当前位置:网站首页>Simple example of ros2 planning system plansys2
Simple example of ros2 planning system plansys2
2022-07-07 07:26:00 【zhangrelay】
ROS2 Planning system ros2_planning_system
install :
sudo apt install ros-foxy-plansys2-bringup ros-foxy-plansys2-bt-actions ros-foxy-plansys2-core ros-foxy-plansys2-domain-expert ros-foxy-plansys2-executor ros-foxy-plansys2-lifecycle-manager ros-foxy-plansys2-msgs ros-foxy-plansys2-pddl-parser ros-foxy-plansys2-planner ros-foxy-plansys2-popf-plan-solver ros-foxy-plansys2-problem-expert ros-foxy-plansys2-terminal
If you use galactic, Replace foxy that will do .
Compilation preparation :
rosdep install --from-paths src -r -y
#All required rosdeps installed successfully
compile :
colcon build --symlink-install
source install/setup.bash
Running cases ( Reference resources plansys2_simple_example_launch.py):
# Copyright 2019 Intelligent Robotics Lab
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument, IncludeLaunchDescription, SetEnvironmentVariable
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
def generate_launch_description():
# Get the launch directory
example_dir = get_package_share_directory('plansys2_simple_example')
namespace = LaunchConfiguration('namespace')
declare_namespace_cmd = DeclareLaunchArgument(
'namespace',
default_value='',
description='Namespace')
stdout_linebuf_envvar = SetEnvironmentVariable(
'RCUTILS_CONSOLE_STDOUT_LINE_BUFFERED', '1')
plansys2_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource(os.path.join(
get_package_share_directory('plansys2_bringup'),
'launch',
'plansys2_bringup_launch_monolithic.py')),
launch_arguments={
'model_file': example_dir + '/pddl/simple_example.pddl',
'namespace': namespace
}.items())
# Specify the actions
move_cmd = Node(
package='plansys2_simple_example',
executable='move_action_node',
name='move_action_node',
namespace=namespace,
output='screen',
parameters=[])
charge_cmd = Node(
package='plansys2_simple_example',
executable='charge_action_node',
name='charge_action_node',
namespace=namespace,
output='screen',
parameters=[])
ask_charge_cmd = Node(
package='plansys2_simple_example',
executable='ask_charge_action_node',
name='ask_charge_action_node',
namespace=namespace,
output='screen',
parameters=[]) # Create the launch description and populate
ld = LaunchDescription()
# Set environment variables
ld.add_action(stdout_linebuf_envvar)
ld.add_action(declare_namespace_cmd)
# Declare the launch options
ld.add_action(plansys2_cmd)
ld.add_action(move_cmd)
ld.add_action(charge_cmd)
ld.add_action(ask_charge_cmd)
return ldCommand line run format :
set instance leia robot
set instance entrance room
set instance kitchen room
set instance bedroom room
set instance dinning room
set instance bathroom room
set instance chargingroom room
set predicate (connected entrance dinning)
set predicate (connected dinning entrance)
set predicate (connected dinning kitchen)
set predicate (connected kitchen dinning)
set predicate (connected dinning bedroom)
set predicate (connected bedroom dinning)
set predicate (connected bathroom bedroom)
set predicate (connected bedroom bathroom)
set predicate (connected chargingroom kitchen)
set predicate (connected kitchen chargingroom)
set predicate (charging_point_at chargingroom)
set predicate (battery_low leia)
set predicate (robot_at leia entrance)
set goal (and(robot_at leia bathroom))
run
get plan
run (move leia entrance dinning)
run (askcharge leia entrance)
run (move leia bedroom kitchen)
remove predicate battery_full leia
set predicate battery_low leia
run --ros-args -p model_file:=/home/ros/RobCode/ros2_planning_system_examples/src/plansys2_simple_example/pddl/simple_example.pddl 
(define (domain simple)
(:requirements :strips :typing :adl :fluents :durative-actions)
;; Types ;;;;;;;;;;;;;;;;;;;;;;;;;;;;;;
(:types
robot
room
);; end Types ;;;;;;;;;;;;;;;;;;;;;;;;;
;; Predicates ;;;;;;;;;;;;;;;;;;;;;;;;;
(:predicates
(robot_at ?r - robot ?ro - room)
(connected ?ro1 ?ro2 - room)
(battery_full ?r - robot)
(battery_low ?r - robot)
(charging_point_at ?ro - room)
);; end Predicates ;;;;;;;;;;;;;;;;;;;;
;; Functions ;;;;;;;;;;;;;;;;;;;;;;;;;
(:functions
);; end Functions ;;;;;;;;;;;;;;;;;;;;
;; Actions ;;;;;;;;;;;;;;;;;;;;;;;;;;;;
(:durative-action move
:parameters (?r - robot ?r1 ?r2 - room)
:duration ( = ?duration 5)
:condition (and
(at start(connected ?r1 ?r2))
(at start(robot_at ?r ?r1))
(over all(battery_full ?r))
)
:effect (and
(at start(not(robot_at ?r ?r1)))
(at end(robot_at ?r ?r2))
)
)
(:durative-action askcharge
:parameters (?r - robot ?r1 ?r2 - room)
:duration ( = ?duration 5)
:condition (and
(at start(robot_at ?r ?r1))
(at start(charging_point_at ?r2))
)
:effect (and
(at start(not(robot_at ?r ?r1)))
(at end(robot_at ?r ?r2))
)
)
(:durative-action charge
:parameters (?r - robot ?ro - room)
:duration ( = ?duration 5)
:condition (and
(at start(robot_at ?r ?ro))
(at start(charging_point_at ?ro))
)
:effect (and
(at end(not(battery_low ?r)))
(at end(battery_full ?r))
)
)
);; end Domain ;;;;;;;;;;;;;;;;;;;;;;;;
Perform process simulation :
// Copyright 2019 Intelligent Robotics Lab
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
#include <memory>
#include <algorithm>
#include "plansys2_executor/ActionExecutorClient.hpp"
#include "rclcpp/rclcpp.hpp"
#include "rclcpp_action/rclcpp_action.hpp"
using namespace std::chrono_literals;
class AskCharge : public plansys2::ActionExecutorClient
{
public:
AskCharge()
: plansys2::ActionExecutorClient("askcharge", 1s)
{
progress_ = 0.0;
}
private:
void do_work()
{
if (progress_ < 1.0) {
progress_ += 0.05;
send_feedback(progress_, "AskCharge running");
} else {
finish(true, 1.0, "AskCharge completed");
progress_ = 0.0;
std::cout << std::endl;
}
std::cout << "\r\e[K" << std::flush;
std::cout << "Requesting for charging ... [" << std::min(100.0, progress_ * 100.0) << "%] " <<
std::flush;
}
float progress_;
};
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<AskCharge>();
node->set_parameter(rclcpp::Parameter("action_name", "askcharge"));
node->trigger_transition(lifecycle_msgs::msg::Transition::TRANSITION_CONFIGURE);
rclcpp::spin(node->get_node_base_interface());
rclcpp::shutdown();
return 0;
}It uses :
{
if (progress_ < 1.0) {
progress_ += 0.05;
send_feedback(progress_, "AskCharge running");
} else {
finish(true, 1.0, "AskCharge completed");
progress_ = 0.0;
std::cout << std::endl;
}
std::cout << "\r\e[K" << std::flush;
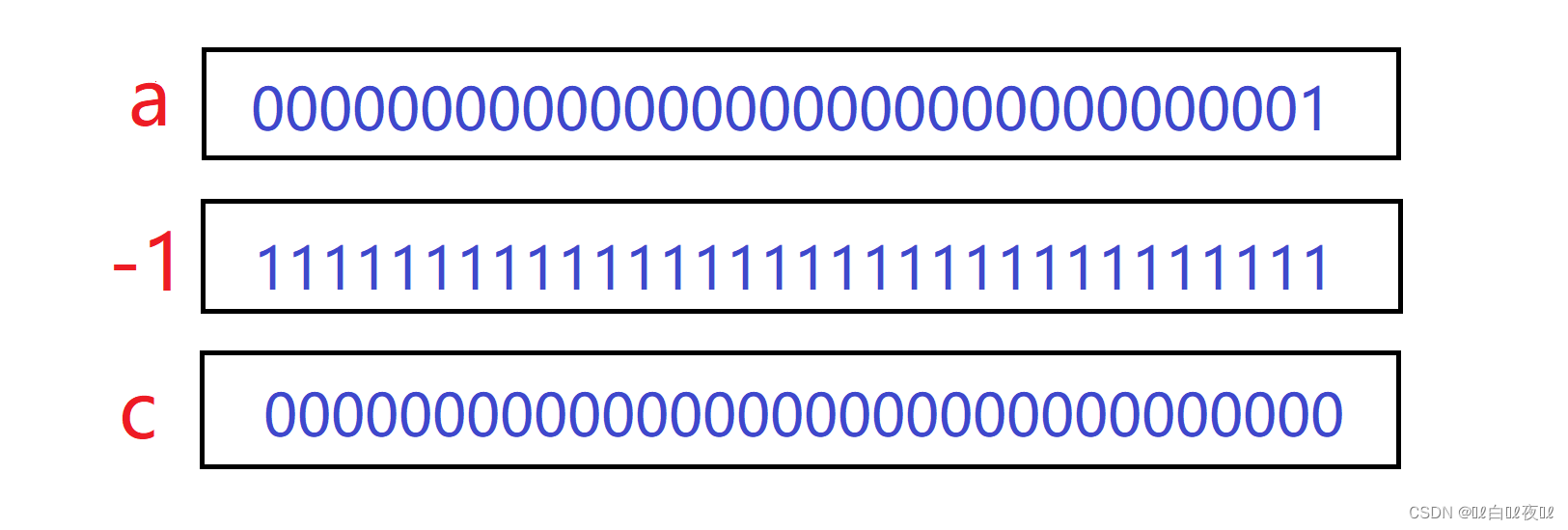
std::cout << "Requesting for charging ... [" << std::min(100.0, progress_ * An addition accumulates , Simulation progress , To 100%, Show complete .
There are three , The other one is 0.02, as follows :
// Copyright 2019 Intelligent Robotics Lab
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
#include <memory>
#include <algorithm>
#include "plansys2_executor/ActionExecutorClient.hpp"
#include "rclcpp/rclcpp.hpp"
#include "rclcpp_action/rclcpp_action.hpp"
using namespace std::chrono_literals;
class MoveAction : public plansys2::ActionExecutorClient
{
public:
MoveAction()
: plansys2::ActionExecutorClient("move", 250ms)
{
progress_ = 0.0;
}
private:
void do_work()
{
if (progress_ < 1.0) {
progress_ += 0.02;
send_feedback(progress_, "Move running");
} else {
finish(true, 1.0, "Move completed");
progress_ = 0.0;
std::cout << std::endl;
}
std::cout << "\r\e[K" << std::flush;
std::cout << "Moving ... [" << std::min(100.0, progress_ * 100.0) << "%] " <<
std::flush;
}
float progress_;
};
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<MoveAction>();
node->set_parameter(rclcpp::Parameter("action_name", "move"));
node->trigger_transition(lifecycle_msgs::msg::Transition::TRANSITION_CONFIGURE);
rclcpp::spin(node->get_node_base_interface());
rclcpp::shutdown();
return 0;
}ros2 launch plansys2_simple_example plansys2_simple_example_launch.py
[INFO] [launch]: All log files can be found below /home/ros/.ros/log/2022-07-06-21-11-30-838227-ros-12774
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [plansys2_node-1]: process started with pid [12776]
[INFO] [move_action_node-2]: process started with pid [12778]
[INFO] [charge_action_node-3]: process started with pid [12780]
[INFO] [ask_charge_action_node-4]: process started with pid [12782]
[charge_action_node-3] RCUTILS_CONSOLE_STDOUT_LINE_BUFFERED is now ignored. Please set RCUTILS_LOGGING_USE_STDOUT and RCUTILS_LOGGING_BUFFERED_STREAM to control the stream and the buffering of log messages.
[plansys2_node-1] RCUTILS_CONSOLE_STDOUT_LINE_BUFFERED is now ignored. Please set RCUTILS_LOGGING_USE_STDOUT and RCUTILS_LOGGING_BUFFERED_STREAM to control the stream and the buffering of log messages.
[move_action_node-2] RCUTILS_CONSOLE_STDOUT_LINE_BUFFERED is now ignored. Please set RCUTILS_LOGGING_USE_STDOUT and RCUTILS_LOGGING_BUFFERED_STREAM to control the stream and the buffering of log messages.
[ask_charge_action_node-4] RCUTILS_CONSOLE_STDOUT_LINE_BUFFERED is now ignored. Please set RCUTILS_LOGGING_USE_STDOUT and RCUTILS_LOGGING_BUFFERED_STREAM to control the stream and the buffering of log messages.
[plansys2_node-1] [INFO] [1657113091.117842286] [domain_expert_lc_mngr]: Creating client for service [domain_expert/get_state]
[plansys2_node-1] [INFO] [1657113091.117985314] [domain_expert_lc_mngr]: Creating client for service [domain_expert/change_state]
[plansys2_node-1] [INFO] [1657113091.118944458] [executor_lc_mngr]: Creating client for service [executor/get_state]
[plansys2_node-1] [INFO] [1657113091.118978916] [executor_lc_mngr]: Creating client for service [executor/change_state]
[plansys2_node-1] [INFO] [1657113091.120056912] [planner_lc_mngr]: Creating client for service [planner/get_state]
[plansys2_node-1] [INFO] [1657113091.120104678] [planner_lc_mngr]: Creating client for service [planner/change_state]
[plansys2_node-1] [INFO] [1657113091.121063103] [problem_expert_lc_mngr]: Creating client for service [problem_expert/get_state]
[plansys2_node-1] [INFO] [1657113091.121096320] [problem_expert_lc_mngr]: Creating client for service [problem_expert/change_state]
[plansys2_node-1] [INFO] [1657113091.123246979] [domain_expert]: [domain_expert] Configuring...
[plansys2_node-1] [INFO] [1657113092.591281768] [domain_expert]: [domain_expert] Configured
[plansys2_node-1] [INFO] [1657113092.591821518] [domain_expert_lc_mngr]: Transition 1 successfully triggered.
[plansys2_node-1] [INFO] [1657113092.592735774] [domain_expert_lc_mngr]: Node domain_expert_lc_mngr has current state inactive.
[plansys2_node-1] [INFO] [1657113092.593341410] [problem_expert]: [problem_expert] Configuring...
[plansys2_node-1] [INFO] [1657113092.593592323] [problem_expert]: [problem_expert] Configured
[plansys2_node-1] [INFO] [1657113092.593980188] [problem_expert_lc_mngr]: Transition 1 successfully triggered.
[plansys2_node-1] [INFO] [1657113092.594893820] [problem_expert_lc_mngr]: Node problem_expert_lc_mngr has current state inactive.
[plansys2_node-1] [INFO] [1657113092.595116986] [planner]: [planner] Configuring...
[plansys2_node-1] [INFO] [1657113092.595572154] [planner]: Created solver : POPF of type plansys2/POPFPlanSolver
[plansys2_node-1] [INFO] [1657113092.595597202] [planner]: [planner] Configured
[plansys2_node-1] [INFO] [1657113092.596173571] [planner_lc_mngr]: Transition 1 successfully triggered.
[plansys2_node-1] [INFO] [1657113092.597047621] [planner_lc_mngr]: Node planner_lc_mngr has current state inactive.
[plansys2_node-1] [INFO] [1657113092.597266099] [executor]: [executor] Configuring...
[plansys2_node-1] [INFO] [1657113092.635329147] [executor]: [executor] Configured
[plansys2_node-1] [INFO] [1657113092.636003817] [executor_lc_mngr]: Transition 1 successfully triggered.
[plansys2_node-1] [INFO] [1657113092.637613423] [executor_lc_mngr]: Node executor_lc_mngr has current state inactive.
[plansys2_node-1] [INFO] [1657113092.637831052] [domain_expert]: [domain_expert] Activating...
[plansys2_node-1] [INFO] [1657113092.637846397] [domain_expert]: [domain_expert] Activated
[plansys2_node-1] [INFO] [1657113092.638013755] [domain_expert_lc_mngr]: Transition 3 successfully triggered.
[plansys2_node-1] [INFO] [1657113092.638161275] [problem_expert]: [problem_expert] Activating...
[plansys2_node-1] [INFO] [1657113092.638173395] [problem_expert]: [problem_expert] Activated
[plansys2_node-1] [INFO] [1657113092.638334715] [problem_expert_lc_mngr]: Transition 3 successfully triggered.
[plansys2_node-1] [INFO] [1657113092.638480864] [planner]: [planner] Activating...
[plansys2_node-1] [INFO] [1657113092.638492468] [planner]: [planner] Activated
[plansys2_node-1] [INFO] [1657113092.638652933] [planner_lc_mngr]: Transition 3 successfully triggered.
[plansys2_node-1] [INFO] [1657113092.638833961] [executor]: [executor] Activating...
[plansys2_node-1] [INFO] [1657113092.638846389] [executor]: [executor] Activated
[plansys2_node-1] [INFO] [1657113092.639011505] [executor_lc_mngr]: Transition 3 successfully triggered.
[plansys2_node-1] [INFO] [1657113092.639378348] [domain_expert_lc_mngr]: Node domain_expert_lc_mngr has current state active.
[plansys2_node-1] [INFO] [1657113092.639805597] [problem_expert_lc_mngr]: Node problem_expert_lc_mngr has current state active.
[plansys2_node-1] [INFO] [1657113092.639997659] [planner_lc_mngr]: Node planner_lc_mngr has current state active.
[plansys2_node-1] [INFO] [1657113092.640170439] [executor_lc_mngr]: Node executor_lc_mngr has current state active.
[plansys2_node-1] Critical Errors Encountered in Domain/Problem File
[plansys2_node-1] --------------------------------------------------
[plansys2_node-1]
[plansys2_node-1] Due to critical errors in the supplied domain/problem file, the planner
[plansys2_node-1] has to terminate. The errors encountered are as follows:
[plansys2_node-1] [INFO] [1657113223.236959183] [executor]: Action askcharge timeout percentage -1.000000
[plansys2_node-1] [INFO] [1657113223.238439887] [executor]: Action charge timeout percentage -1.000000
[plansys2_node-1] [INFO] [1657113223.240075646] [executor]: Action move timeout percentage -1.000000
[plansys2_node-1] [INFO] [1657113223.241757081] [executor]: Action move timeout percentage -1.000000
[plansys2_node-1] [INFO] [1657113223.243454177] [executor]: Action move timeout percentage -1.000000
[plansys2_node-1] [INFO] [1657113223.245104087] [executor]: Action move timeout percentage -1.000000
[plansys2_node-1] [WARN] [1657113223.248743929] [rcl.logging_rosout]: Publisher already registered for provided node name. If this is due to multiple nodes with the same name then all logs for that logger name will go out over the existing publisher. As soon as any node with that name is destructed it will unregister the publisher, preventing any further logs for that name from being published on the rosout topic.
[plansys2_node-1] [WARN] [1657113223.260558208] [rcl.logging_rosout]: Publisher already registered for provided node name. If this is due to multiple nodes with the same name then all logs for that logger name will go out over the existing publisher. As soon as any node with that name is destructed it will unregister the publisher, preventing any further logs for that name from being published on the rosout topic.
Requesting for charging ... [100%]
Charging ... [100%]
Moving ... [100%]
Moving ... [100%]
Moving ... [100%]
Moving ... [100%]
[plansys2_node-1] [INFO] [1657113304.791210722] [executor]: Plan Succeeded
[plansys2_node-1] [PublisherZMQ] Server quitting.
[plansys2_node-1] [PublisherZMQ] just died. Exception Context was terminated
[plansys2_node-1] [PublisherZMQ] Publisher quitting.
[plansys2_node-1] [PublisherZMQ] just died. Exception Context was terminated
边栏推荐
猜你喜欢
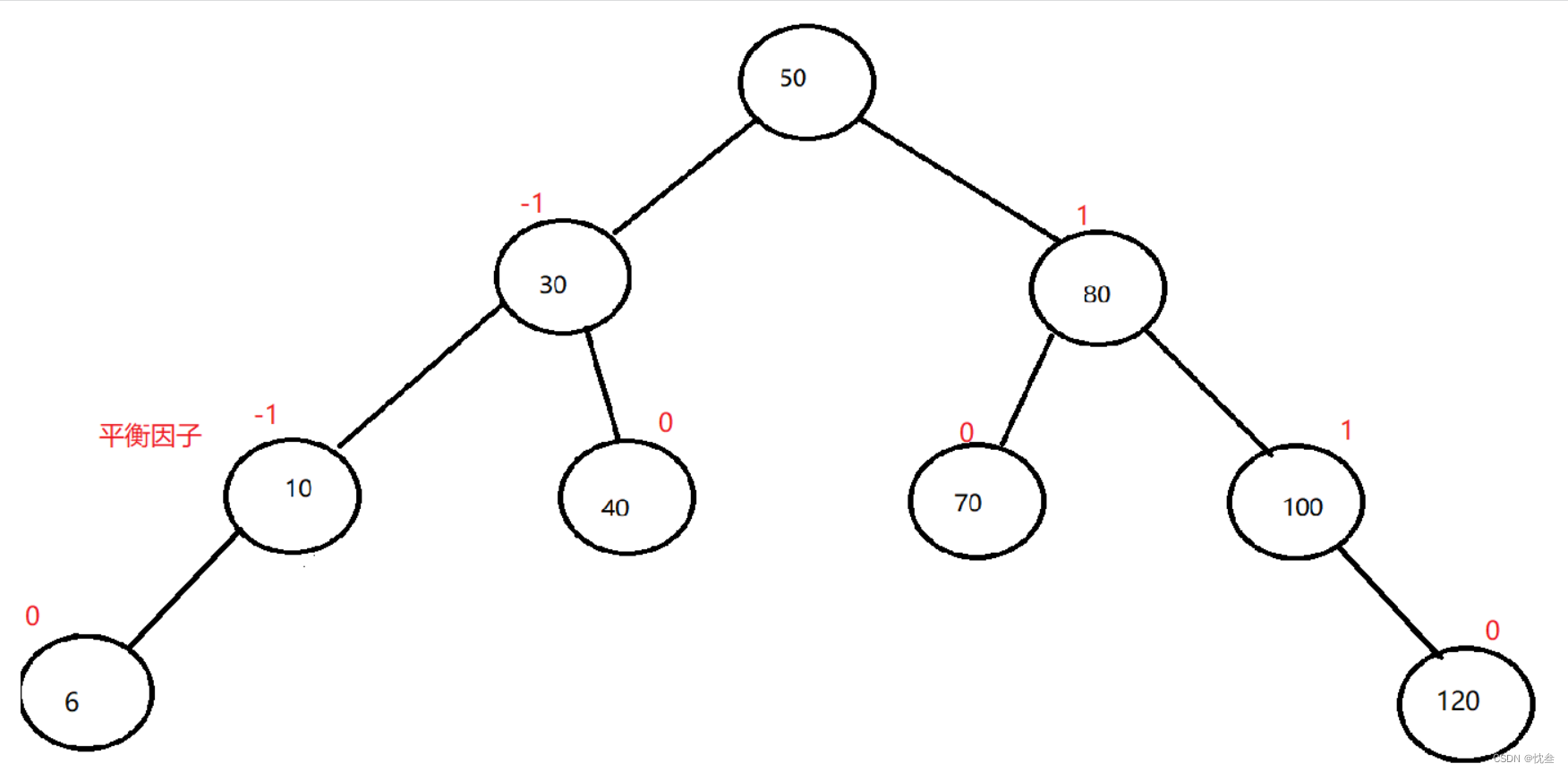
Implementation of AVL tree
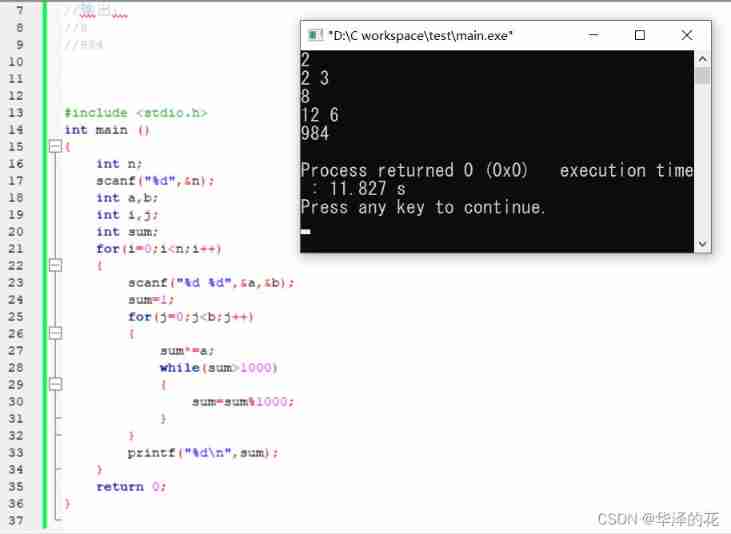
1090: integer power (multi instance test)
Communication between non parent and child components

Model application of time series analysis - stock price prediction
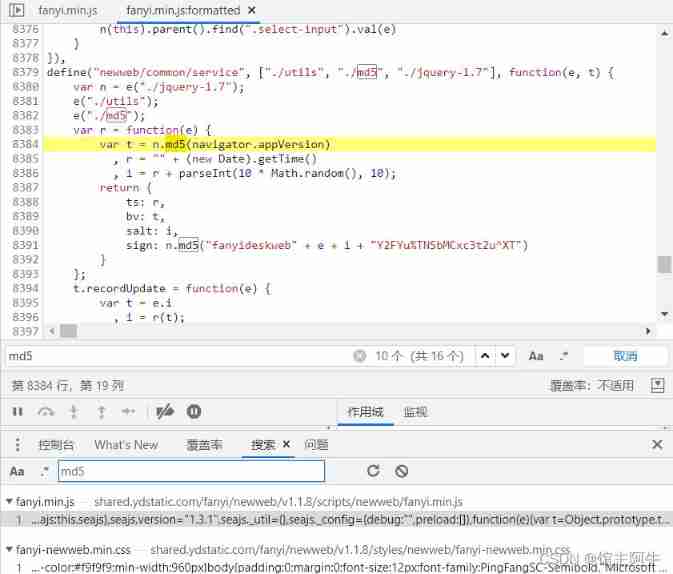
English translation is too difficult? I wrote two translation scripts with crawler in a rage
Stockage et pratique des données en langage C (haut niveau)
虚拟机的作用
Advanced level of C language (high level) pointer
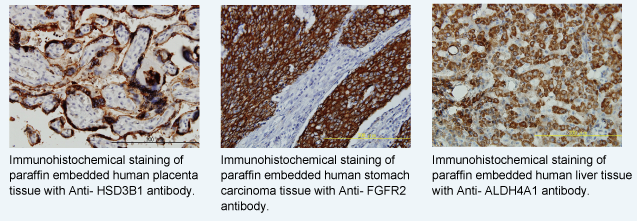
Abnova immunohistochemical service solution
Flexible layout (II)
随机推荐
Convolutional neural network -- understanding of pooling
云备份项目
外包幹了三年,廢了...
Circulating tumor cells - here comes abnova's solution
Talk about seven ways to realize asynchronous programming
Academic report series (VI) - autonomous driving on the journey to full autonomy
Databinding exception of kotlin
Readonly read only
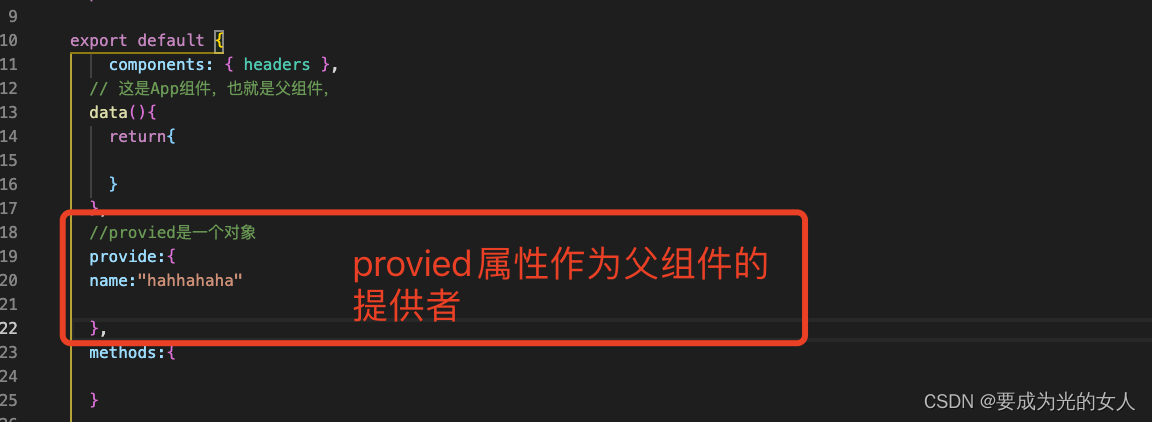
Pass parent component to child component: props
Initial experience of teambiion network disk (Alibaba cloud network disk)
Blue Bridge Cup Netizen age (violence)
【云原生】内存数据库如何发挥内存优势
Advanced practice of C language (high level) pointer
js小练习----分时提醒问候、表单密码显示隐藏效果、文本框焦点事件、关闭广告
ViewModelProvider. Of obsolete solution
Wechat applet full stack development practice Chapter 3 Introduction and use of APIs commonly used in wechat applet development -- 3.9 introduction to network interface (IX) extending the request3 met
Stockage et pratique des données en langage C (haut niveau)
Implementation of AVL tree
Detailed explanation of neo4j installation process
$refs:组件中获取元素对象或者子组件实例: