当前位置:网站首页>Small guide for rapid formation of manipulator (12): inverse kinematics analysis
Small guide for rapid formation of manipulator (12): inverse kinematics analysis
2022-07-07 20:23:00 【Lie on me】
Directory :
Quick completion guide of mechanical arm ( zero ): Main contents and analysis methods of the guide
Quick completion guide of mechanical arm ( One ): The development of manipulator
Quick completion guide of mechanical arm ( Two ): Application of mechanical arm
Quick completion guide of mechanical arm ( 3、 ... and ): Mechanical structure of mechanical arm
Quick completion guide of mechanical arm ( Four ): Reducer of key components of mechanical arm
Quick completion guide of mechanical arm ( 5、 ... and ): End actuators
Quick completion guide of mechanical arm ( 6、 ... and ): Stepper motor driver
Quick completion guide of mechanical arm ( 7、 ... and ): Description method of robot arm posture
Quick completion guide of mechanical arm ( 8、 ... and ): Kinematic modeling ( standard DH Law )
Quick completion guide of mechanical arm ( Nine ): Forward kinematics analysis
Quick completion guide of mechanical arm ( Ten ): Reachable workspace
Quick completion guide of mechanical arm ( Twelve ): Inverse kinematics analysis
******************** Here is the main body ********************
stay guide ( Nine ) We have obtained the functional relationship between the joint variable and the position and orientation of the end effector , namely Forward kinematics equation . But in practice , We often need to solve the corresponding joint variables through the given pose of the end effector , To determine the rotation angle of each joint , Then control the manipulator to complete the movement in space .
One 、 The introduction
1. Number of inverse solutions of manipulator
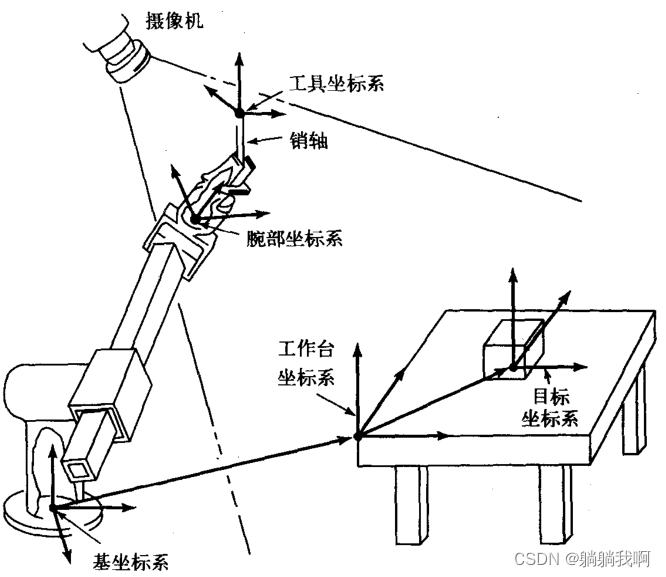
The solution of the inverse kinematics problem of the series manipulator is more complex than the forward kinematics problem . The degree of freedom of the manipulator studied in this paper is 6, In the analysis of inverse kinematics problems, it is necessary to align the sub transformation matrix ![]() Independent of each other 6 A nonlinear transcendental equation is solved . The equations contain 6 An unknown quantity , The existence of solutions and the number of solutions are determined by the kinematic structure of the arm 、 Whether the target point is located Flexible workspace And the restrictions on joints in the program . When there is a feasible solution , Its number is usually not unique , For a six degree of freedom manipulator , At most 16 Two different solutions , Get the number and DH In the parameter a(Oi And Oi' Distance between ) The relationship is shown in the following table .
Independent of each other 6 A nonlinear transcendental equation is solved . The equations contain 6 An unknown quantity , The existence of solutions and the number of solutions are determined by the kinematic structure of the arm 、 Whether the target point is located Flexible workspace And the restrictions on joints in the program . When there is a feasible solution , Its number is usually not unique , For a six degree of freedom manipulator , At most 16 Two different solutions , Get the number and DH In the parameter a(Oi And Oi' Distance between ) The relationship is shown in the following table .
| ai | Number of inverse solutions |
| a1=a3=a5=0 | ≤4 |
| a3=a5=0 | ≤8 |
| a3=0 | ≤16 |
| All ai≠0 | ≤16 |
2.pieper The criterion

obviously , It is of great significance to judge the existence of the solution before solving the inverse kinematics of the manipulator . Current research shows , All series type 6 All manipulators with degrees of freedom are solvable , But this kind of solution can only be obtained by numerical solution , It is difficult to calculate , High complexity . therefore , Before determining the inverse kinematics solution , It is necessary for us to explore whether the analytical solution of the inverse kinematics of the manipulator exists ,Pieper Criterion is a commonly used criterion in robot field to judge the existence of analytical solutions .
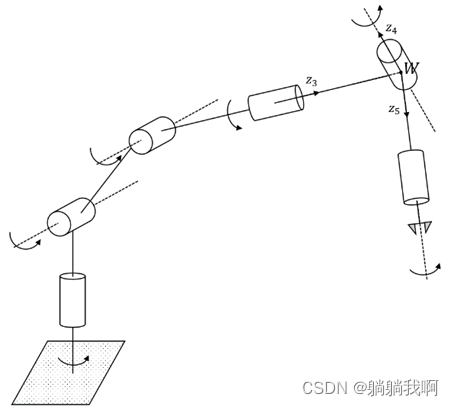
Pieper In his paper, he pointed out :6 The sufficient condition for the existence of an analytical solution of a DOF Manipulator is that the rotation axes of three adjacent joints intersect at a point . To meet this condition and reduce control costs , Most Manipulators on the market are designed according to this , Have a specific structure , Such as manipulator with spherical wrist , As shown in the figure below .
Two 、 Solution method of inverse kinematics of manipulator
Solution of inverse kinematics
边栏推荐
- VMWare中虚拟机网络配置
- The boundary of Bi: what is bi not suitable for? Master data, Martech? How to expand?
- H3C S7000/S7500E/10500系列堆叠后BFD检测配置方法
- Micro service remote debug, nocalhost + rainbow micro service development second bullet
- Nebula Importer 数据导入实践
- 使用 BR 恢复 Azure Blob Storage 上的备份数据
- 微服务远程Debug,Nocalhost + Rainbond微服务开发第二弹
- 恢复持久卷上的备份数据
- 如何挑选基金产品?2022年7月份适合买什么基金?
- Machine learning notes - explore object detection datasets using streamlit
猜你喜欢

测量楼的高度
微服务远程Debug,Nocalhost + Rainbond微服务开发第二弹

ASP.NET学习& asp‘s one word
机械臂速成小指南(十一):坐标系的标准命名

机械臂速成小指南(十二):逆运动学分析
Dachang classic pointer written test questions
一. 基础概念
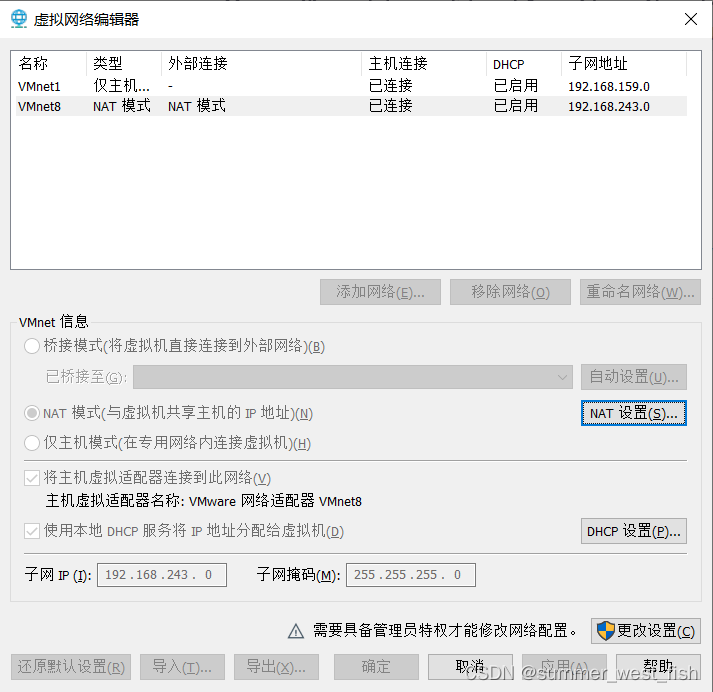
VMWare中虚拟机网络配置
Micro service remote debug, nocalhost + rainbow micro service development second bullet
Nebula importer data import practice
随机推荐
Micro service remote debug, nocalhost + rainbow micro service development second bullet
POJ 1742 Coins ( 单调队列解法 )「建议收藏」
CUDA versions are inconsistent, and errors are reported when compiling apex
【mysql篇-基础篇】事务
Machine learning notes - explore object detection datasets using streamlit
深度学习模型压缩与加速技术(七):混合方式
Don't fall behind! Simple and easy-to-use low code development to quickly build an intelligent management information system
【Auto.js】自动化脚本
Data island is the first danger encountered by enterprises in their digital transformation
ISO 26262 - 基于需求测试以外的考虑因素
有了ST7008, 蓝牙测试完全拿捏住了
Gorilla official: sample code for golang to open websocket client
Force buckle 1232 Dotted line
如何满足医疗设备对安全性和保密性的双重需求?
开发一个小程序商城需要多少钱?
MRS离线数据分析:通过Flink作业处理OBS数据
【解决】package ‘xxxx‘ is not in GOROOT
【网络原理的概念】
H3C S7000/S7500E/10500系列堆叠后BFD检测配置方法
使用高斯Redis实现二级索引