometry::ConstPtr &odom) {
double roll, pitch, yaw;
geometry_msgs::Quaternion geoQuat = odom->pose.pose.orientation;
tf::Matrix3x3(tf::Quaternion(geoQuat.x, geoQuat.y, geoQuat.z, geoQuat.w))
.getRPY(roll, pitch, yaw);
vehicleRoll = roll;
vehiclePitch = pitch;
vehicleYaw = yaw;
vehicleX = odom->pose.pose.position.x;
vehicleY = odom->pose.pose.position.y;
vehicleZ = odom->pose.pose.position.z;
sinVehicleRoll = sin(vehicleRoll);
cosVehicleRoll = cos(vehicleRoll);
sinVehiclePitch = sin(vehiclePitch);
cosVehiclePitch = cos(vehiclePitch);
sinVehicleYaw = sin(vehicleYaw);
cosVehicleYaw = cos(vehicleYaw);
if (noDataInited == 0) {
vehicleXRec = vehicleX;
vehicleYRec = vehicleY;
noDataInited = 1;
}
if (noDataInited == 1) {
float dis = sqrt((vehicleX - vehicleXRec) * (vehicleX - vehicleXRec) +
(vehicleY - vehicleYRec) * (vehicleY - vehicleYRec));
if (dis >= noDecayDis)
noDataInited = 2;
}
}3.2 subscribe /registered_scan, Execute callback function laserCloudHandler
void laserCloudHandler(const sensor_msgs::PointCloud2ConstPtr &laserCloud2) {
laserCloudTime = laserCloud2->header.stamp.toSec();
if (!systemInited) {
systemInitTime = laserCloudTime;
systemInited = true;
}
laserCloud->clear();
pcl::fromROSMsg(*laserCloud2, *laserCloud);
pcl::PointXYZI point;
laserCloudCrop->clear();
int laserCloudSize = laserCloud->points.size();
for (int i = 0; i < laserCloudSize; i++) {
point = laserCloud->points[i];
float pointX = point.x;
float pointY = point.y;
float pointZ = point.z;
float dis = sqrt((pointX - vehicleX) * (pointX - vehicleX) +
(pointY - vehicleY) * (pointY - vehicleY));
if (pointZ - vehicleZ > minRelZ - disRatioZ * dis &&
pointZ - vehicleZ < maxRelZ + disRatioZ * dis &&
dis < terrainVoxelSize * (terrainVoxelHalfWidth + 1)) {
point.x = pointX;
point.y = pointY;
point.z = pointZ;
point.intensity = laserCloudTime - systemInitTime;
laserCloudCrop->push_back(point);
}
}
newlaserCloud = true;
}Save the current frame point cloud that meets certain conditions to laserCloudCrop in , The intensity of the point is set to the time difference of the laser frame .
And then we go to the main function , about laserCloudCrop Every point in the , Get its two-dimensional grid coordinate index indX,indY
// stack registered laser scans
pcl::PointXYZI point;
int laserCloudCropSize = laserCloudCrop->points.size();
for (int i = 0; i < laserCloudCropSize; i++) {
point = laserCloudCrop->points[i];
//point.x - vehicleX Is the vector from the terrain point to the current point
int indX = int((point.x - vehicleX + terrainVoxelSize / 2) / terrainVoxelSize) + terrainVoxelHalfWidth;
int indY = int((point.y - vehicleY + terrainVoxelSize / 2) / terrainVoxelSize) + terrainVoxelHalfWidth;
// When the rounding is negative , for example x It was originally -0.8, Plus 0.5 It becomes -0.3, seek int It becomes 0, But it should be -1
if (point.x - vehicleX + terrainVoxelSize / 2 < 0)
indX--;
if (point.y - vehicleY + terrainVoxelSize / 2 < 0)
indY--;Save the points whose index does not exceed the limit to terrainVoxelCloud in
if (indX >= 0 && indX < terrainVoxelWidth && indY >= 0 && indY < terrainVoxelWidth) {
terrainVoxelCloud[terrainVoxelWidth * indX + indY]->push_back(point);
terrainVoxelUpdateNum[terrainVoxelWidth * indX + indY]++;
}then , Traverse terrainVoxelCloud Every grid , When the number of point clouds in each grid exceeds a certain amount or exceeds a certain time ( For subsequent point cloud frames , Start when the point cloud frames are more separated ), Reprocessing :
1. For point clouds in each grid terrainVoxelCloudPtr Perform downsampling to obtain laserCloudDwz, Also on terrainVoxelCloudPtr Conduct clear()
2. about laserCloudDwz Every point in the , When certain conditions are met , Save to terrainVoxelCloudPtr
That is, only save terrainVoxelCloud Points in each grid that meet certain conditions
for (int ind = 0; ind < terrainVoxelNum; ind++) {
// When traversing each grid , Only if the number of point clouds is greater than voxelPointUpdateThre When the grid is processed or the time exceeds a certain threshold
// systemInitTime Is the time of the first laser frame
if (terrainVoxelUpdateNum[ind] >= voxelPointUpdateThre ||
laserCloudTime - systemInitTime - terrainVoxelUpdateTime[ind] >= voxelTimeUpdateThre || clearingCloud) {
pcl::PointCloud<pcl::PointXYZI>::Ptr terrainVoxelCloudPtr = terrainVoxelCloud[ind];
laserCloudDwz->clear();
downSizeFilter.setInputCloud(terrainVoxelCloudPtr);
downSizeFilter.filter(*laserCloudDwz);
terrainVoxelCloudPtr->clear();
int laserCloudDwzSize = laserCloudDwz->points.size();
for (int i = 0; i < laserCloudDwzSize; i++) {
point = laserCloudDwz->points[i];
float dis = sqrt((point.x - vehicleX) * (point.x - vehicleX) + (point.y - vehicleY) * (point.y - vehicleY));
// In the voxel grid ,, The point cloud that needs to be segmented by the ground meets the following requirements , These point clouds will be put into terrainCloud , Used for ground segmentation .
// 1. The point cloud height is greater than the minimum threshold
// 2. The point cloud height is less than the maximum threshold
// 3. The time difference between the current point cloud and the point cloud to be processed is less than the threshold decayTime, Or the distance is less than noDecayDis
// 4. The point cloud outside the distance is not cleared at this time , Or not within the distance that needs to be removed
if (point.z - vehicleZ > minRelZ - disRatioZ * dis && point.z - vehicleZ < maxRelZ + disRatioZ * dis &&
(laserCloudTime - systemInitTime - point.intensity < decayTime || dis < noDecayDis) &&
!(dis < clearingDis && clearingCloud)) {
// Only the points that meet the above conditions are reserved
terrainVoxelCloudPtr->push_back(point);
}
}
take terrainVoxelCloud Save all points in to terrainCloud in ;
Traverse terrainVoxelCloud Every point in the :
1. Get the two-dimensional coordinate index of each point indX、indY
2. When each point of Z When the value is within the threshold , Spread it to a 3*3 The neighborhood of , And save it to planarPointElev in
3. For the vector from the current position to the point cloud , Rotate it to sensor In coordinate system , Judge sensor Of each point in the coordinate system FOV The size of the viewing angle , When it is between two thresholds ,planarVoxelDyObs[planarVoxelWidth * indX + indY]++
// Recreate a two-dimensional array to store the elevation information of each point , But the resolution is from 1 Change into 0.2
int terrainCloudSize = terrainCloud->points.size();
for (int i = 0; i < terrainCloudSize; i++) {
point = terrainCloud->points[i];
int indX = int((point.x - vehicleX + planarVoxelSize / 2) / planarVoxelSize) + planarVoxelHalfWidth;
int indY = int((point.y - vehicleY + planarVoxelSize / 2) / planarVoxelSize) + planarVoxelHalfWidth;
if (point.x - vehicleX + planarVoxelSize / 2 < 0)
indX--;
if (point.y - vehicleY + planarVoxelSize / 2 < 0)
indY--;
// Yes Z Point whose value satisfies certain conditions , Save its elevation value
if (point.z - vehicleZ > minRelZ && point.z - vehicleZ < maxRelZ) {
// Each point is not placed in the same grid , Instead, copy to a 3*3 The neighborhood of .
for (int dX = -1; dX <= 1; dX++) {
for (int dY = -1; dY <= 1; dY++) {
// planarVoxelWidth = 51
if (indX + dX >= 0 && indX + dX < planarVoxelWidth &&
indY + dY >= 0 && indY + dY < planarVoxelWidth) {
// Elevation information
planarPointElev[planarVoxelWidth * (indX + dX) + indY + dY].push_back(point.z);
}
}
}
}
Traverse laserCloudCrop Every point in the , Get its indX as well as indY Indexes , When each point of FOV Above a certain threshold ,planarVoxelDyObs[planarVoxelWidth * indX + indY] = 0;
I think it can be understood as a re judgment of the previous one
if (clearDyObs) {
for (int i = 0; i < laserCloudCropSize; i++) {
point = laserCloudCrop->points[i];
int indX = int((point.x - vehicleX + planarVoxelSize / 2) / planarVoxelSize) + planarVoxelHalfWidth;
int indY = int((point.y - vehicleY + planarVoxelSize / 2) / planarVoxelSize) + planarVoxelHalfWidth;
if (point.x - vehicleX + planarVoxelSize / 2 < 0)
indX--;
if (point.y - vehicleY + planarVoxelSize / 2 < 0)
indY--;
if (indX >= 0 && indX < planarVoxelWidth && indY >= 0 && indY < planarVoxelWidth) {
float pointX1 = point.x - vehicleX;
float pointY1 = point.y - vehicleY;
float pointZ1 = point.z - vehicleZ;
float dis1 = sqrt(pointX1 * pointX1 + pointY1 * pointY1);
float angle1 = atan2(pointZ1 - minDyObsRelZ, dis1) * 180.0 / PI;
if (angle1 > minDyObsAngle) {
planarVoxelDyObs[planarVoxelWidth * indX + indY] = 0;
}
}
}
}
边栏推荐
- Revit secondary development - Hide occlusion elements
- Blender exchange group, welcome to the water group ~
- OpenGL job - texture
- 23. Merge K ascending linked lists -c language
- 使用 CustomPaint 绘制基本图形
- Preparing for the interview and sharing experience
- Remember aximp once Use of exe tool
- Revit secondary development - modify wall thickness
- 【Azure微服务 Service Fabric 】在SF节点中开启Performance Monitor及设置抓取进程的方式
- Revit secondary development - project file to family file
猜你喜欢
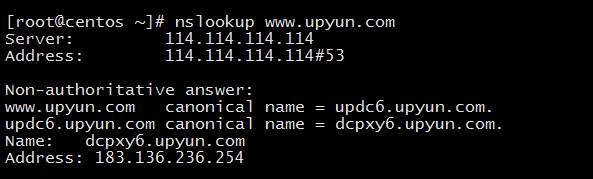
DNS series (I): why does the updated DNS record not take effect?
![Jerry's test box configuration channel [chapter]](/img/d4/fb67f5ee0fe413c22e4e5cd5037938.png)
Jerry's test box configuration channel [chapter]
![[开源] .Net ORM 访问 Firebird 数据库](/img/a2/4eff4f0af53bf3b9839a73019a212f.png)
[开源] .Net ORM 访问 Firebird 数据库
![[azure microservice service fabric] start the performance monitor in the SF node and set the method of capturing the process](/img/80/11c2b539c217ecd6ba55668d3e71e9.png)
[azure microservice service fabric] start the performance monitor in the SF node and set the method of capturing the process
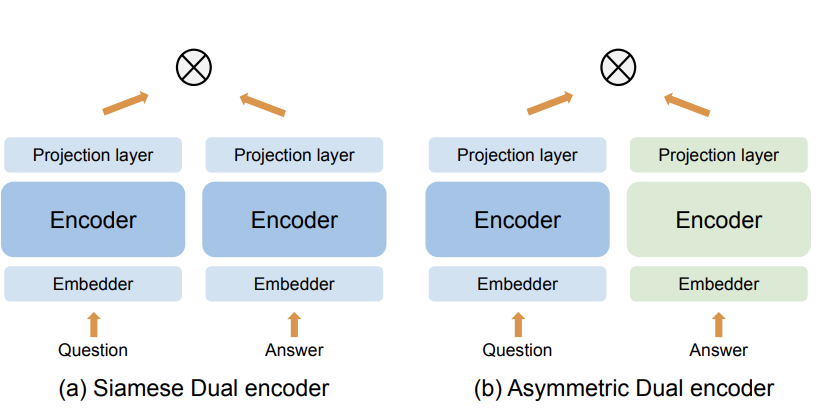
The strongest installation of the twin tower model, Google is playing "antique" again?

客户案例|华律网,通过观测云大幅缩短故障定位时间
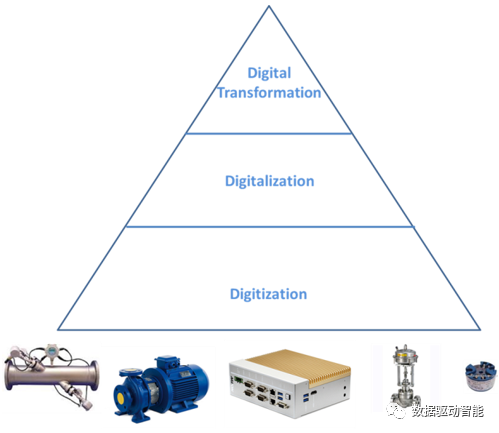
How to make agile digital transformation strategy for manufacturing enterprises
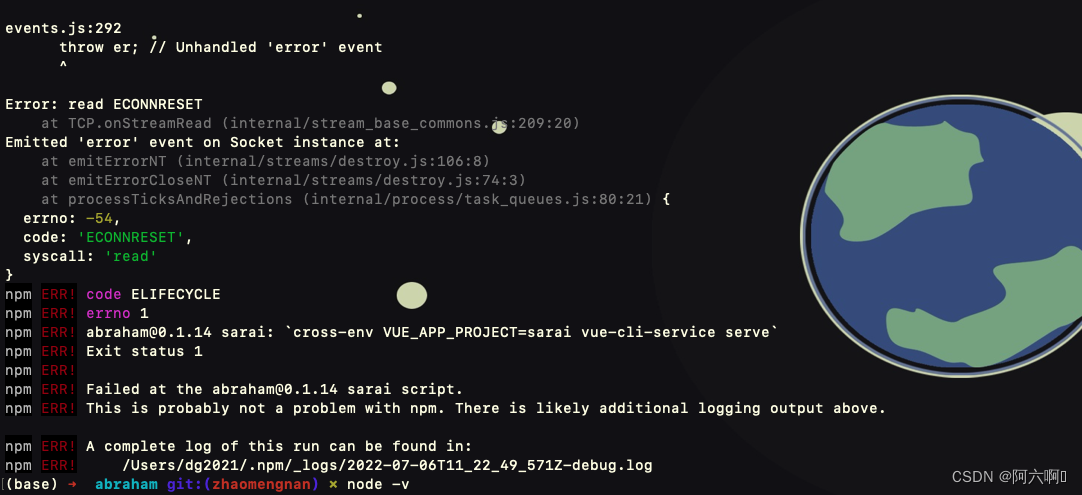
Node:504 error reporting
vite Unrestricted file system access to
PKPM 2020 software installation package download and installation tutorial
随机推荐
Relationship between URL and URI
客户案例|华律网,通过观测云大幅缩短故障定位时间
【Azure微服务 Service Fabric 】如何转移Service Fabric集群中的种子节点(Seed Node)
Time standard library
Remember aximp once Use of exe tool
Use json Stringify() to realize deep copy, be careful, there may be a huge hole
Typescript TS basic knowledge type declaration
Remember that a development is encountered in the pit of origin string sorting
Px4 autonomous flight
Crawler (17) - Interview (2) | crawler interview question bank
Welcome to CSDN markdown editor
The essence of analog Servlet
OpenGL configuration vs2019
Xcode modifies the default background image of launchscreen and still displays the original image
Revit secondary development - shielding warning prompt window
How to close eslint related rules
OpenGL configure assimp
Why can't win11 display seconds? How to solve the problem that win11 time does not display seconds?
Programming mode - table driven programming
Revit secondary development - get the project file path