当前位置:网站首页>抗差估计在rtklib的pntpos函数(标准单点定位spp)中的c代码实现
抗差估计在rtklib的pntpos函数(标准单点定位spp)中的c代码实现
2022-07-06 09:18:00 【Proletarians】
一、背景
在rtklib中spp定位算法主要是在pntpos函数中实现,pvt在pntpos实现的那是淋漓尽致啊。
1. 从观测值类型上来说:
(1)如果我们有伪距观测值,那么可以在estpos中进行定位和接收机钟差稳定度分析;(2)如果我们还有多普勒频移,那么可以在estvel中进行定速,当然,如果我们还有载波观测值的话,也可以通过历元间载波差进行定速。
2. 从观测值频率上来说:
(1)如果我们是双频伪距观测值的话,那么根据我们对电离层的处理策略不同,使用的观测值类型也是不同的,具体来说,如果我们使用消电离层组合的话,那么需要使用双频观测值进行伪距消电离层组合得到组合观测值;如果我们使用的是brdc处理电离层延迟,那么我们只使用L1伪距观测值,如果我们使用TEQC进行数据质量分析,就会发现L1比L2的mp1要小于mp2,另外,我们在进行rtk的时候,有效卫星数的计算也是根据L1来累加的。
3. 抗差spp的必要性:
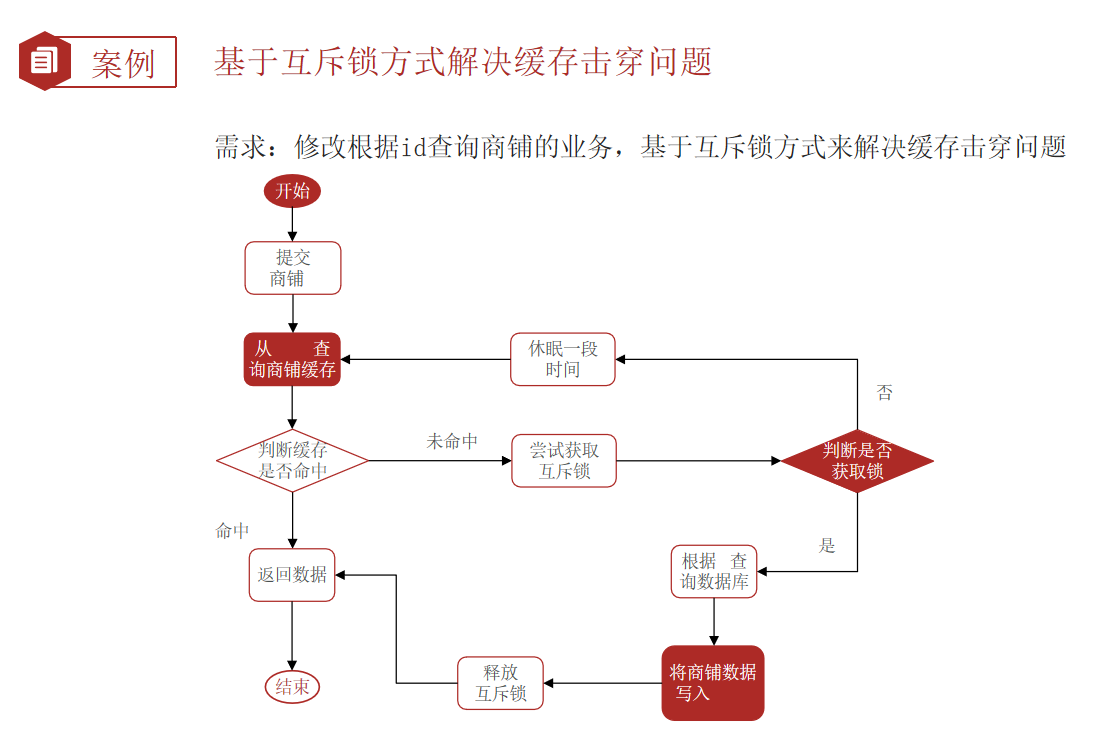
为什么要进行spp的抗差估计呢?因为我们在进行高精度定位的时候,spp是给kalman filter初值,如果这个初值不准的话,那么我们经过filter得到的float解偏离实际位置,就会造成fix后的解也是不对的,例如飞点的现象。
4. spp数学模型简介:
在掌握了spp的数学模型基础上,数学模型由函数模型和随机模型组成,函数模型就是伪距观测方程,随机模型包括先验随机模型(等权模型、高度角随机模型、信噪比随机模型)和验后随机模型(helmet方差分量估计),函数模型可以让我们得到误差方程v=Bx-l,随机模型让我们得到了权阵P。那么在rtklib的spp中,是使用加权迭代最小二乘来得到dx,再和初值x0相加即可得到pos和dt值。
5.spp随机模型:
关于随机模型,想多说一点,如果有朋友想使用helmet方差分量估计,那么要保证先验权阵尽量准确,否则就是瞎扯了,其实在rtklib中varerr函数中的权重比,我们可以使用helmet去得到,例如,gps和bds在spp中权重是一样的吗,即使在bds中,geo/meo/igso的权重是一样的吗?大家可以去实践一下。另外,rtklib的高度角随机模型中的sin(el)没有求平方,可以使用SQR(sin(el))。说到这儿,我有个补充,观测误差的方差是由三部分组成,卫星位置方差(卫星端),大气延迟方差(传播端,电离层、对流层),使用随机模型求得的量测误差(接收机端,也就是使用随机模型的地方)。
二、抗差spp实现
在rtklib中,历元k存在多次迭代,迭代次数最多是10,即使是在首次定位的情况下,即状态向量(跟未知向量、未知参数一个意思)全为0的时候,也只需要6次迭代就可以得到最终的结果,后续历元一般需要3次才能得到最终结果,当然了,得到了结果可能是不正确的,这个时候valpos函数就起作用了,valpos中主要通过卡方检验和dop值检验两方面进行有效性检测,如果失败了,那么该历元的结果就不输出了,这点可能有些朋友不会注意到,大家的焦点可能在lsq比较多吧。
2.1.抗差估计代码
rtklib中spp上应用抗差估计代码如下,我是先通过标准化残差找到最大的那个值进行剔除,我这里只有零权和保权处理,具体应用数据具体再修改细节吧。代码如下:
/* compare residual data -------------------------------------------------*/
static int cmpres(const void *p1, const void *p2)
{
double *q1 = (double *)p1, *q2 = (double *)p2;
double delta = *q1 - *q2;
return delta<-0.0 ? -1 : (delta>0.0 ? 1 : 0);
}
/* estimate receiver position ------------------------------------------------*/
static int estpos(const obsd_t *obs, int n, const double *rs, const double *dts,
const double *vare, const int *svh, const nav_t *nav,
const prcopt_t *opt, sol_t *sol, double *azel, int *vsat,
double *resp, char *msg)
{
double x[NX]={0},dx[NX],Q[NX*NX],*v,*H,*v_,*var,sig;
int i,j,k,info,stat,nv,ns;
double k0=8.0;
int ref = 0; // robust estimate start flag
trace(3,"estpos : n=%d\n",n);
v=mat(n+4,1); H=mat(NX,n+4); var=mat(n+4,1);
v_ = mat(n + 4, 1); // deal with residual(derive from [v])
for (i=0;i<3;i++) x[i]=sol->rr[i];
for (i=0;i<MAXITR;i++) {
/* pseudo range residuals */
nv=rescode(i,obs,n,rs,dts,vare,svh,nav,x,opt,v,H,var,azel,vsat,resp,
&ns);// H是按照nv*NX排列的,即nv代表行数,NX代表列数,恒为7
matcpy(v_, v, ns, 1);
// predicted normalized residual
qsort(v_, ns, sizeof(double), cmpres);
if (fabs(v_[0] < 100 && fabs(v_[ns - 1]) < 100))
{
ref = 1;
}
if (ref == 1) // robust estimate start
{
matcpy(v_, v, ns, 1);
for (j = 0; j < ns; j++)
{
v_[j] = fabs(v_[j]) / sqrt(var[j]);
}
qsort(v_, ns, sizeof(double), cmpres);
// local variable
int v_max_index=0; // the biggest normalized residual index
double v_max= v_[ns - 1]; // the biggest normalized residual value
matcpy(v_, v, ns, 1);
for (j = 0; j < ns; j++)
{
v_[j] = sqrt(SQR(v_[j]) / var[j]);
if (fabs(v_[j] -v_max)<1e-9)
{
v_max_index = j;
break;
}
}
if (v_max > k0)
{
if (ns > 4)
{
v[v_max_index] = 0;
for (k = 0; k < NX; k++) H[k + v_max_index*NX] = 0;
}
}
}
if (nv<NX) {
sprintf(msg,"lack of valid sats ns=%d",nv);
break;
}
/* weight by variance */
for (j=0;j<nv;j++) {
sig=sqrt(var[j]);
v[j]/=sig;
for (k=0;k<NX;k++) H[k+j*NX]/=sig;
}
/* least square estimation */
if ((info=lsq(H,v,NX,nv,dx,Q))) {
sprintf(msg,"lsq error info=%d",info);
break;
}
for (j=0;j<NX;j++) x[j]+=dx[j];
if (norm(dx,NX)<1E-4) {
sol->type=0;
sol->time=timeadd(obs[0].time,-x[3]/CLIGHT);
sol->dtr[0]=x[3]/CLIGHT; /* receiver clock bias (s) */
sol->dtr[1]=x[4]/CLIGHT; /* glo-gps time offset (s) */
sol->dtr[2]=x[5]/CLIGHT; /* gal-gps time offset (s) */
sol->dtr[3]=x[6]/CLIGHT; /* bds-gps time offset (s) */
for (j=0;j<6;j++) sol->rr[j]=j<3?x[j]:0.0;
for (j=0;j<3;j++) sol->qr[j]=(float)Q[j+j*NX];
sol->qr[3]=(float)Q[1]; /* cov xy */
sol->qr[4]=(float)Q[2+NX]; /* cov yz */
sol->qr[5]=(float)Q[2]; /* cov zx */
sol->ns=(unsigned char)ns;
sol->age=sol->ratio=0.0;
/* validate solution */
if ((stat=valsol(azel,vsat,n,opt,v,nv,NX,msg))) {
sol->stat=opt->sateph==EPHOPT_SBAS?SOLQ_SBAS:SOLQ_SINGLE;
}
free(v); free(H); free(var);
return stat;
}
}
if (i>=MAXITR) sprintf(msg,"iteration divergent i=%d",i);
free(v); free(H); free(var);
return 0;
}
2.2.数据测试
使用自测的一段数据,强信号,开阔天空测得的静态数据,头文件中的信息如下: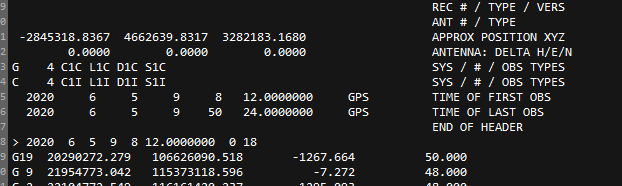
我在历元[2020 6 5 9 8 14.0000000]对G09卫星伪距观测值施加100m的粗差,即由21954773.950变成了21954873.950。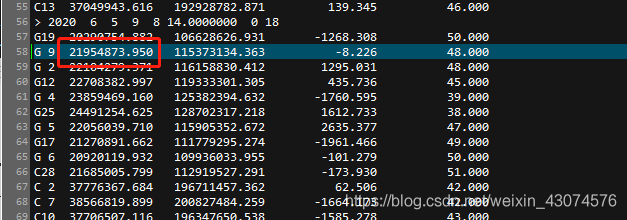
不使用抗差估计,直接由迭代最小二乘得到的结果是:
那么如果使用抗差估计得到的结果是: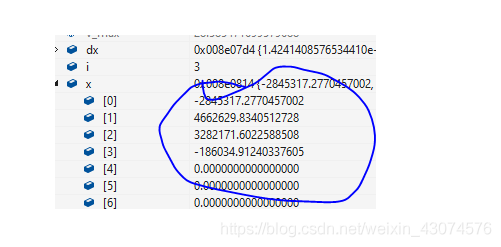
前两个历元的s观测值没有粗差污染,其spp结果分别为: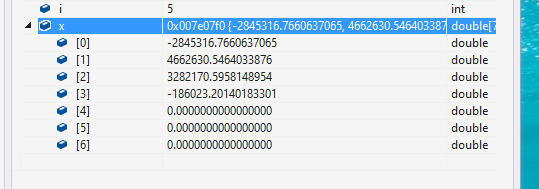
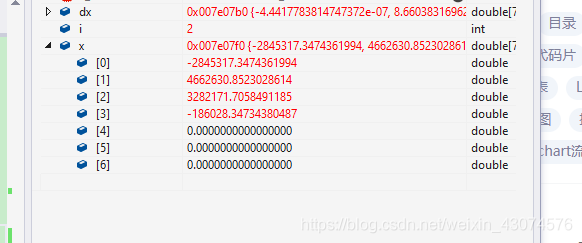
比较可知抗差spp有比较好的可靠性和定位精度。
// 更新于2020.11.27 01:36:00
边栏推荐
- FairyGUI簡單背包的制作
- [Red Treasure Book Notes simplified version] Chapter 12 BOM
- CUDA C programming authoritative guide Grossman Chapter 4 global memory
- 程序设计大作业:教务管理系统(C语言)
- Whistle+switchyomega configure web proxy
- Unity3D摄像机,键盘控制前后左右上下移动,鼠标控制旋转、放缩
- Teach you to release a DeNO module hand in hand
- Office prompts that your license is not genuine pop-up box solution
- 單片機藍牙無線燒錄
- SVN更新后不出现红色感叹号
猜你喜欢

Lock wait timeout exceeded try restarting transaction
FairyGUI摇杆
NovAtel 板卡OEM617D配置步骤记录
Database course design: college educational administration management system (including code)
Latex learning
Postman 中级使用教程【环境变量、测试脚本、断言、接口文档等】
Unity3D制作注册登录界面,并实现场景跳转
FairyGUI循環列錶
Redis cache update strategy, cache penetration, avalanche, breakdown problems
FairyGUI簡單背包的制作
随机推荐
KF UD分解之伪代码实现进阶篇【2】
Compilation principle: preprocessing of source program and design and implementation of lexical analysis program (including code)
Game 280 weekly
PR 2021 quick start tutorial, first understanding the Premiere Pro working interface
编译原理:源程序的预处理及词法分析程序的设计与实现(含代码)
Latex learning
Flink late data processing (3)
Special palindromes of daily practice of Blue Bridge Cup
[leetcode19] delete the penultimate node in the linked list
There is no red exclamation mark after SVN update
Intermediate use tutorial of postman [environment variables, test scripts, assertions, interface documents, etc.]
地球围绕太阳转
[offer18] delete the node of the linked list
Unity场景跳转及退出
[offer29] sorted circular linked list
FairyGUI简单背包的制作
Redis based distributed ID generator
Fairygui loop list
In 2020, the average salary of IT industry exceeded 170000, ranking first
Classification, understanding and application of common methods of JS array