当前位置:网站首页>Interesting practice of robot programming 16 synchronous positioning and map building (SLAM)
Interesting practice of robot programming 16 synchronous positioning and map building (SLAM)
2022-07-05 01:28:00 【zhangrelay】
360 Laser is used to avoid obstacles , How can that be? , It's totally overqualified ……
stay Gazebo In the simulator SLAM when , Various environments and robot models can be selected or created in the virtual world .SLAM Simulation and Practice TurtleBot3 Of SLAM Very similar .
Through the three-dimensional environment of the keyboard remote control and autonomous obstacle avoidance driving , Have fully mastered the basic use of , Next entry SLAM link .
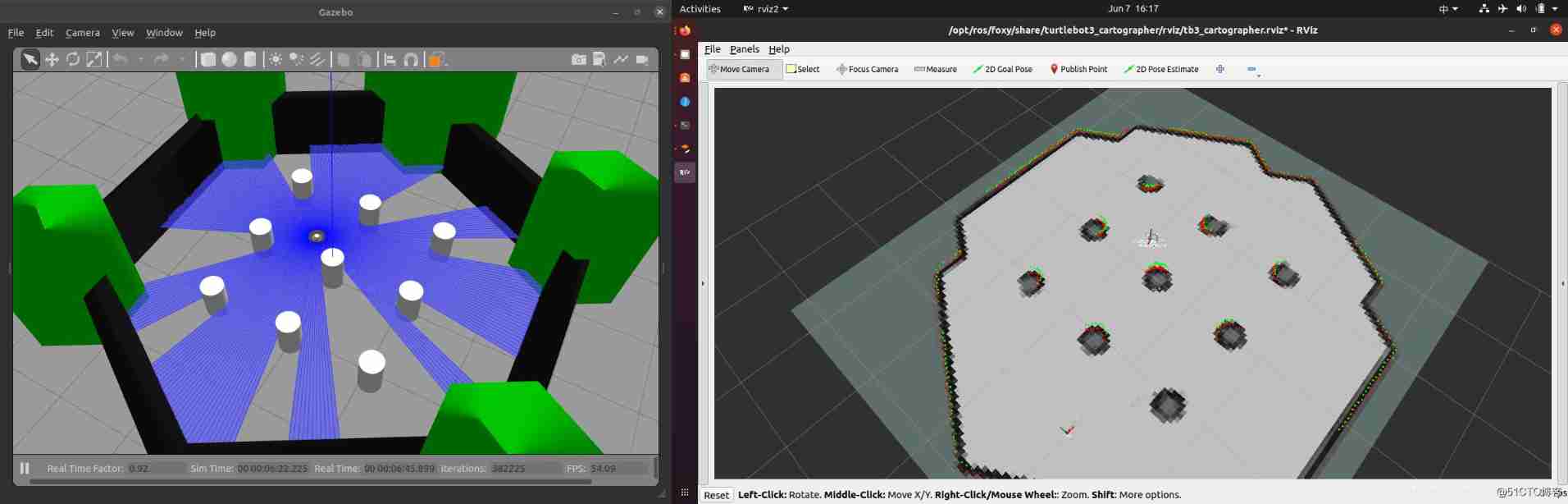
The effect is shown below :
This article does not contain SLAM Algorithm details , Follow up blog updates .
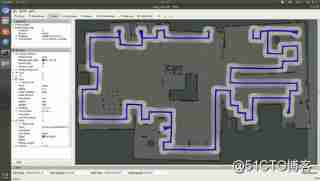
For more cool applications based on maps, please refer to the following :

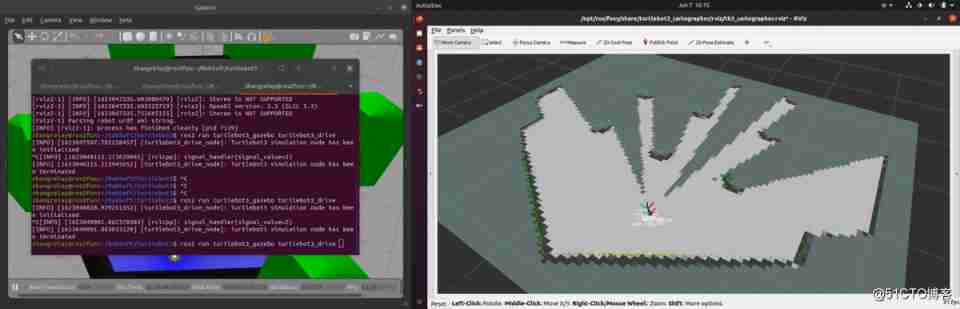
Start the simulation world
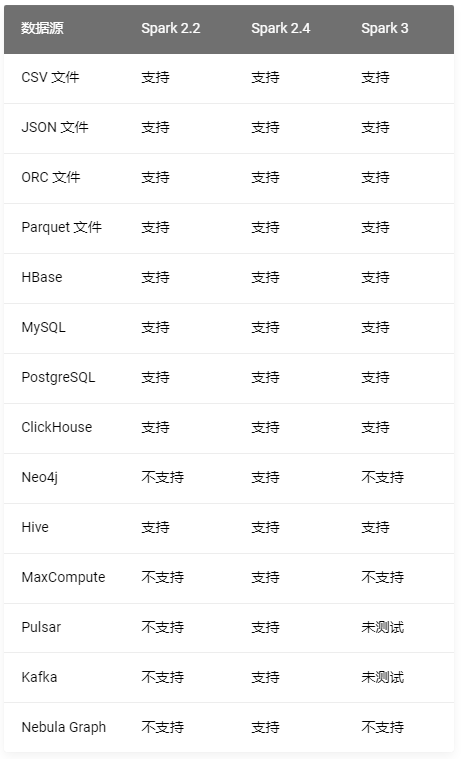
There are three Gazebo Environmental Science , But to use SLAM Create map , It is recommended to use TurtleBot3 World or TurtleBot3 House.
Use one of the following commands to load Gazebo Environmental Science . In this directive , Will use TurtleBot3 World.
Please be there. burger、waffle、waffle_pi In Chinese, it means TURTLEBOT3_MODEL Parameters use the correct keywords .
- world
- $ export TURTLEBOT3_MODEL=burger
$ ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py - house
- $ export TURTLEBOT3_MODEL=burger
$ ros2 launch turtlebot3_gazebo turtlebot3_house.launch.py
Choose one of the two above .
function SLAM node
Use Ctrl + Alt + T From remote PC Open a new terminal and run SLAM node . By default Cartographer SLAM Method .
- $ export TURTLEBOT3_MODEL=burger
$ ros2 launch turtlebot3_cartographer cartographer.launch.py use_sim_time:=True
Run the autonomous obstacle avoidance node
Use Ctrl + Alt + T From remote PC Open a new terminal , And then from PC function drive node .
- ros2 run turtlebot3_gazebo turtlebot3_drive
Run the remote control operation node
Use Ctrl + Alt + T From remote PC Open a new terminal , And then from the remote PC Run the remote operation node .
- ros2 run turtlebot3_teleop teleop_keyboard
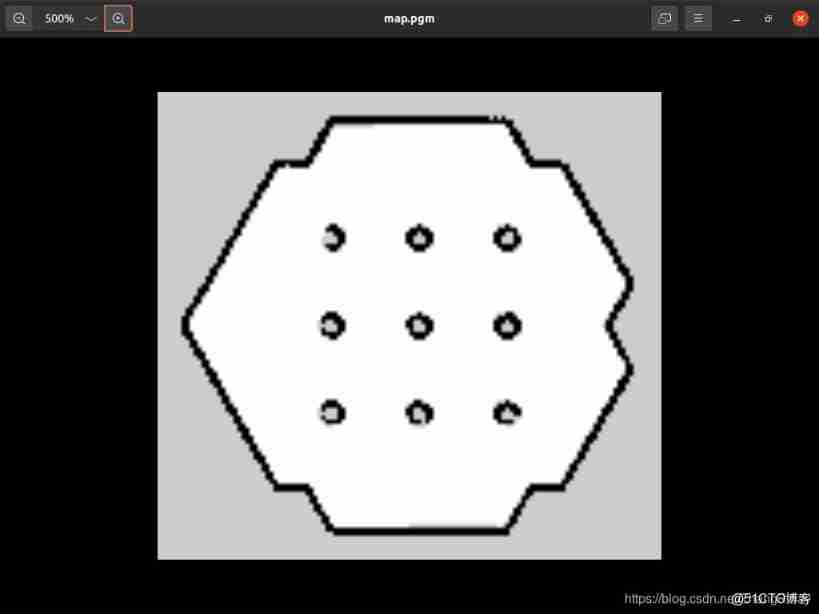
Save the map
After successfully creating the map , Use Ctrl + Alt + T From remote PC Open a new terminal and save the map .
- ros2 run nav2_map_server map_saver_cli -f ~/map

cartographer.launch
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch_ros.actions import Node
from launch.substitutions import LaunchConfiguration
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import ThisLaunchFileDir
def generate_launch_description():
use_sim_time = LaunchConfiguration('use_sim_time', default='false')
turtlebot3_cartographer_prefix = get_package_share_directory('turtlebot3_cartographer')
cartographer_config_dir = LaunchConfiguration('cartographer_config_dir', default=os.path.join(
turtlebot3_cartographer_prefix, 'config'))
configuration_basename = LaunchConfiguration('configuration_basename',
default='turtlebot3_lds_2d.lua')
resolution = LaunchConfiguration('resolution', default='0.05')
publish_period_sec = LaunchConfiguration('publish_period_sec', default='1.0')
rviz_config_dir = os.path.join(get_package_share_directory('turtlebot3_cartographer'),
'rviz', 'tb3_cartographer.rviz')
return LaunchDescription([
DeclareLaunchArgument(
'cartographer_config_dir',
default_value=cartographer_config_dir,
description='Full path to config file to load'),
DeclareLaunchArgument(
'configuration_basename',
default_value=configuration_basename,
description='Name of lua file for cartographer'),
DeclareLaunchArgument(
'use_sim_time',
default_value='false',
description='Use simulation (Gazebo) clock if true'),
Node(
package='cartographer_ros',
executable='cartographer_node',
name='cartographer_node',
output='screen',
parameters=[{'use_sim_time': use_sim_time}],
arguments=['-configuration_directory', cartographer_config_dir,
'-configuration_basename', configuration_basename]),
DeclareLaunchArgument(
'resolution',
default_value=resolution,
description='Resolution of a grid cell in the published occupancy grid'),
DeclareLaunchArgument(
'publish_period_sec',
default_value=publish_period_sec,
description='OccupancyGrid publishing period'),
IncludeLaunchDescription(
PythonLaunchDescriptionSource([ThisLaunchFileDir(), '/occupancy_grid.launch.py']),
launch_arguments={'use_sim_time': use_sim_time, 'resolution': resolution,
'publish_period_sec': publish_period_sec}.items(),
),
Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_config_dir],
parameters=[{'use_sim_time': use_sim_time}],
output='screen'),
])
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
- 34.
- 35.
- 36.
- 37.
- 38.
- 39.
- 40.
- 41.
- 42.
- 43.
- 44.
- 45.
- 46.
- 47.
- 48.
- 49.
- 50.
- 51.
- 52.
- 53.
- 54.
- 55.
- 56.
- 57.
- 58.
- 59.
- 60.
- 61.
- 62.
- 63.
- 64.
- 65.
- 66.
- 67.
- 68.
- 69.
- 70.
- 71.
- 72.
The configuration file lua
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "imu_link",
published_frame = "odom",
odom_frame = "odom",
provide_odom_frame = false,
publish_frame_projected_to_2d = true,
use_odometry = true,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 1,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 0,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.min_range = 0.12
TRAJECTORY_BUILDER_2D.max_range = 3.5
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 3.
TRAJECTORY_BUILDER_2D.use_imu_data = false
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.motion_filter.max_angle_radians = math.rad(0.1)
POSE_GRAPH.constraint_builder.min_score = 0.65
POSE_GRAPH.constraint_builder.global_localization_min_score = 0.7
-- POSE_GRAPH.optimize_every_n_nodes = 0
return options
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
- 34.
- 35.
- 36.
- 37.
- 38.
- 39.
- 40.
- 41.
- 42.
- 43.
- 44.
- 45.
边栏推荐
- Postman automatically fills headers
- Nebula importer data import practice
- Main window in QT application
- Package What is the function of JSON file? What do the inside ^ angle brackets and ~ tilde mean?
- 微信小程序:全新独立后台月老办事处一元交友盲盒
- [swagger]-swagger learning
- Wechat applet; Gibberish generator
- Global and Chinese market of veterinary thermometers 2022-2028: Research Report on technology, participants, trends, market size and share
- Armv8-a programming guide MMU (3)
- Playwright recording
猜你喜欢

Wechat applet: wechat applet source code download new community system optimized version support agent member system function super high income
Nebula importer data import practice
Redis(1)之Redis简介

Basic operation of database and table ----- phased test II
![[development of large e-commerce projects] performance pressure test - Optimization - impact of middleware on performance -40](/img/e4/0bdee782a65028b2bc87db85d48738.png)
[development of large e-commerce projects] performance pressure test - Optimization - impact of middleware on performance -40
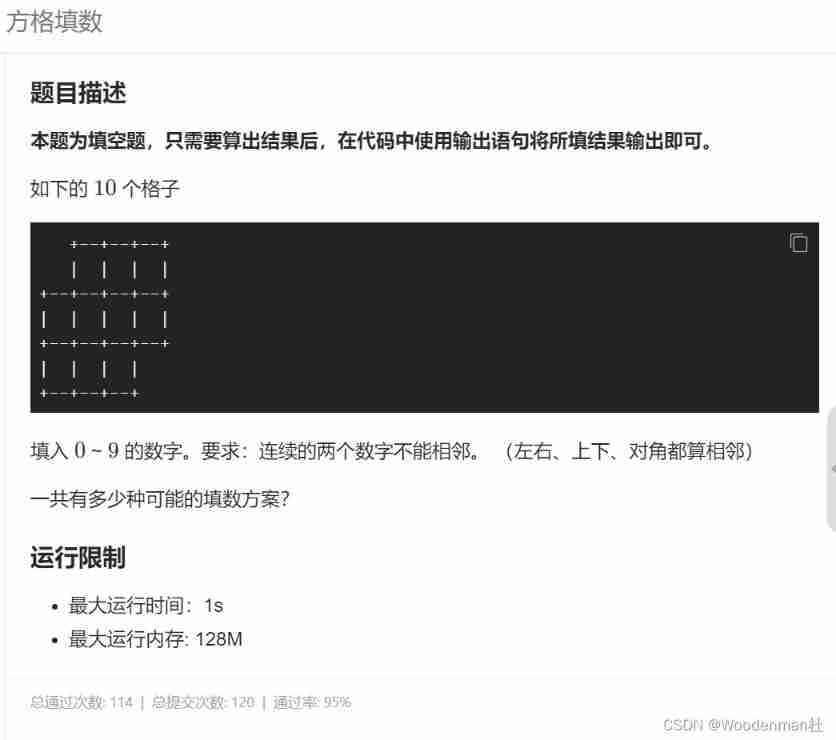
Blue Bridge Cup Square filling (DFS backtracking)
Single step debugging of master data reading of SAP commerce cloud products

Game 280 of leetcode week
Remote control service

How to use words to describe breaking change in Spartacus UI of SAP e-commerce cloud
随机推荐
Phpstrom setting function annotation description
JS implementation determines whether the point is within the polygon range
【海浪建模2】三维海浪建模以及海浪发电机建模matlab仿真
Global and Chinese markets for industrial X-ray testing equipment 2022-2028: Research Report on technology, participants, trends, market size and share
Exploration and practice of integration of streaming and wholesale in jd.com
Database postragesq BSD authentication
Classification of performance tests (learning summary)
Global and Chinese market of veterinary thermometers 2022-2028: Research Report on technology, participants, trends, market size and share
La jeunesse sans rancune de Xi Murong
【纯音听力测试】基于MATLAB的纯音听力测试系统
资深测试/开发程序员写下无bug?资历(枷锁)不要惧怕错误......
Wechat applet: independent background with distribution function, Yuelao office blind box for making friends
Global and Chinese market of optical densitometers 2022-2028: Research Report on technology, participants, trends, market size and share
RB technology stack
Yyds dry goods inventory kubernetes management business configuration methods? (08)
Introduction to the gtid mode of MySQL master-slave replication
The perfect car for successful people: BMW X7! Superior performance, excellent comfort and safety
Exploration and Practice of Stream Batch Integration in JD
The performance of major mainstream programming languages is PK, and the results are unexpected
Discrete mathematics: propositional symbolization of predicate logic