当前位置:网站首页>[rtklib] preliminary practice of using robust adaptive Kalman filter under RTK
[rtklib] preliminary practice of using robust adaptive Kalman filter under RTK
2022-07-06 12:52:00 【Proletarians】
One 、 background
I used to take measurements when I was in school , Do the static calculation of the coordinates of the station, or control it on the campus rtk Survey topographic points , They are all in a wide field of vision , Exercise slowly . Now use consumer grade receivers , In the dynamic and complex environment of the city , For example, crossing the overpass 、 Under the shade of trees 、 Next to the tall building , There will be a lot of gross errors and cycle slips in the measured values , Very often , It affects the measurement model ; meanwhile , The motion state of the carrier is also unclear , for example , Turn at the intersection , Slow down when encountering pedestrian cars , Speed up after the green light , It affects the dynamic model .
In view of the two aspects of the functional model described above , So in use ekf When , My heart panicked . At this time, consider using robust adaptive Kalman filter , First, robust estimation adjusts the measurement noise matrix , The second is to adaptively adjust the dynamic model , Balance the contributions of both .
Two 、vs Post treatment practice
stay rtklib in , We're doing vs post-processing post When , If Galileo is used 、glonass etc. , Pay attention to defining the macro of the system in the header file , Otherwise, all you get is gps Of rtk result . Since it is dynamic rtk, Then the receiver dynamic Option to open , This can be changed directly in the configuration file . There are two steps to follow , The measurement noise matrix obtained from the determination of adaptive factors and robust estimation .
2.1 Determination of adaptive factor
The adaptive factor can be determined from two aspects , One is the innovation vector , That is, through one-step predicted value and measured value , For the first time ddres Got v; Second, through the status discrepancy , That is, through the state vector at the current time and the modulus of one-step predicted value .
In practical use , It is not recommended to use status discrepancy , Because sometimes the difference in this state is too big , Innovation vector can better reflect the disturbance of dynamic system .
The sample code is as follows :
/* adaptive factor resolved by predicted residual */
static double adaptive_factor(const double *v, int nv)
{
double sum = 0.0,ret;
double c0 = 1.5, c1 = 8.0;
for (int i = 0; i < nv; i++) {
sum += v[i] * v[i];
}
sum = sqrt(sum);
if (sum>c1)
{
ret = 0;
}
else if(sum <= c0) {
ret = 1;
}
else {
ret = (c0 / sum)*SQRT((c1 - sum) / (c1 - c0));
}
return ret;
}
2.2 Tolerance M It is estimated that
Robust estimation is calculated by using a posteriori measurement residual ,rtk Double difference measurements are relevant , Then the equivalent weight strategy cannot be used in robust estimation , Refer to Liu Jingnan's calculation method , And Yang Yuanxi's two factor model is actually the same thing .
The sample code is as follows :
/* Robust estimation algorithm ,RTK Correlation between double difference observations , Equivalent weight scheme cannot be adopted */
/* v I Posterior observation residual vector */
/* R I Measurement noise variance - Covariance matrix */
/* vflag I Double difference satellite innovation field */
/* nv I Measurement noise variance - Covariance matrix dimension namely R The size is (nv*nv) */
static double * robust_estimate(const double *v, const double *R, const int *vflg, int nv)
{ // nv Represents the measurement noise variance - Covariance matrix R Dimension of ,RTK Measurement noise matrix of R It's related. , It is necessary to determine the equivalent variance - Covariance matrix R_, Refer to Liu Jingnan's calculation method
int i, j, sat1, sat2, type, freq;
double *R_;
double w,c=2.0,p; // w Represents the standardized residual ,c~[1.5,3.0],p Indicates the correlation coefficient
R_ = mat(nv, nv);
// step1 First save the diagonal elements
for (i = 0; i < nv; i++) {
w = 0.0;
sat1 = (vflg[i] >> 16) & 0xFF;
sat2 = (vflg[i] >> 8) & 0xFF;
type = (vflg[i] >> 4) & 0xF; // type == 0 ? "L" : (type == 1 ? "P" : "C")
freq = vflg[i] & 0xF;
// Standardized residuals of post test observation residuals
w = fabs(v[i]) / R[i + i*nv];
R_[i + i*nv] = (w < c) ? R[i + i*nv] : w*w*R[i + i*nv];
}
// step2 Then fill in the non diagonal elements , Use the correlation coefficient p Fill in R_
for (i = 0; i < nv; i++) {
for (j = 0; j < nv; j++) {
if (i == j) continue;
p = R[j + i*nv] / (sqrt(R[i + i*nv] * R[j + j*nv]));
R_[j + i*nv] = p*sqrt(R_[i + i*nv] * R_[j + j*nv]);
}
}
return R_;
}
The steps are described in the notes , But this strategy is not right ddpr and ddcp Treat separately , It should be handled separately , because ddcp It may be caused by Zhou Tiao not being eliminated completely , Then the blur will be reset , Just let the code flow out , Let's be a reference .
2.3 Other notes
The adaptive factor is obtained , In Kalman filter filter Function k The calculation of only needs to be made by 1.0 become 1.0/factor that will do .
Of the state vector calculated in the current epoch Pp, I added this
if (!(info=matinv(Q,m))) {
matmul("NN",n,m,m,1.0,F,Q,0.0,K); /* K=P*H*Q^-1 */
matmul("NN",n,1,m,1.0,K,v,1.0,xp); /* xp=x+K*v */
matmul("NT",n,n,m,-1.0,K,H,1.0,I); /* Pp=(I-K*H')*P */
matmul("NN",n,n,n,1.0,I,P,0.0,Pp);
// Zhang Youmin
//matmul("NT", n, n, n, 1.0, Pp, I, 0.0, Pp);
//matmul("NT", m, n, m, 1.0, R, K, 0.0, F_);
//matmul("NN", n, n, m, 1.0, K, F_, 1.0, Pp);
}
result
The result of the test is not good , How to let it out , Ha ha ha . Just to give you a way of thinking ~
边栏推荐
- Teach you to release a DeNO module hand in hand
- There is no red exclamation mark after SVN update
- Theoretical derivation of support vector machine
- Fairygui joystick
- JUC forkjoin and completable future
- Mixed use of fairygui button dynamics
- [leetcode622] design circular queue
- (3) Introduction to bioinformatics of R language - function, data Frame, simple DNA reading and analysis
- Get the position of the nth occurrence of the string
- 抗差估计在rtklib的pntpos函数(标准单点定位spp)中的c代码实现
猜你喜欢
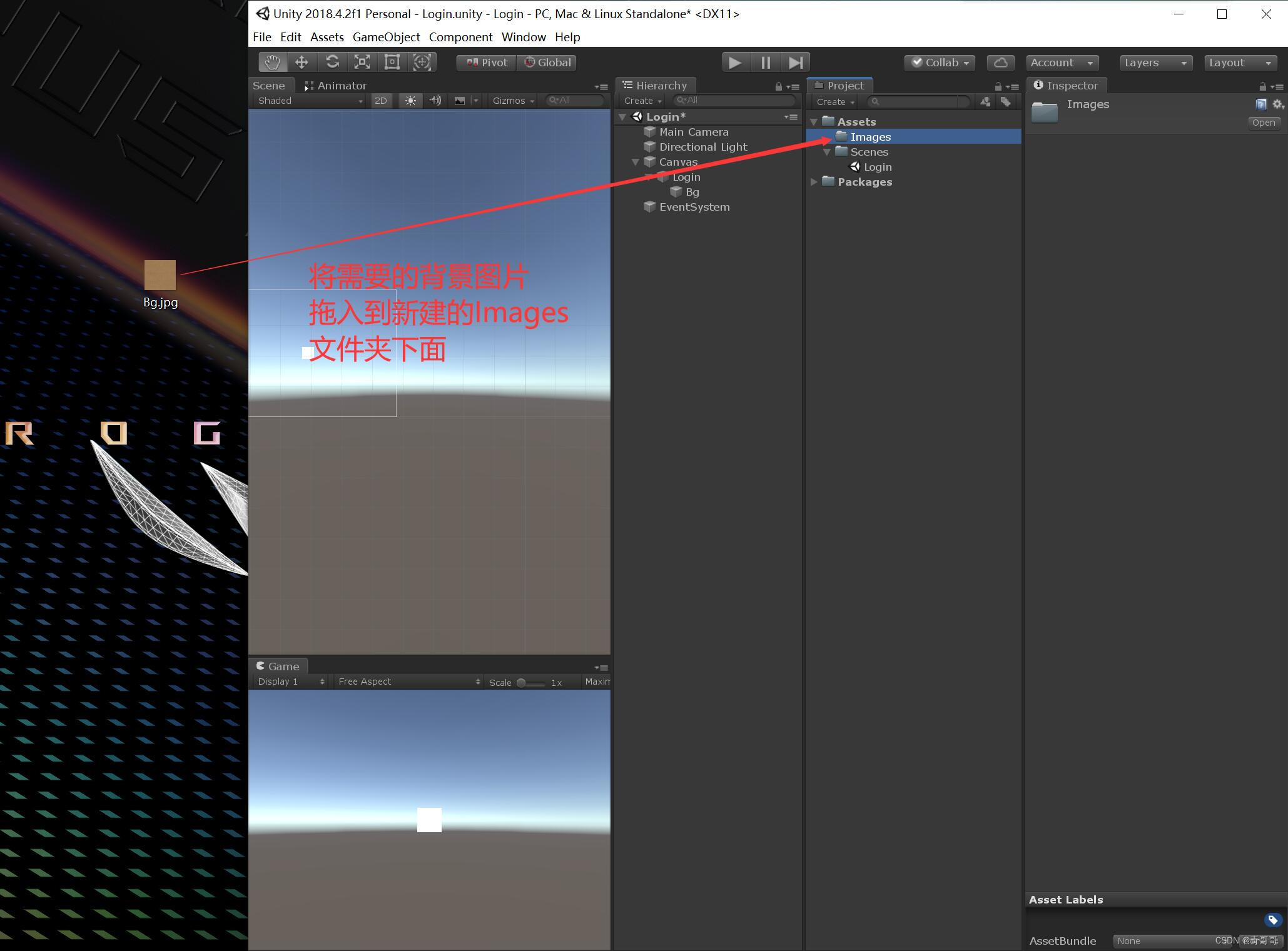
Unity3d makes the registration login interface and realizes the scene jump

Prove the time complexity of heap sorting
Unity3D制作注册登录界面,并实现场景跳转
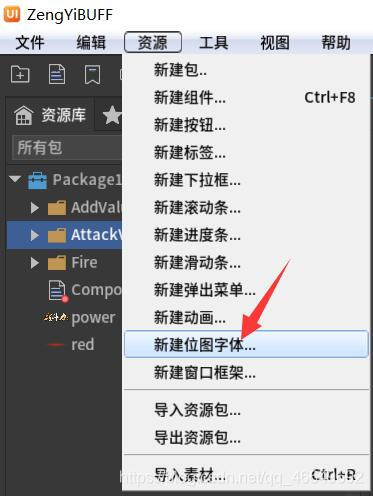
FairyGUI增益BUFF数值改变的显示
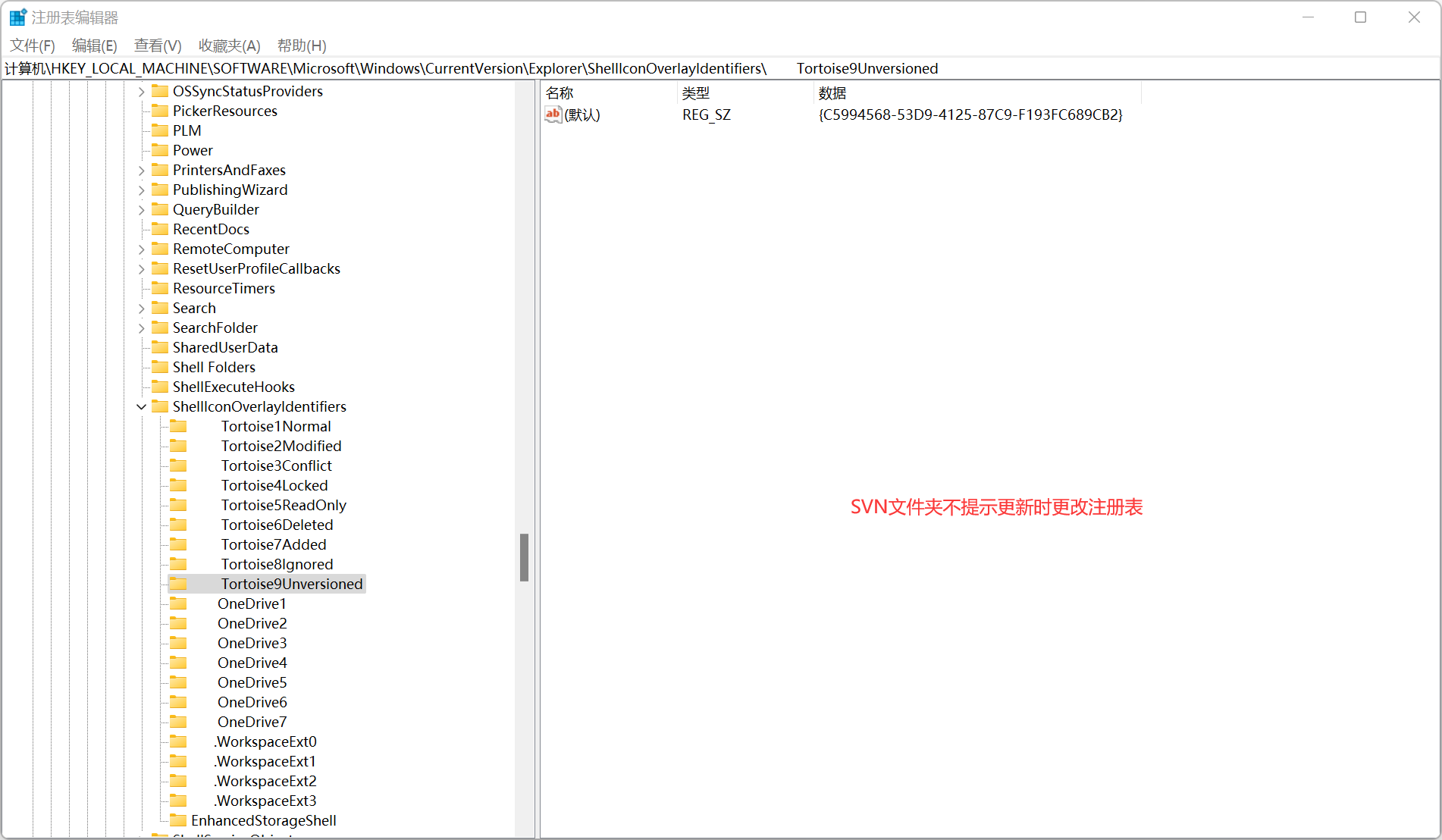
There is no red exclamation mark after SVN update
What are the advantages of using SQL in Excel VBA
![[算法] 剑指offer2 golang 面试题1:整数除法](/img/e6/f17135207b3540ec58e5a9eed54220.png)
[算法] 剑指offer2 golang 面试题1:整数除法

Halcon knowledge: gray_ Tophat transform and bottom cap transform
音乐播放(Toggle && PlayerPrefs)
![[算法] 剑指offer2 golang 面试题13:二维子矩阵的数字之和](/img/17/e7c9bfa867030af97eb66a7932c7e3.png)
[算法] 剑指offer2 golang 面试题13:二维子矩阵的数字之和
随机推荐
Unity3D基础入门之粒子系统(属性介绍+火焰粒子系统案例制作)
Naive Bayesian theory derivation
[algorithme] swordfinger offer2 golang question d'entrevue 2: addition binaire
3月15号 Go 1.18 正式版发布 了解最新特色以及使用方法
Acwing-116 pilot brother
FairyGUI簡單背包的制作
Particle system for introduction to unity3d Foundation (attribute introduction + case production of flame particle system)
FairyGUI复选框与进度条的组合使用
Expected value (EV)
FairyGUI摇杆
Servlet
[算法] 剑指offer2 golang 面试题2:二进制加法
Game 280 weekly
NRF24L01 troubleshooting
Halcon knowledge: gray_ Tophat transform and bottom cap transform
[algorithm] sword finger offer2 golang interview question 1: integer division
2022国赛Re1 baby_tree
FairyGUI增益BUFF数值改变的显示
Fairygui joystick
Office prompts that your license is not genuine pop-up box solution