当前位置:网站首页>#yyds干货盘点# 解决名企真题:最大差值
#yyds干货盘点# 解决名企真题:最大差值
2022-07-06 18:36:00 【51CTO】
1.简述:
有一个长为 n 的数组 A ,求满足 0 ≤ a ≤ b < n 的 A[b] - A[a] 的最大值。
给定数组 A 及它的大小 n ,请返回最大差值。
数据范围: %22%20aria-hidden%3D%22true%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-32%22%20x%3D%220%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-3C%22%20x%3D%22778%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-6E%22%20x%3D%221834%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-2264%22%20x%3D%222712%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-32%22%20x%3D%223769%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-2217%22%20x%3D%224491%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%3Cg%20transform%3D%22translate(5214%2C0)%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-31%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-30%22%20x%3D%22500%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20transform%3D%22scale(0.707)%22%20xlink%3Ahref%3D%22%23E1-MJMAIN-35%22%20x%3D%221415%22%20y%3D%22583%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fsvg%3E) ,数组中的值满足
,数组中的值满足 %22%20aria-hidden%3D%22true%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-30%22%20x%3D%220%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-2264%22%20x%3D%22778%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-7C%22%20x%3D%221834%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-76%22%20x%3D%222113%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-61%22%20x%3D%222598%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-6C%22%20x%3D%223128%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-7C%22%20x%3D%223426%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-2264%22%20x%3D%223982%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-35%22%20x%3D%225039%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-2217%22%20x%3D%225761%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%3Cg%20transform%3D%22translate(6484%2C0)%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-31%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-30%22%20x%3D%22500%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20transform%3D%22scale(0.707)%22%20xlink%3Ahref%3D%22%23E1-MJMAIN-38%22%20x%3D%221415%22%20y%3D%22583%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fg%3E%0A%3C%2Fsvg%3E)
输入:
返回值:
输入:
返回值:
2.代码实现:
边栏推荐
猜你喜欢
Analyze "C language" [advanced] paid knowledge [End]
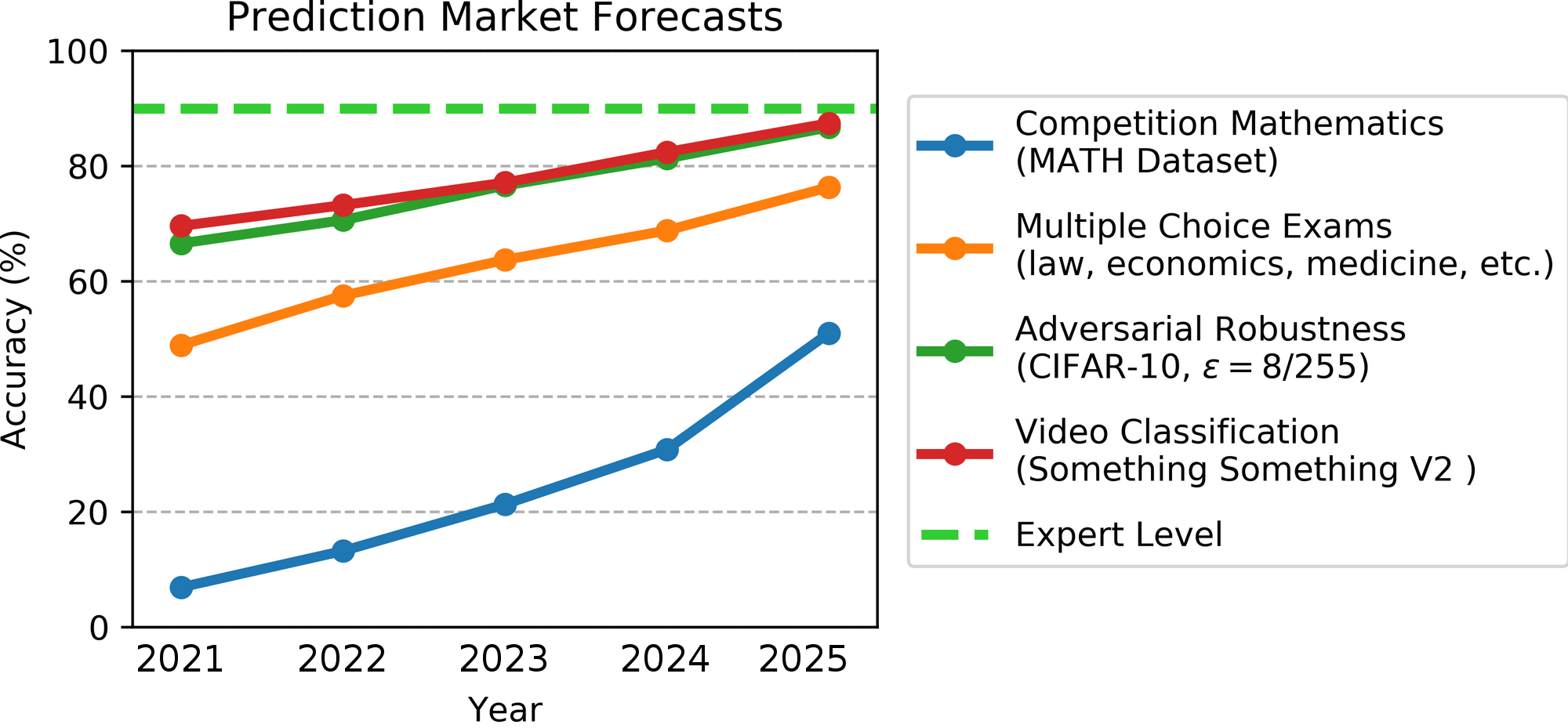
UC伯克利助理教授Jacob Steinhardt预测AI基准性能:AI在数学等领域的进展比预想要快,但鲁棒性基准性能进展较慢
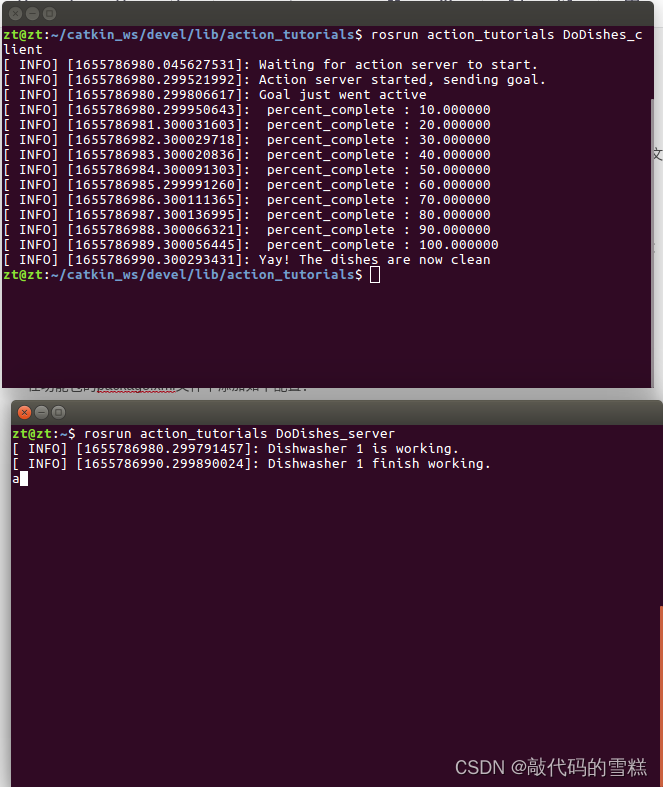
Ros Learning (23) Action Communication Mechanism

Zhang Ping'an: accelerate cloud digital innovation and jointly build an industrial smart ecosystem
Cat recycling bin
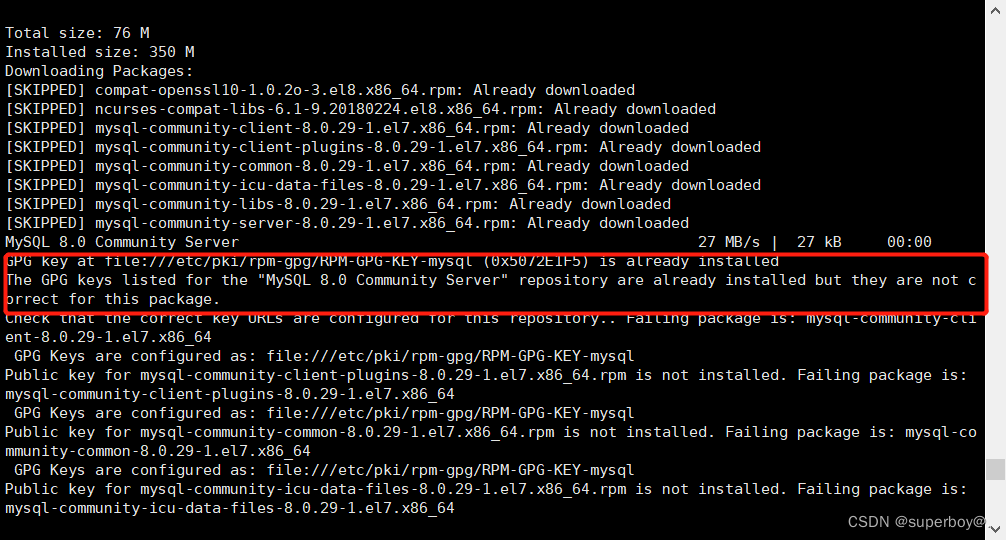
centos8安装mysql报错:The GPG keys listed for the “MySQL 8.0 Community Server“ repository are already ins
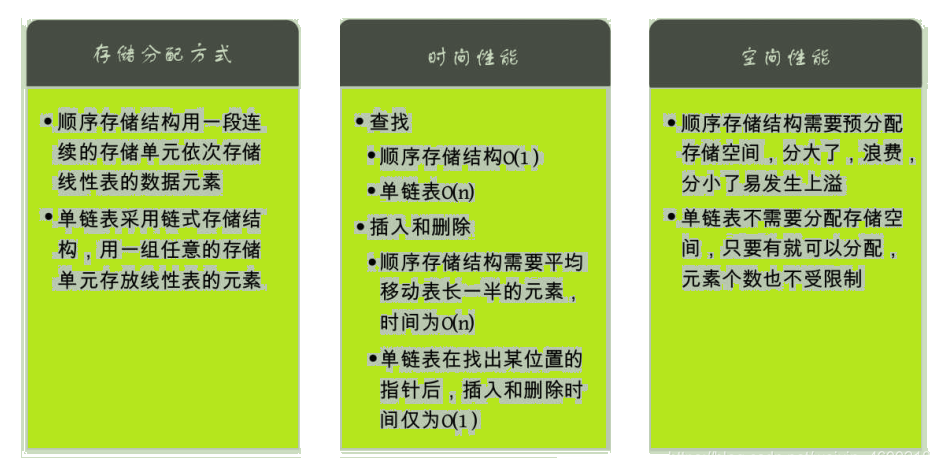
【唯一】的“万字配图“ | 讲透【链式存储结构】是什么?
Processing image files uploaded by streamlit Library
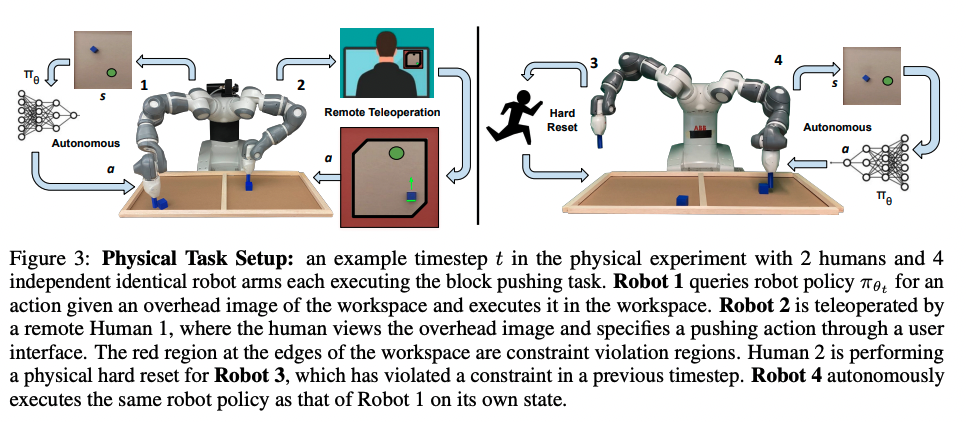
Robot team learning method to achieve 8.8 times human return
FLIR blackfly s usb3 industrial camera: white balance setting method
随机推荐
Add PDF Title floating window
Flir Blackfly S USB3 工业相机:白平衡设置方法
ROS learning (XIX) robot slam function package cartographer
ROS learning (23) action communication mechanism
Blue Bridge Cup 2022 13th provincial competition real topic - block painting
PartyDAO如何在1年内把一篇推文变成了2亿美金的产品DAO
云原生混部最后一道防线:节点水位线设计
Centos8 install MySQL 8.0 using yum x
Jacob Steinhardt, assistant professor of UC Berkeley, predicts AI benchmark performance: AI has made faster progress in fields such as mathematics than expected, but the progress of robustness benchma
Zhang Ping'an: accelerate cloud digital innovation and jointly build an industrial smart ecosystem
Collection recommandée!! Quel plug - in de gestion d'état flutter est le plus fort? Regardez le classement des manons de l'île, s'il vous plaît!
Schedulx v1.4.0 and SaaS versions are released, and you can experience the advanced functions of cost reduction and efficiency increase for free!
C language [23] classic interview questions [Part 2]
freeswitch拨打分机号源代码跟踪
1500万员工轻松管理,云原生数据库GaussDB让HR办公更高效
Flir Blackfly S 工业相机:自动曝光配置及代码
3D激光SLAM:Livox激光雷达硬件时间同步
激光雷达:Ouster OS产品介绍及使用方法
String or binary data will be truncated
JS how to quickly create an array with length n