当前位置:网站首页>Ind yff first week
Ind yff first week
2022-07-03 10:31:00 【IFI_ rccsim】
1. Considering the goalkeeper's lack of sensitivity , When the opponent attacks the last barrier , The probability of interception can be increased by letting the goalkeeper pace back and forth in front of the goal , Achieve the goal keeping effect .
2. When choosing a strategic formation , After many observations of the robot , And use Matlab Plot the generated data , Thus to the specific parameters , After repeated comparison and practice, we get the best strategic formation . Because in use CMA-ES Too few factors are considered when the algorithm optimizes gait , Resulting in poor optimization effect , Further improvements are needed . When adjusting the kick angle , With the help of external software , Get a reference , Further modify the parameters of the angle .
3. attack : The forward adopts the triangle encirclement strategy , Grab the ball with the nearest player , At different stages of the game , Use different offensive strategies , Different players have different responsibilities .: Fast players , I arranged for them to defend in midfield , A good player , I arrange 1 One in the rear to grab and pass , Introduction to football .
4. To solve defensive problems , In defense, according to the position of the ball and the prediction of the position of the opponent's offensive players , Take the initiative to form an effective network defense system , Let the players in the middle and front court actively delay after losing the ball 、 Even counter rob , The players cooperate and use the broken ball to run and mark to slow down the process of the opponent's advance , Then the defender quickly retreats and stands in his defensive position , Adopt the combination of regional defense and key defense , Form a three-dimensional defense system similar to Barcelona . At the same time, we add the dynamic movement of our own players in the other half and modify the defensive players' own position 、 Set kick-off 、 With the ball 、 Support 、 A shot ( In the process of attack , Strive to be swift and steady , While attacking , While doing a good job in the counter attack strategy after losing the ball ), So that the middle and front court players can effectively delay and defend , Form backcourt area defense , Midfield interception , Front court backtracking , Make the team's defensive ability significantly improved .
5. The basic idea of the artificial potential field method is to move the robot in the surrounding environment , Designed as an abstract role in the artificial gravitational field , The target point affects the mobile robot “ Gravity ”, Obstacles affect mobile robots “ repulsion ”, Finally, the motion of the mobile robot is controlled by the joint force . The path planned by this method is generally smooth and safe .
6. Regional standing method , This is a relatively simple method of standing , It divides the stadium into several areas , The danger level of each area is different , The closer you get to the goal, the higher the danger level , Then, according to the danger level, the player's position .
7. About big feet : Adopt hierarchical learning , The specific design includes UCA Curve design . Gait planning of biped robot : Robot positioning ( Matrix algorithm , Number of players , List the distance from the player to a certain point , Minimum calculation ) And KALMA wave filtering , The curve matrix does not intersect , Prevent players from colliding .
边栏推荐
- Tensorflow - tensorflow Foundation
- A complete mall system
- 20220602 Mathematics: Excel table column serial number
- Leetcode-106: construct a binary tree according to the sequence of middle and later traversal
- Deep Reinforcement learning with PyTorch
- Tensorflow—Image segmentation
- LeetCode - 900. RLE iterator
- 2.1 Dynamic programming and case study: Jack‘s car rental
- Convolutional neural network (CNN) learning notes (own understanding + own code) - deep learning
- Leetcode刷题---283
猜你喜欢
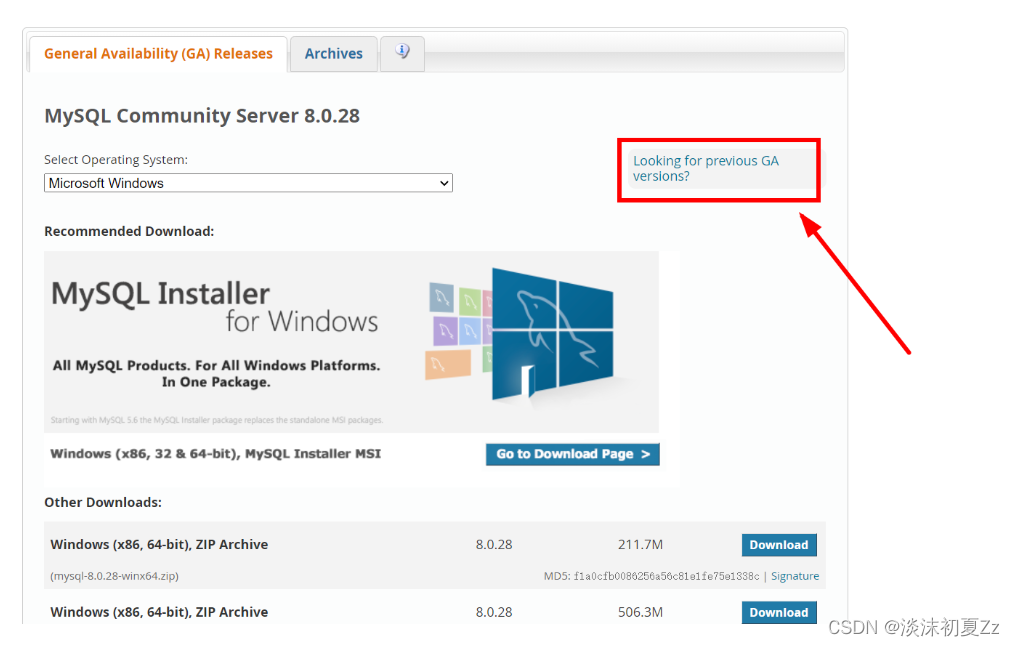
mysql5.7安装和配置教程(图文超详细版)
Configure opencv in QT Creator

Convolutional neural network (CNN) learning notes (own understanding + own code) - deep learning
Yolov5 creates and trains its own data set to realize mask wearing detection

八、MySQL之事务控制语言

Neural Network Fundamentals (1)

Matplotlib drawing
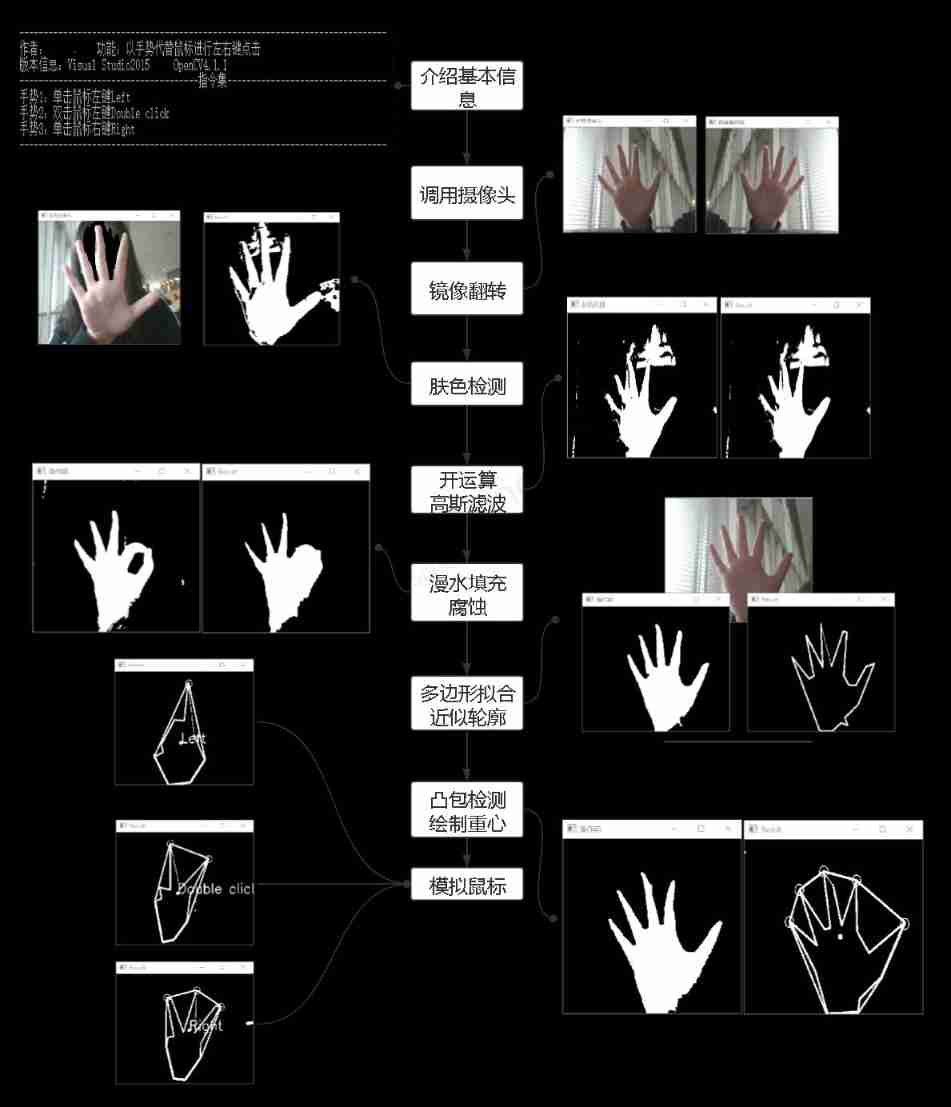
Simple real-time gesture recognition based on OpenCV (including code)

安装yolov3(Anaconda)
2018 Lenovo y7000 black apple external display scheme
随机推荐
Notes - regular expressions
Leetcode刷题---202
【C 题集】of Ⅵ
Hands on deep learning pytorch version exercise solution -- implementation of 3-2 linear regression from scratch
Leetcode刷题---832
Leetcode刷题---704
Leetcode刷题---1
Tensorflow—Neural Style Transfer
20220603 Mathematics: pow (x, n)
Seata分布式事务失效,不生效(事务不回滚)的常见场景
Leetcode刷题---374
4.1 Temporal Differential of one step
Leetcode-513:找树的左下角值
Leetcode刷题---35
OpenCV Error: Assertion failed (size.width>0 && size.height>0) in imshow
Simple real-time gesture recognition based on OpenCV (including code)
20220606数学:分数到小数
20220602数学:Excel表列序号
Leetcode - 1172 plate stack (Design - list + small top pile + stack))
[LZY learning notes -dive into deep learning] math preparation 2.5-2.7