当前位置:网站首页>Quick completion guide for manipulator (IX): forward kinematics analysis
Quick completion guide for manipulator (IX): forward kinematics analysis
2022-07-05 15:44:00 【Lie on me】
Directory :
Quick completion guide of mechanical arm ( zero ): Main contents and analysis methods of the guide
Quick completion guide of mechanical arm ( One ): The development of manipulator
Quick completion guide of mechanical arm ( Two ): Application of mechanical arm
Quick completion guide of mechanical arm ( 3、 ... and ): Mechanical structure of mechanical arm
Quick completion guide of mechanical arm ( Four ): Reducer of key components of mechanical arm
Quick completion guide of mechanical arm ( 5、 ... and ): End actuators
Quick completion guide of mechanical arm ( 6、 ... and ): Stepper motor driver
Quick completion guide of mechanical arm ( 7、 ... and ): Description method of robot arm posture
Quick completion guide of mechanical arm ( 8、 ... and ): Kinematic modeling ( standard DH Law )
Quick completion guide of mechanical arm ( Nine ): Forward kinematics analysis
In chapter eight , We have got the of the manipulator used DH Parameters , As shown in the following table :
| Connecting rod number | Range of joint variables | ||||
| 1 | 64.2 | -90 | 169.77 | θ1 | (-170,+170) |
| 2 | 305 | 0 | 0 | θ2 | (-132,0) |
| 3 | 0 | 90 | 0 | θ3 | (1,141) |
| 4 | 0 | -90 | -222.63 | θ4 | (-165,+ 165) |
| 5 | 0 | 90 | 0 | θ5 | (-105,+105) |
| 6 | 0 | 0 | -36.25 | θ6 | (-155,+155) |
In determining the DH Parameters after , Use Homogeneous transformation matrix Describe the rotation between coordinate systems 、 Translation relationship , The forward kinematics equation of the manipulator is constructed by using the homogeneous transformation matrix , Based on this, the forward kinematics analysis of the six degree of freedom manipulator is carried out .
One 、 Construct the forward kinematics equation of the manipulator
From the coordinate system i To the coordinate system i-1 Homogeneous transformation matrix ![]() Is a joint variable only
Is a joint variable only ![]() Related functions , This article is written as
Related functions , This article is written as ![]() . The derivation is listed below
. The derivation is listed below ![]() The process of , In a coordinate system i And coordinate system i-1 For example , Coordinate transformation rotation of coordinate system 、 The translation process is shown in the following figure .
The process of , In a coordinate system i And coordinate system i-1 For example , Coordinate transformation rotation of coordinate system 、 The translation process is shown in the following figure .
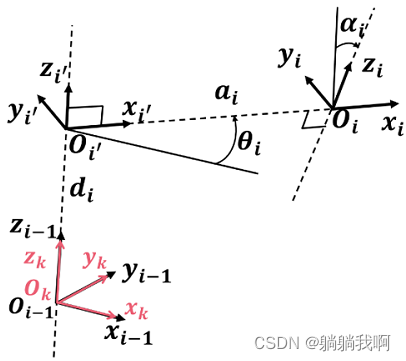
First , Set a coordinate system k And coordinate system i-1 Align , Then set the coordinate system k Along axis zi-1![]() translation di
translation di![]() And around the axis zi-1
And around the axis zi-1![]() rotate θi
rotate θi![]() . Now the coordinate system k Has been linked to the coordinate system
. Now the coordinate system k Has been linked to the coordinate system ![]() Align , The process can be described as
Align , The process can be described as
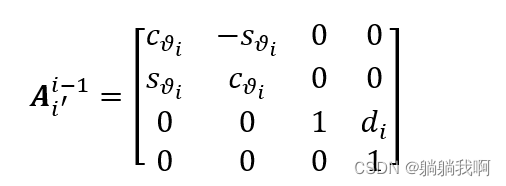
In style ![]() Express cos(n) ,
Express cos(n) ,![]() Express sin(n), It is necessary to consider the x Initial included angle between shafts θ.
Express sin(n), It is necessary to consider the x Initial included angle between shafts θ.
next , Set coordinate system k Along axis xi'![]() translation
translation ![]() And rotate around it
And rotate around it ![]() , This makes the coordinate system and Coordinate system i Align , The process can be described as
, This makes the coordinate system and Coordinate system i Align , The process can be described as
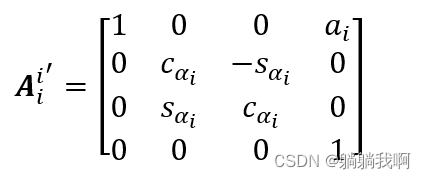
From the coordinate system i To the coordinate system i-1 The homogeneous transformation matrix of can be multiplied by a single transformation matrix ![]() And
And ![]() obtain , by
obtain , by

According to the above formula, a homogeneous transformation matrix representing the relative position and direction between coordinate systems can be obtained , Regard it as the homogeneous transformation matrix of each joint , The results are shown in the table below .
| Joint number | Homogeneous transformation matrix |
| 1 |  |
| 2 | 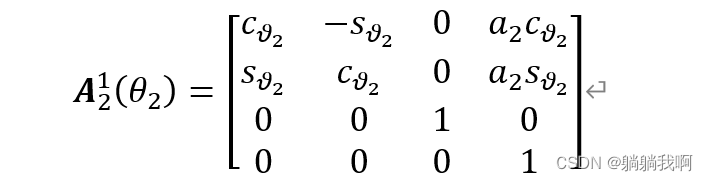 |
| 3 | 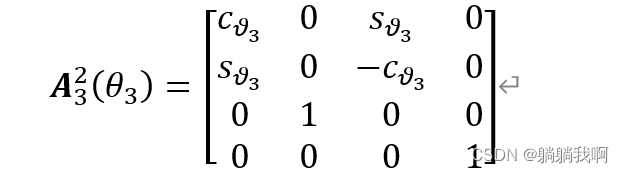 |
| 4 | 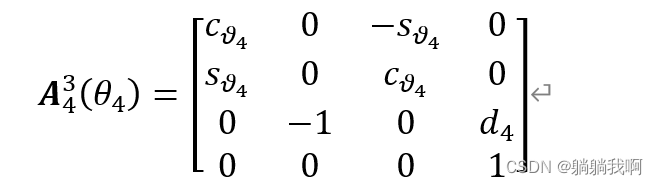 |
| 5 | 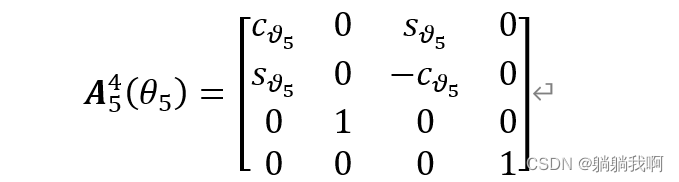 |
| 6 | 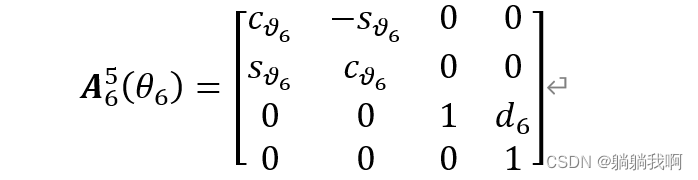 |
Because of the coordinate system 0 Coincide with the base coordinate system , And because of the coordinate system 6 That is to say Tool coordinate system , So there is
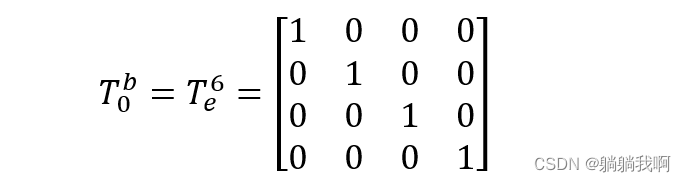
The forward kinematics equation used to represent the tool coordinate system relative to the base coordinate system can be obtained from the above table 6 A homogeneous transformation matrix is right multiplied to obtain , by
![]()
The first three joints make up Anthropomorphic arm , Then its forward kinematics equation is expressed as
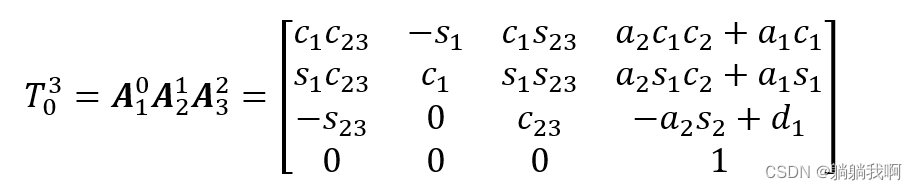
among ,![]() And
And ![]() respectively sin(qj+…+qk) and cos(qj+…+qk) .
respectively sin(qj+…+qk) and cos(qj+…+qk) .
The latter three joints form Spherical wrist , The same can be , The forward kinematics equation of spherical wrist can be expressed as

Then it can be concluded that the forward kinematics equation of the manipulator is :

among ,![]() Is a vector composed of joint variables , vector q This space is called Joint space .
Is a vector composed of joint variables , vector q This space is called Joint space .
Calculated , The position of the end effector is expressed as

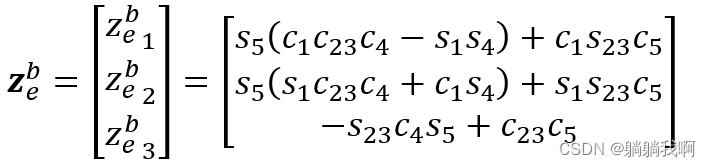
Empathy , The attitude of the end effector can be expressed as


Final , End effector RPY horn It can be expressed as a transcendental function about joint variables , namely
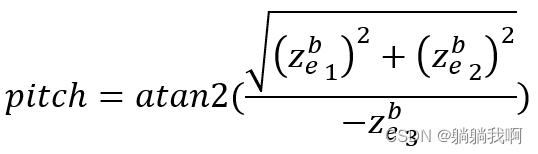
thus , The forward kinematics formula of the manipulator is solved , When we substitute joint variables into the formula, we can get the pose of the end effector .
Two 、 Programming realization of solving forward kinematics equation
Due to the large amount of computation of the forward kinematics equation , In order to improve the operation speed , We choose to use the upper computer to complete the calculation . Use Python Write the solution function of the positive motion equation of the manipulator CalcFwdKin(), Input parameter is 6 Joint variables , The output is the position and attitude of the end effector .
The forward kinematics equation of the manipulator is the transcendental function of the joint variables , There are a lot of trigonometric function calculation and matrix operation in the process of solving , So we introduce Python Self contained math Standard library , This module provides many mathematical operation functions for floating-point numbers .
![]()
In the process of solving the forward kinematics equation math.sin()、math.cos() And math.atan2() Complete the calculation of trigonometric function ; Use math.sqrt() Find the square root ; adopt math.degrees() And math.radians() Complete the conversion between radian and angle .
To use math Function must be imported first :
import math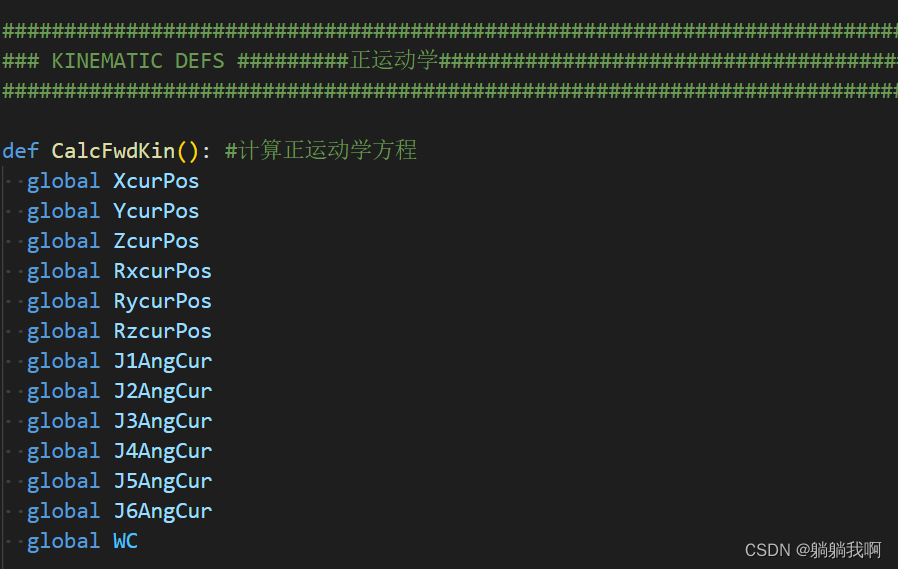
The effect is shown below :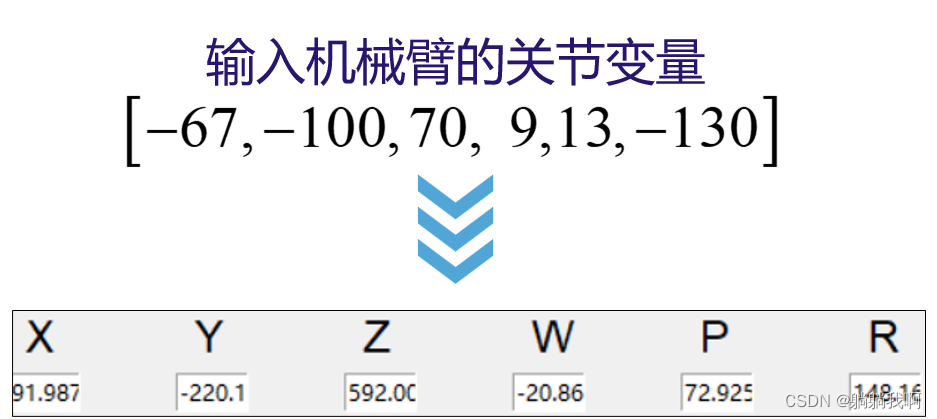
############## DH TABLE ################
############## DH Parameter table ###############
C13 = C4
C14 = C5
C15 = C6
C16 = C7
C17 = C8
C18 = C9
D13 = math.radians(DHr1)
D14 = math.radians(DHr2)
D15 = math.radians(DHr3)
D16 = math.radians(DHr4)
D17 = math.radians(DHr5)
D18 = math.radians(DHr6)
E13 = DHd1
E14 = DHd2
E15 = DHd3
E16 = DHd4
E17 = DHd5
E18 = DHd6
F13 = DHa1
F14 = DHa2
F15 = DHa3
F16 = DHa4
F17 = DHa5
F18 = DHa6
## WORK FRAME INPUT
H13 = float(UFxEntryField.get())
H14 = float(UFyEntryField.get())
H15 = float(UFzEntryField.get())
H16 = float(UFrxEntryField.get())
H17 = float(UFryEntryField.get())
H18 = float(UFrzEntryField.get())
## TOOL FRAME INPUT
J13 = float(TFxEntryField.get())
J14 = float(TFyEntryField.get())
J15 = float(TFzEntryField.get())
J16 = float(TFrxEntryField.get())
J17 = float(TFryEntryField.get())
J18 = float(TFrzEntryField.get())
## WORK FRAME TABLE
B21 = math.cos(math.radians(H18))*math.cos(math.radians(H17))
B22 = math.sin(math.radians(H18))*math.cos(math.radians(H17))
B23 = -math.sin(math.radians(H18))
B24 = 0
C21 = -math.sin(math.radians(H18))*math.cos(math.radians(H16))+math.cos(math.radians(H18))*math.sin(math.radians(H17))*math.sin(math.radians(H16))
C22 = math.cos(math.radians(H18))*math.cos(math.radians(H16))+math.sin(math.radians(H18))*math.sin(math.radians(H17))*math.sin(math.radians(H16))
C23 = math.cos(math.radians(H17))*math.sin(math.radians(H16))
C24 = 0
D21 = math.sin(math.radians(H18))*math.sin(math.radians(H16))+math.cos(math.radians(H18))*math.sin(math.radians(H17))*math.cos(math.radians(H16))
D22 = -math.cos(math.radians(H18))*math.sin(math.radians(H16))+math.sin(math.radians(H18))*math.sin(math.radians(H17))*math.cos(math.radians(H16))
D23 = math.cos(math.radians(H17))*math.cos(math.radians(H16))
D24 = 0
E21 = H13
E22 = H14
E23 = H15
E24 = 1
## J1 FRAME
B27 = math.cos(C13)
B28 = math.sin(C13)
B29 = 0
B30 = 0
C27 = -math.sin(C13)*math.cos(D13)
C28 = math.cos(C13)*math.cos(D13)
C29 = math.sin(D13)
C30 = 0
D27 = math.sin(C13)*math.sin(D13)
D28 = -math.cos(C13)*math.sin(D13)
D29 = math.cos(D13)
D30 = 0
E27 = F13*math.cos(C13)
E28 = F13*math.sin(C13)
E29 = E13
E30 = 1
## J2 FRAME
B33 = math.cos(C14)
B34 = math.sin(C14)
B35 = 0
B36 = 0
C33 = -math.sin(C14)*math.cos(D14)
C34 = math.cos(C14)*math.cos(D14)
C35 = math.sin(D14)
C36 = 0
D33 = math.sin(C14)*math.sin(D14)
D34 = -math.cos(C14)*math.sin(D14)
D35 = math.cos(D14)
D36 = 0
E33 = F14*math.cos(C14)
E34 = F14*math.sin(C14)
E35 = E14
E36 = 1
## J3 FRAME
B39 = math.cos(C15)
B40 = math.sin(C15)
B41 = 0
B42 = 0
C39 = -math.sin(C15)*math.cos(D15)
C40 = math.cos(C15)*math.cos(D15)
C41 = math.sin(D15)
C42 = 0
D39 = math.sin(C15)*math.sin(D15)
D40 = -math.cos(C15)*math.sin(D15)
D41 = math.cos(D15)
D42 = 0
E39 = F15*math.cos(C15)
E40 = F15*math.sin(C15)
E41 = 0
E42 = 1
## J4 FRAME
B45 = math.cos(C16)
B46 = math.sin(C16)
B47 = 0
B48 = 0
C45 = -math.sin(C16)*math.cos(D16)
C46 = math.cos(C16)*math.cos(D16)
C47 = math.sin(D16)
C48 = 0
D45 = math.sin(C16)*math.sin(D16)
D46 = -math.cos(C16)*math.sin(D16)
D47 = math.cos(D16)
D48 = 0
E45 = F16*math.cos(C16)
E46 = F16*math.sin(C16)
E47 = E16
E48 = 1
## J5 FRAME
B51 = math.cos(C17)
B52 = math.sin(C17)
B53 = 0
B54 = 0
C51 = -math.sin(C17)*math.cos(D17)
C52 = math.cos(C17)*math.cos(D17)
C53 = math.sin(D17)
C54 = 0
D51 = math.sin(C17)*math.sin(D17)
D52 = -math.cos(C17)*math.sin(D17)
D53 = math.cos(D17)
D54 = 0
E51 = F17*math.cos(C17)
E52 = F17*math.sin(C17)
E53 = E17
E54 = 1
## J6 FRAME
B57 = math.cos(C18)
B58 = math.sin(C18)
B59 = 0
B60 = 0
C57 = -math.sin(C18)*math.cos(D18)
C58 = math.cos(C18)*math.cos(D18)
C59 = math.sin(D18)
C60 = 0
D57 = math.sin(C18)*math.sin(D18)
D58 = -math.cos(C18)*math.sin(D18)
D59 = math.cos(D18)
D60 = 0
E57 = F18*math.cos(C18)
E58 = F18*math.sin(C18)
E59 = E18
E60 = 1
###################### TOOL FRAME ###########################
###################### Tool coordinate system ############################
B63 = math.cos(math.radians(J18))*math.cos(math.radians(J17))
B64 = math.sin(math.radians(J18))*math.cos(math.radians(J17))
B65 = -math.sin(math.radians(J18))
B66 = 0
C63 = -math.sin(math.radians(J18))*math.cos(math.radians(J16))+math.cos(math.radians(J18))*math.sin(math.radians(J17))*math.sin(math.radians(J16))
C64 = math.cos(math.radians(J18))*math.cos(math.radians(J16))+math.sin(math.radians(J18))*math.sin(math.radians(J17))*math.sin(math.radians(J16))
C65 = math.cos(math.radians(J17))*math.sin(math.radians(J16))
C66 = 0
D63 = math.sin(math.radians(J18))*math.sin(math.radians(J16))+math.cos(math.radians(J18))*math.sin(math.radians(J17))*math.cos(math.radians(J16))
D64 = -math.cos(math.radians(J18))*math.sin(math.radians(J16))+math.sin(math.radians(J18))*math.sin(math.radians(J17))*math.cos(math.radians(J16))
D65 = math.cos(math.radians(J17))*math.cos(math.radians(J16))
D66 = 0
E63 = J13
E64 = J14
E65 = J15
E66 = 1
## WF*J1
G24 = (B21*B27)+(C21*B28)+(D21*B29)+(E21*B30)
G25 = (B22*B27)+(C22*B28)+(D22*B29)+(E22*B30)
G26 = (B23*B27)+(C23*B28)+(D23*B29)+(E23*B30)
G27 = (B24*B27)+(C24*B28)+(D24*B29)+(E24*B30)
H24 = (B21*C27)+(C21*C28)+(D21*C29)+(E21*C30)
H25 = (B22*C27)+(C22*C28)+(D22*C29)+(E22*C30)
H26 = (B23*C27)+(C23*C28)+(D23*C29)+(E23*C30)
H27 = (B24*C27)+(C24*C28)+(D24*C29)+(E24*C30)
I24 = (B21*D27)+(C21*D28)+(D21*D29)+(E21*D30)
I25 = (B22*D27)+(C22*D28)+(D22*D29)+(E22*D30)
I26 = (B23*D27)+(C23*D28)+(D23*D29)+(E23*D30)
I27 = (B24*D27)+(C24*D28)+(D24*D29)+(E24*D30)
J24 = (B21*E27)+(C21*E28)+(D21*E29)+(E21*E30)
J25 = (B22*E27)+(C22*E28)+(D22*E29)+(E22*E30)
J26 = (B23*E27)+(C23*E28)+(D23*E29)+(E23*E30)
J27 = (B24*E27)+(C24*E28)+(D24*E29)+(E24*E30)
## (WF*J1)*J2
G30 = (G24*B33)+(H24*B34)+(I24*B35)+(J24*B36)
G31 = (G25*B33)+(H25*B34)+(I25*B35)+(J25*B36)
G32 = (G26*B33)+(H26*B34)+(I26*B35)+(J26*B36)
G33 = (G27*B33)+(H27*B34)+(I27*B35)+(J27*B36)
H30 = (G24*C33)+(H24*C34)+(I24*C35)+(J24*C36)
H31 = (G25*C33)+(H25*C34)+(I25*C35)+(J25*C36)
H32 = (G26*C33)+(H26*C34)+(I26*C35)+(J26*C36)
H33 = (G27*C33)+(H27*C34)+(I27*C35)+(J27*C36)
I30 = (G24*D33)+(H24*D34)+(I24*D35)+(J24*D36)
I31 = (G25*D33)+(H25*D34)+(I25*D35)+(J25*D36)
I32 = (G26*D33)+(H26*D34)+(I26*D35)+(J26*D36)
I33 = (G27*D33)+(H27*D34)+(I27*D35)+(J27*D36)
J30 = (G24*E33)+(H24*E34)+(I24*E35)+(J24*E36)
J31 = (G25*E33)+(H25*E34)+(I25*E35)+(J25*E36)
J32 = (G26*E33)+(H26*E34)+(I26*E35)+(J26*E36)
J33 = (G27*E33)+(H27*E34)+(I27*E35)+(J27*E36)
## (WF*J1*J2)*J3
G36 = (G30*B39)+(H30*B40)+(I30*B41)+(J30*B42)
G37 = (G31*B39)+(H31*B40)+(I31*B41)+(J31*B42)
G38 = (G32*B39)+(H32*B40)+(I32*B41)+(J32*B42)
G39 = (G33*B39)+(H33*B40)+(I33*B41)+(J33*B42)
H36 = (G30*C39)+(H30*C40)+(I30*C41)+(J30*C42)
H37 = (G31*C39)+(H31*C40)+(I31*C41)+(J31*C42)
H38 = (G32*C39)+(H32*C40)+(I32*C41)+(J32*C42)
H39 = (G33*C39)+(H33*C40)+(I33*C41)+(J33*C42)
I36 = (G30*D39)+(H30*D40)+(I30*D41)+(J30*D42)
I37 = (G31*D39)+(H31*D40)+(I31*D41)+(J31*D42)
I38 = (G32*D39)+(H32*D40)+(I32*D41)+(J32*D42)
I39 = (G33*D39)+(H33*D40)+(I33*D41)+(J33*D42)
J36 = (G30*E39)+(H30*E40)+(I30*E41)+(J30*E42)
J37 = (G31*E39)+(H31*E40)+(I31*E41)+(J31*E42)
J38 = (G32*E39)+(H32*E40)+(I32*E41)+(J32*E42)
J39 = (G33*E39)+(H33*E40)+(I33*E41)+(J33*E42)
## (WF*J1*J2*J3)*J4
G42 = (G36*B45)+(H36*B46)+(I36*B47)+(J36*B48)
G43 = (G37*B45)+(H37*B46)+(I37*B47)+(J37*B48)
G44 = (G38*B45)+(H38*B46)+(I38*B47)+(J38*B48)
G45 = (G39*B45)+(H39*B46)+(I39*B47)+(J39*B48)
H42 = (G36*C45)+(H36*C46)+(I36*C47)+(J36*C48)
H43 = (G37*C45)+(H37*C46)+(I37*C47)+(J37*C48)
H44 = (G38*C45)+(H38*C46)+(I38*C47)+(J38*C48)
H45 = (G39*C45)+(H39*C46)+(I39*C47)+(J39*C48)
I42 = (G36*D45)+(H36*D46)+(I36*D47)+(J36*D48)
I43 = (G37*D45)+(H37*D46)+(I37*D47)+(J37*D48)
I44 = (G38*D45)+(H38*D46)+(I38*D47)+(J38*D48)
I45 = (G39*D45)+(H39*D46)+(I39*D47)+(J39*D48)
J42 = (G36*E45)+(H36*E46)+(I36*E47)+(J36*E48)
J43 = (G37*E45)+(H37*E46)+(I37*E47)+(J37*E48)
J44 = (G38*E45)+(H38*E46)+(I38*E47)+(J38*E48)
J45 = (G39*E45)+(H39*E46)+(I39*E47)+(J39*E48)
## (WF*J1*J2*J3*J4)*J5
G48 = (G42*B51)+(H42*B52)+(I42*B53)+(J42*B54)
G49 = (G43*B51)+(H43*B52)+(I43*B53)+(J43*B54)
G50 = (G44*B51)+(H44*B52)+(I44*B53)+(J44*B54)
G51 = (G45*B51)+(H45*B52)+(I45*B53)+(J45*B54)
H48 = (G42*C51)+(H42*C52)+(I42*C53)+(J42*C54)
H49 = (G43*C51)+(H43*C52)+(I43*C53)+(J43*C54)
H50 = (G44*C51)+(H44*C52)+(I44*C53)+(J44*C54)
H51 = (G45*C51)+(H45*C52)+(I45*C53)+(J45*C54)
I48 = (G42*D51)+(H42*D52)+(I42*D53)+(J42*D54)
I49 = (G43*D51)+(H43*D52)+(I43*D53)+(J43*D54)
I50 = (G44*D51)+(H44*D52)+(I44*D53)+(J44*D54)
I51 = (G45*D51)+(H45*D52)+(I45*D53)+(J45*D54)
J48 = (G42*E51)+(H42*E52)+(I42*E53)+(J42*E54)
J49 = (G43*E51)+(H43*E52)+(I43*E53)+(J43*E54)
J50 = (G44*E51)+(H44*E52)+(I44*E53)+(J44*E54)
J51 = (G45*E51)+(H45*E52)+(I45*E53)+(J45*E54)
## (WF*J1*J2*J3*J4*J5)*J6
G54 = (G48*B57)+(H48*B58)+(I48*B59)+(J48*B60)
G55 = (G49*B57)+(H49*B58)+(I49*B59)+(J49*B60)
G56 = (G50*B57)+(H50*B58)+(I50*B59)+(J50*B60)
G57 = (G51*B57)+(H51*B58)+(I51*B59)+(J51*B60)
H54 = (G48*C57)+(H48*C58)+(I48*C59)+(J48*C60)
H55 = (G49*C57)+(H49*C58)+(I49*C59)+(J49*C60)
H56 = (G50*C57)+(H50*C58)+(I50*C59)+(J50*C60)
H57 = (G51*C57)+(H51*C58)+(I51*C59)+(J51*C60)
I54 = (G48*D57)+(H48*D58)+(I48*D59)+(J48*D60)
I55 = (G49*D57)+(H49*D58)+(I49*D59)+(J49*D60)
I56 = (G50*D57)+(H50*D58)+(I50*D59)+(J50*D60)
I57 = (G51*D57)+(H51*D58)+(I51*D59)+(J51*D60)
J54 = (G48*E57)+(H48*E58)+(I48*E59)+(J48*E60)
J55 = (G49*E57)+(H49*E58)+(I49*E59)+(J49*E60)
J56 = (G50*E57)+(H50*E58)+(I50*E59)+(J50*E60)
J57 = (G51*E57)+(H51*E58)+(I51*E59)+(J51*E60)
## (WF*J1*J2*J3*J4*J5*J6)*TF
G60 = (G54*B63)+(H54*B64)+(I54*B65)+(J54*B66)
G61 = (G55*B63)+(H55*B64)+(I55*B65)+(J55*B66)
G62 = (G56*B63)+(H56*B64)+(I56*B65)+(J56*B66)
G63 = (G57*B63)+(H57*B64)+(I57*B65)+(J57*B66)
H60 = (G54*C63)+(H54*C64)+(I54*C65)+(J54*C66)
H61 = (G55*C63)+(H55*C64)+(I55*C65)+(J55*C66)
H62 = (G56*C63)+(H56*C64)+(I56*C65)+(J56*C66)
H63 = (G57*C63)+(H57*C64)+(I57*C65)+(J57*C66)
I60 = (G54*D63)+(H54*D64)+(I54*D65)+(J54*D66)
I61 = (G55*D63)+(H55*D64)+(I55*D65)+(J55*D66)
I62 = (G56*D63)+(H56*D64)+(I56*D65)+(J56*D66)
I63 = (G57*D63)+(H57*D64)+(I57*D65)+(J57*D66)
J60 = (G54*E63)+(H54*E64)+(I54*E65)+(J54*E66)
J61 = (G55*E63)+(H55*E64)+(I55*E65)+(J55*E66)
J62 = (G56*E63)+(H56*E64)+(I56*E65)+(J56*E66)
J63 = (G57*E63)+(H57*E64)+(I57*E65)+(J57*E66)边栏推荐
- Can gbase 8A view the location of SQL statement history?
- Data communication foundation OSPF Foundation
- 修改pyunit_time使得其支持‘xx~xx月’的时间文本
- Your childhood happiness was contracted by it
- P1451 calculate the number of cells / 1329: [example 8.2] cells
- Definition of episodic and batch
- episodic和batch的定义
- Go learning ----- relevant knowledge of JWT
- verilog实现计算最大公约数和最小公倍数
- 数学建模之层次分析法(含MATLAB代码)
猜你喜欢
![16.[STM32]从原理开始带你了解DS18B20温度传感器-四位数码管显示温度](/img/9f/c91904b6b1d3a1e85c0b50e43972e5.jpg)
16.[STM32]从原理开始带你了解DS18B20温度传感器-四位数码管显示温度
Bugku's steganography
Bugku cyberpunk

SQL injection sqllabs (basic challenges) 1-10
MySQL giant pit: update updates should be judged with caution by affecting the number of rows!!!
Summary of the second lesson

Object. defineProperty() - VS - new Proxy()

I spring and autumn blasting-2

Stop B makes short videos, learns Tiktok to die, learns YouTube to live?

Value series solution report
随机推荐
Interval DP (gravel consolidation)
PHP high concurrency and large traffic solution (PHP interview theory question)
go语言编程规范梳理总结
Summary of the third class
Appium automation test foundation - appium basic operation API (I)
The difference between SQL Server char nchar varchar and nvarchar
vulnhub-Root_ this_ box
修改pyunit_time使得其支持‘xx~xx月’的时间文本
Severlet learning foundation
Maximum common subsequence
Noi / 1.4 07: collect bottle caps to win awards
P6183 [USACO10MAR] The Rock Game S
Number protection AXB function! (essence)
sql server char nchar varchar和nvarchar的区别
如何将 DevSecOps 引入企业?
16.[STM32]从原理开始带你了解DS18B20温度传感器-四位数码管显示温度
vlunhub- BoredHackerBlog Social Network
MySQL table field adjustment
Data communication foundation - dynamic routing protocol rip
Can gbase 8A view the location of SQL statement history?