当前位置:网站首页>OpenGL - Model Loading
OpenGL - Model Loading
2022-07-05 09:12:00 【农场主er】
一个非常流行的模型导入库是Assimp,它是Open Asset Import Library的缩写。Assimp能够导入很多种不同的模型文件格式(并也能够导出部分的格式),它会将所有的模型数据加载至Assimp的通用数据结构中。当Assimp加载完模型之后,我们就能够从Assimp的数据结构中提取我们所需的所有数据了。由于Assimp的数据结构保持不变,不论导入的是什么种类的文件格式,它都能够将我们从这些不同的文件格式中抽象出来,用同一种方式访问我们需要的数据。
当使用Assimp导入一个模型的时候,它通常会将整个模型加载进一个场景(Scene)对象,它会包含导入的模型/场景中的所有数据。Assimp会将场景载入为一系列的节点(Node),每个节点包含了场景对象中所储存数据的索引,每个节点都可以有任意数量的子节点。Assimp数据结构的(简化)模型如下: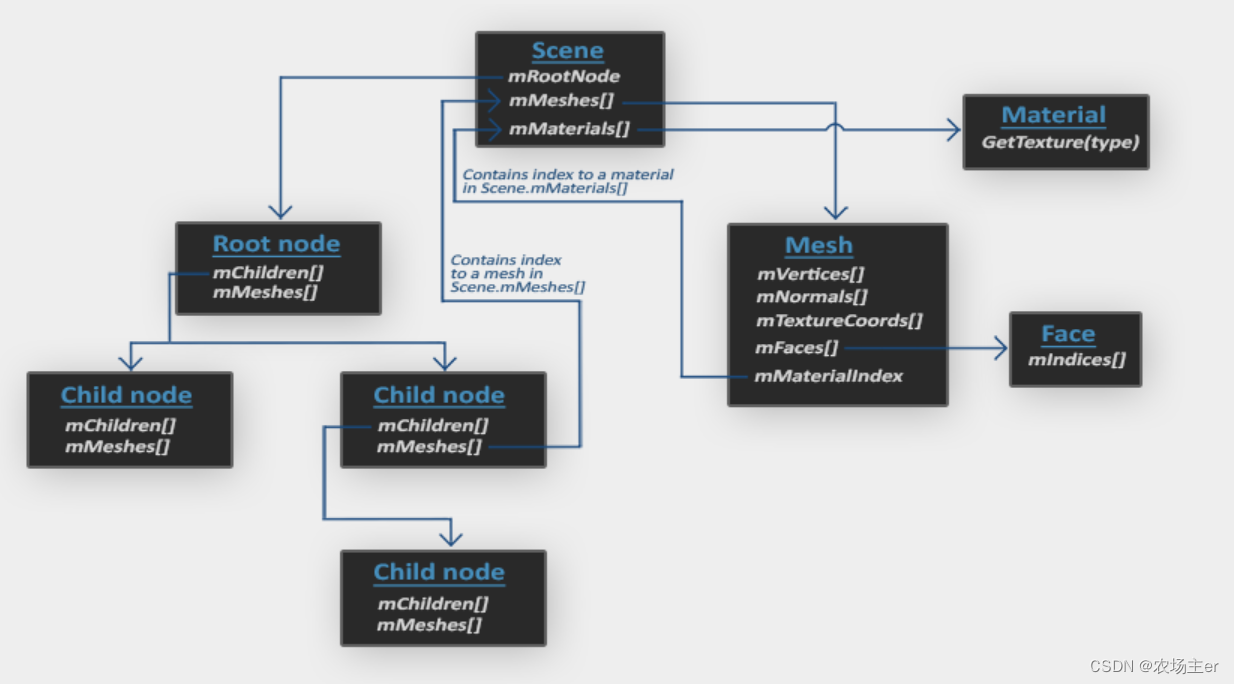
- 和材质和
网格(Mesh)一样,所有的场景/模型数据都包含在Scene对象中。Scene对象也包含了场景根节点的引用。 - 场景的
Root node(根节点)可能包含子节点(和其它的节点一样),它会有一系列指向场景对象中mMeshes数组中储存的网格数据的索引。Scene下的mMeshes数组储存了真正的Mesh对象,节点中的mMeshes数组保存的只是场景中网格数组的索引。 - 一个
Mesh对象本身包含了渲染所需要的所有相关数据,像是顶点位置、法向量、纹理坐标、面(Face)和物体的材质。 - 一个网格包含了多个面。
Face代表的是物体的渲染图元(Primitive)(三角形、方形、点)。一个面包含了组成图元的顶点的索引。由于顶点和索引是分开的,使用一个索引缓冲来渲染是非常简单的(见你好,三角形)。 - 最后,一个网格也包含了一个
Material对象,它包含了一些函数能让我们获取物体的材质属性,比如说颜色和纹理贴图(比如漫反射和镜面光贴图)。
首先定义绘制需要的Mesh类:
#ifndef MESH_H
#define MESH_H
#include <glad/glad.h> // holds all OpenGL type declarations
#include <glm/glm.hpp>
#include <glm/gtc/matrix_transform.hpp>
#include <learnopengl/shader.h>
#include <string>
#include <vector>
using namespace std;
#define MAX_BONE_INFLUENCE 4
struct Vertex {
// position
glm::vec3 Position;
// normal
glm::vec3 Normal;
// texCoords
glm::vec2 TexCoords;
// tangent
glm::vec3 Tangent;
// bitangent
glm::vec3 Bitangent;
//bone indexes which will influence this vertex
int m_BoneIDs[MAX_BONE_INFLUENCE];
//weights from each bone
float m_Weights[MAX_BONE_INFLUENCE];
};
struct Texture {
unsigned int id;
string type;
string path;
};
class Mesh {
public:
// mesh Data
vector<Vertex> vertices;
vector<unsigned int> indices;
vector<Texture> textures;
unsigned int VAO;
// constructor
Mesh(vector<Vertex> vertices, vector<unsigned int> indices, vector<Texture> textures)
{
this->vertices = vertices;
this->indices = indices;
this->textures = textures;
// now that we have all the required data, set the vertex buffers and its attribute pointers.
setupMesh();
}
// render the mesh
void Draw(Shader &shader)
{
// bind appropriate textures
unsigned int diffuseNr = 1;
unsigned int specularNr = 1;
unsigned int normalNr = 1;
unsigned int heightNr = 1;
for(unsigned int i = 0; i < textures.size(); i++)
{
glActiveTexture(GL_TEXTURE0 + i); // active proper texture unit before binding
// retrieve texture number (the N in diffuse_textureN)
string number;
string name = textures[i].type;
if(name == "texture_diffuse")
number = std::to_string(diffuseNr++);
else if(name == "texture_specular")
number = std::to_string(specularNr++); // transfer unsigned int to string
else if(name == "texture_normal")
number = std::to_string(normalNr++); // transfer unsigned int to string
else if(name == "texture_height")
number = std::to_string(heightNr++); // transfer unsigned int to string
// now set the sampler to the correct texture unit
glUniform1i(glGetUniformLocation(shader.ID, (name + number).c_str()), i);
// and finally bind the texture
glBindTexture(GL_TEXTURE_2D, textures[i].id);
}
// draw mesh
glBindVertexArray(VAO);
glDrawElements(GL_TRIANGLES, static_cast<unsigned int>(indices.size()), GL_UNSIGNED_INT, 0);
glBindVertexArray(0);
// always good practice to set everything back to defaults once configured.
glActiveTexture(GL_TEXTURE0);
}
private:
// render data
unsigned int VBO, EBO;
// initializes all the buffer objects/arrays
void setupMesh()
{
// create buffers/arrays
glGenVertexArrays(1, &VAO);
glGenBuffers(1, &VBO);
glGenBuffers(1, &EBO);
glBindVertexArray(VAO);
// load data into vertex buffers
glBindBuffer(GL_ARRAY_BUFFER, VBO);
// A great thing about structs is that their memory layout is sequential for all its items.
// The effect is that we can simply pass a pointer to the struct and it translates perfectly to a glm::vec3/2 array which
// again translates to 3/2 floats which translates to a byte array.
glBufferData(GL_ARRAY_BUFFER, vertices.size() * sizeof(Vertex), &vertices[0], GL_STATIC_DRAW);
glBindBuffer(GL_ELEMENT_ARRAY_BUFFER, EBO);
glBufferData(GL_ELEMENT_ARRAY_BUFFER, indices.size() * sizeof(unsigned int), &indices[0], GL_STATIC_DRAW);
// set the vertex attribute pointers
// vertex Positions
glEnableVertexAttribArray(0);
glVertexAttribPointer(0, 3, GL_FLOAT, GL_FALSE, sizeof(Vertex), (void*)0);
// vertex normals
glEnableVertexAttribArray(1);
glVertexAttribPointer(1, 3, GL_FLOAT, GL_FALSE, sizeof(Vertex), (void*)offsetof(Vertex, Normal));
// vertex texture coords
glEnableVertexAttribArray(2);
glVertexAttribPointer(2, 2, GL_FLOAT, GL_FALSE, sizeof(Vertex), (void*)offsetof(Vertex, TexCoords));
// vertex tangent
glEnableVertexAttribArray(3);
glVertexAttribPointer(3, 3, GL_FLOAT, GL_FALSE, sizeof(Vertex), (void*)offsetof(Vertex, Tangent));
// vertex bitangent
glEnableVertexAttribArray(4);
glVertexAttribPointer(4, 3, GL_FLOAT, GL_FALSE, sizeof(Vertex), (void*)offsetof(Vertex, Bitangent));
// ids
glEnableVertexAttribArray(5);
glVertexAttribIPointer(5, 4, GL_INT, sizeof(Vertex), (void*)offsetof(Vertex, m_BoneIDs));
// weights
glEnableVertexAttribArray(6);
glVertexAttribPointer(6, 4, GL_FLOAT, GL_FALSE, sizeof(Vertex), (void*)offsetof(Vertex, m_Weights));
glBindVertexArray(0);
}
};
#endif
然后定义导入模型的Model类:
#ifndef MODEL_H
#define MODEL_H
#include <glad/glad.h>
#include <glm/glm.hpp>
#include <glm/gtc/matrix_transform.hpp>
#include <stb_image.h>
#include <assimp/Importer.hpp>
#include <assimp/scene.h>
#include <assimp/postprocess.h>
#include <learnopengl/mesh.h>
#include <learnopengl/shader.h>
#include <string>
#include <fstream>
#include <sstream>
#include <iostream>
#include <map>
#include <vector>
using namespace std;
unsigned int TextureFromFile(const char *path, const string &directory, bool gamma = false);
class Model
{
public:
// model data
vector<Texture> textures_loaded; // stores all the textures loaded so far, optimization to make sure textures aren't loaded more than once.
vector<Mesh> meshes;
string directory;
bool gammaCorrection;
// constructor, expects a filepath to a 3D model.
Model(string const &path, bool gamma = false) : gammaCorrection(gamma)
{
loadModel(path);
}
// draws the model, and thus all its meshes
void Draw(Shader &shader)
{
for(unsigned int i = 0; i < meshes.size(); i++)
meshes[i].Draw(shader);
}
private:
// loads a model with supported ASSIMP extensions from file and stores the resulting meshes in the meshes vector.
void loadModel(string const &path)
{
// read file via ASSIMP
Assimp::Importer importer;
const aiScene* scene = importer.ReadFile(path, aiProcess_Triangulate | aiProcess_GenSmoothNormals | aiProcess_FlipUVs | aiProcess_CalcTangentSpace);
// check for errors
if(!scene || scene->mFlags & AI_SCENE_FLAGS_INCOMPLETE || !scene->mRootNode) // if is Not Zero
{
cout << "ERROR::ASSIMP:: " << importer.GetErrorString() << endl;
return;
}
// retrieve the directory path of the filepath
directory = path.substr(0, path.find_last_of('/'));
// process ASSIMP's root node recursively
processNode(scene->mRootNode, scene);
}
// processes a node in a recursive fashion. Processes each individual mesh located at the node and repeats this process on its children nodes (if any).
void processNode(aiNode *node, const aiScene *scene)
{
// process each mesh located at the current node
for(unsigned int i = 0; i < node->mNumMeshes; i++)
{
// the node object only contains indices to index the actual objects in the scene.
// the scene contains all the data, node is just to keep stuff organized (like relations between nodes).
aiMesh* mesh = scene->mMeshes[node->mMeshes[i]];
meshes.push_back(processMesh(mesh, scene));
}
// after we've processed all of the meshes (if any) we then recursively process each of the children nodes
for(unsigned int i = 0; i < node->mNumChildren; i++)
{
processNode(node->mChildren[i], scene);
}
}
Mesh processMesh(aiMesh *mesh, const aiScene *scene)
{
// data to fill
vector<Vertex> vertices;
vector<unsigned int> indices;
vector<Texture> textures;
// walk through each of the mesh's vertices
for(unsigned int i = 0; i < mesh->mNumVertices; i++)
{
Vertex vertex;
glm::vec3 vector; // we declare a placeholder vector since assimp uses its own vector class that doesn't directly convert to glm's vec3 class so we transfer the data to this placeholder glm::vec3 first.
// positions
vector.x = mesh->mVertices[i].x;
vector.y = mesh->mVertices[i].y;
vector.z = mesh->mVertices[i].z;
vertex.Position = vector;
// normals
if (mesh->HasNormals())
{
vector.x = mesh->mNormals[i].x;
vector.y = mesh->mNormals[i].y;
vector.z = mesh->mNormals[i].z;
vertex.Normal = vector;
}
// texture coordinates
if(mesh->mTextureCoords[0]) // does the mesh contain texture coordinates?
{
glm::vec2 vec;
// a vertex can contain up to 8 different texture coordinates. We thus make the assumption that we won't
// use models where a vertex can have multiple texture coordinates so we always take the first set (0).
vec.x = mesh->mTextureCoords[0][i].x;
vec.y = mesh->mTextureCoords[0][i].y;
vertex.TexCoords = vec;
// tangent
vector.x = mesh->mTangents[i].x;
vector.y = mesh->mTangents[i].y;
vector.z = mesh->mTangents[i].z;
vertex.Tangent = vector;
// bitangent
vector.x = mesh->mBitangents[i].x;
vector.y = mesh->mBitangents[i].y;
vector.z = mesh->mBitangents[i].z;
vertex.Bitangent = vector;
}
else
vertex.TexCoords = glm::vec2(0.0f, 0.0f);
vertices.push_back(vertex);
}
// now wak through each of the mesh's faces (a face is a mesh its triangle) and retrieve the corresponding vertex indices.
for(unsigned int i = 0; i < mesh->mNumFaces; i++)
{
aiFace face = mesh->mFaces[i];
// retrieve all indices of the face and store them in the indices vector
for(unsigned int j = 0; j < face.mNumIndices; j++)
indices.push_back(face.mIndices[j]);
}
// process materials
aiMaterial* material = scene->mMaterials[mesh->mMaterialIndex];
// we assume a convention for sampler names in the shaders. Each diffuse texture should be named
// as 'texture_diffuseN' where N is a sequential number ranging from 1 to MAX_SAMPLER_NUMBER.
// Same applies to other texture as the following list summarizes:
// diffuse: texture_diffuseN
// specular: texture_specularN
// normal: texture_normalN
// 1. diffuse maps
vector<Texture> diffuseMaps = loadMaterialTextures(material, aiTextureType_DIFFUSE, "texture_diffuse");
textures.insert(textures.end(), diffuseMaps.begin(), diffuseMaps.end());
// 2. specular maps
vector<Texture> specularMaps = loadMaterialTextures(material, aiTextureType_SPECULAR, "texture_specular");
textures.insert(textures.end(), specularMaps.begin(), specularMaps.end());
// 3. normal maps
std::vector<Texture> normalMaps = loadMaterialTextures(material, aiTextureType_HEIGHT, "texture_normal");
textures.insert(textures.end(), normalMaps.begin(), normalMaps.end());
// 4. height maps
std::vector<Texture> heightMaps = loadMaterialTextures(material, aiTextureType_AMBIENT, "texture_height");
textures.insert(textures.end(), heightMaps.begin(), heightMaps.end());
// return a mesh object created from the extracted mesh data
return Mesh(vertices, indices, textures);
}
// checks all material textures of a given type and loads the textures if they're not loaded yet.
// the required info is returned as a Texture struct.
vector<Texture> loadMaterialTextures(aiMaterial *mat, aiTextureType type, string typeName)
{
vector<Texture> textures;
for(unsigned int i = 0; i < mat->GetTextureCount(type); i++)
{
aiString str;
mat->GetTexture(type, i, &str);
// check if texture was loaded before and if so, continue to next iteration: skip loading a new texture
bool skip = false;
for(unsigned int j = 0; j < textures_loaded.size(); j++)
{
if(std::strcmp(textures_loaded[j].path.data(), str.C_Str()) == 0)
{
textures.push_back(textures_loaded[j]);
skip = true; // a texture with the same filepath has already been loaded, continue to next one. (optimization)
break;
}
}
if(!skip)
{
// if texture hasn't been loaded already, load it
Texture texture;
texture.id = TextureFromFile(str.C_Str(), this->directory);
texture.type = typeName;
texture.path = str.C_Str();
textures.push_back(texture);
textures_loaded.push_back(texture); // store it as texture loaded for entire model, to ensure we won't unnecesery load duplicate textures.
}
}
return textures;
}
};
unsigned int TextureFromFile(const char *path, const string &directory, bool gamma)
{
string filename = string(path);
filename = directory + '/' + filename;
unsigned int textureID;
glGenTextures(1, &textureID);
int width, height, nrComponents;
unsigned char *data = stbi_load(filename.c_str(), &width, &height, &nrComponents, 0);
if (data)
{
GLenum format;
if (nrComponents == 1)
format = GL_RED;
else if (nrComponents == 3)
format = GL_RGB;
else if (nrComponents == 4)
format = GL_RGBA;
glBindTexture(GL_TEXTURE_2D, textureID);
glTexImage2D(GL_TEXTURE_2D, 0, format, width, height, 0, format, GL_UNSIGNED_BYTE, data);
glGenerateMipmap(GL_TEXTURE_2D);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_S, GL_REPEAT);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_T, GL_REPEAT);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_LINEAR_MIPMAP_LINEAR);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_LINEAR);
stbi_image_free(data);
}
else
{
std::cout << "Texture failed to load at path: " << path << std::endl;
stbi_image_free(data);
}
return textureID;
}
#endif
边栏推荐
- kubeadm系列-01-preflight究竟有多少check
- Explain NN in pytorch in simple terms CrossEntropyLoss
- How many checks does kubedm series-01-preflight have
- uni-app 实现全局变量
- Jenkins pipeline method (function) definition and call
- Applet global style configuration window
- Multiple solutions to one problem, asp Net core application startup initialization n schemes [Part 1]
- RT thread kernel quick start, kernel implementation and application development learning with notes
- np.allclose
- 嗨 FUN 一夏,与 StarRocks 一起玩转 SQL Planner!
猜你喜欢
Introduction Guide to stereo vision (7): stereo matching
Huber Loss
Beautiful soup parsing and extracting data

Solutions of ordinary differential equations (2) examples
![[daiy4] copy of JZ35 complex linked list](/img/bc/ce90bb3cb6f52605255f1d6d6894b0.png)
[daiy4] copy of JZ35 complex linked list
Use and programming method of ros-8 parameters
Huber Loss
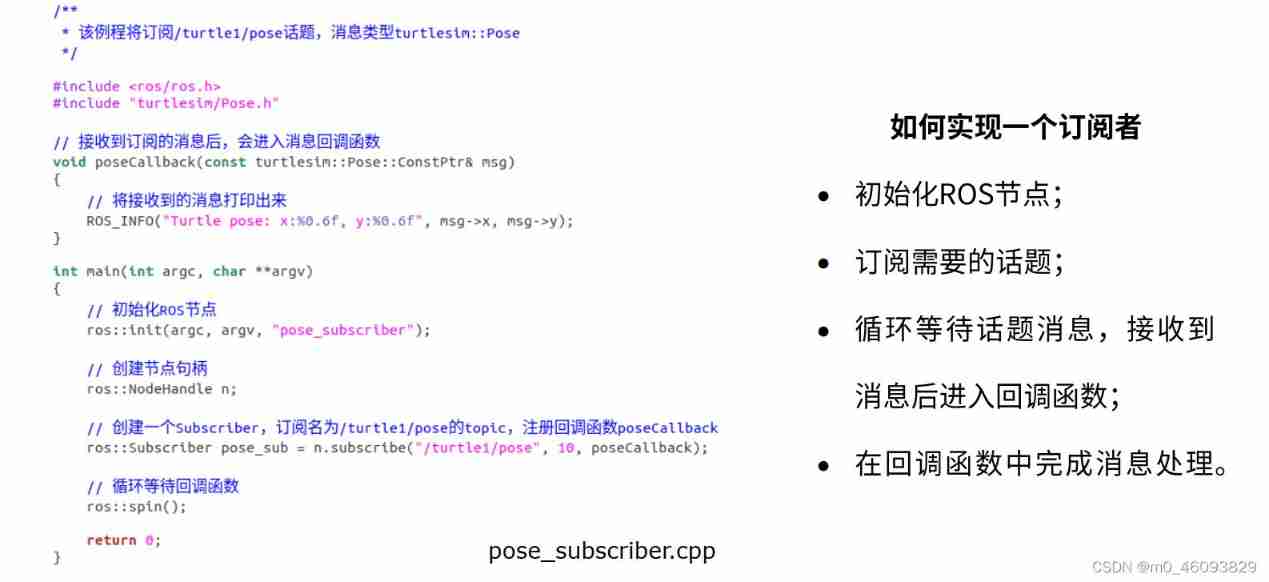
Programming implementation of subscriber node of ROS learning 3 subscriber
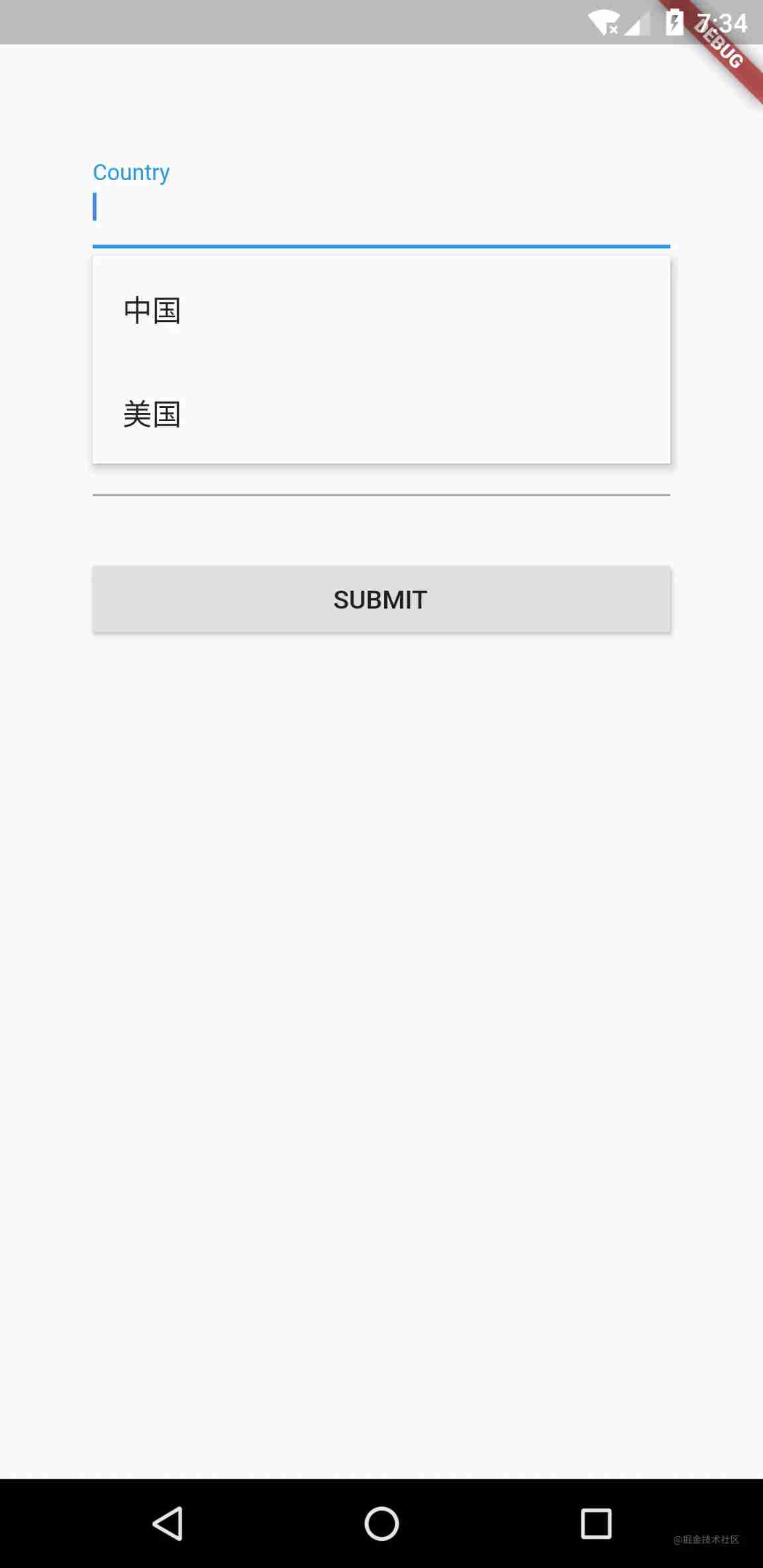
Shutter uses overlay to realize global pop-up
Composition of applet code
随机推荐
Beautiful soup parsing and extracting data
C # draw Bezier curve with control points for lattice images and vector graphics
kubeadm系列-02-kubelet的配置和启动
L'information et l'entropie, tout ce que vous voulez savoir est ici.
混淆矩阵(Confusion Matrix)
我的一生.
Multiple solutions to one problem, asp Net core application startup initialization n schemes [Part 1]
Ministry of transport and Ministry of Education: widely carry out water traffic safety publicity and drowning prevention safety reminders
ROS learning 4 custom message
Golang foundation - the time data inserted by golang into MySQL is inconsistent with the local time
容易混淆的基本概念 成员变量 局部变量 全局变量
2309. The best English letters with both upper and lower case
kubeadm系列-01-preflight究竟有多少check
Hosting environment API
Codeforces round 684 (Div. 2) e - green shopping (line segment tree)
C [essential skills] use of configurationmanager class (use of file app.config)
太不好用了,长文章加图文,今后只写小短文
C#绘制带控制点的Bezier曲线,用于点阵图像及矢量图形
Golang foundation -- map, array and slice store different types of data
Ros-10 roslaunch summary