当前位置:网站首页>Progressive multi grasp detection using grasp path for rgbd images
Progressive multi grasp detection using grasp path for rgbd images
2022-07-03 05:16:00 【Qianyu QY】
The current plane grab detection is mainly based on Jiang stay 2014 Rectangular grab representation proposed in , Its biggest disadvantage is , It is impossible to mark the grab truth value of the object in detail ( Or the existing data sets are not fully annotated ), Lead to two problems :
(1) Cannot provide perfect truth value for neural network ;
(2) Unable to accurately verify , Because a practical predictive crawl may not meet the verification criteria , namely IOU>0.25 & angle<30, vice versa .
An easy solution is , Annotate the data set at pixel level , Make the grab of the annotation as close to the true value as possible , But this plan is difficult to achieve , Alternative ,Chen A simplified method is proposed , That is, the paper introduced in this paper :
@article{***,
author = {Lu Chen and Panfeng Huang and Zhongjie Meng},
title = {Convolutional multi-grasp detection using grasp path for {RGBD} images},
journal = {Robotics Auton. Syst.},
volume = {113},
pages = {94--103},
year = {2019}
}The paper is divided into two parts : Introduce the crawl path , Crawl detection network . Here we mainly introduce the concept of crawl path .
One 、 Grab path
Crawl path is introduced as the truth value of network learning , It's some curves on the image , Every point on the curve can be used as a grab point , The normal direction at the grab point is taken as the grab angle , The width and height of the grab frame are given by the predicted grab ( Let's introduce ).
The crawl path is determined by Cornell The data set is generated by the original annotation rectangle , The specific way is : Connect the midpoint of any two overlapping rectangular boxes . This operation is applicable to most situations , Here's the picture ( Left ), But when all three rectangles have overlapping areas , Redundant crawl paths will be generated , When the shape of an object is complex , The generated crawl path may violate common sense , Here's the picture ( in ) and ( Right ):

In order to cope with the above two situations , The author puts forward solutions respectively , among , In response to the second situation , Even using neural networks .
An example of the finally generated crawl path is shown in the following figure :

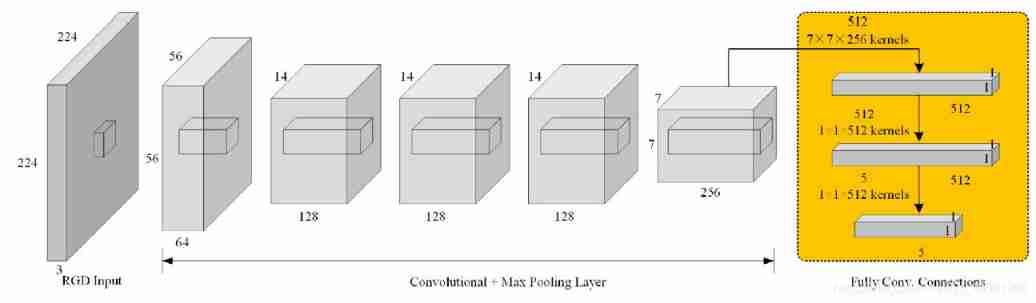
Two 、 How to use crawl path
The author draws lessons from a few years ago ICRA A paper on the network structure for crawl detection , It's not detailed here , Here's the picture :
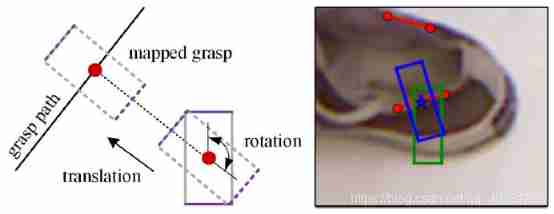
In order to calculate the loss of the network , You need to know the truth value capture corresponding to the predicted capture , This truth grab is obtained by predicting the grab and the grab path . First, make a vertical line from the midpoint of the predicted grasp to the nearest grasp path , The intersection is the grab point of truth value grab , The angle of the vertical line is the grasping angle of the truth value grasp , The height and width of the truth grab are equal to the width and height of the predicted grab , Then calculate the loss and back-propagation . Again , The truth fetching used for validation in the validation phase is the same as above . The generation process of truth grab is shown in the following figure ( The solid line box is predictive crawl , Dashed boxes are truth grabs ):
give the result as follows :
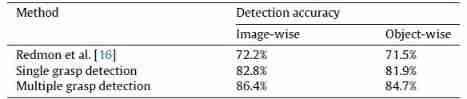
The author is in another article (Detecting Graspable Rectangles of Objects in Robotic Grasping) In the said , The low accuracy is due to the simple network structure , After changing to a better network structure , Accuracy of 94.6%.
3、 ... and 、 summary
I think the starting point of this article is good , Optimize the training process by generating a more detailed grab truth , But there are still the following problems :
(1) The width and height of the grab truth box should not be given by the predicted grab box , Because the predicted value may not meet the capture requirements , Such as too long or too short .
(2) The automatically generated crawl path is more detailed than the crawl box , But there are intermittent situations , It is even quite different from the edge of the object .
(3) Can another crawl path parallel to the crawl path and only one pixel away be taken as the true value , That is, capturing the truth value is not just a line , It should be an area .
Finally, shamelessly recommend your own B Station No , Occasionally upload robot Related videos

边栏推荐
- [basic grammar] Snake game written in C language
- Redis breakdown penetration avalanche
- Oracle SQL table data loss
- [clock 223] [binary tree] [leetcode high frequency]: 102 Sequence traversal of binary tree
- Problems encountered in fuzzy query of SQL statements
- 联想R7000显卡的拆卸与安装
- Detailed explanation of the output end (head) of yolov5 | CSDN creation punch in
- Webapidom get page elements
- [research materials] 2021 China's game industry brand report - Download attached
- [set theory] relationship properties (symmetry | symmetry examples | symmetry related theorems | antisymmetry | antisymmetry examples | antisymmetry theorems)
猜你喜欢

Go practice - gorilla / handlers used by gorilla web Toolkit
The principle is simple, but I don't know how to use it? Understand "contemporaneous group model" in one article
![[research materials] 2022q1 game preferred casual game distribution circular - Download attached](/img/13/5a67c5d08131745759fdc70a71cf0f.jpg)
[research materials] 2022q1 game preferred casual game distribution circular - Download attached
leetcode406. Rebuild the queue based on height

Coordinatorlayout appbarrayout recyclerview item exposure buried point misalignment analysis

Use posture of sudo right raising vulnerability in actual combat (cve-2021-3156)

SSM framework integration
2022-02-11 daily clock in: problem fine brush
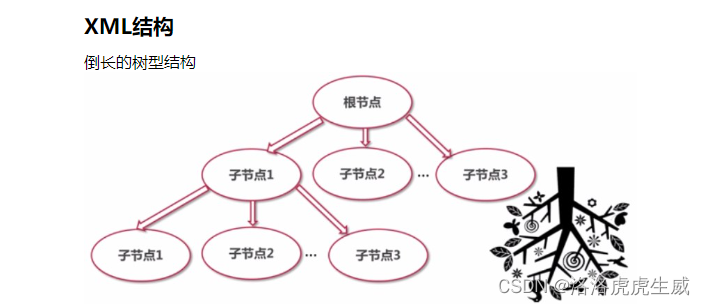
XML配置文件
乾元通多卡聚合路由器的技术解析
随机推荐
appium1.22. Appium inspector after X version needs to be installed separately
Skip table: principle introduction, advantages and disadvantages of skiplist
[clock 223] [binary tree] [leetcode high frequency]: 102 Sequence traversal of binary tree
leetcode452. Detonate the balloon with the minimum number of arrows
The principle is simple, but I don't know how to use it? Understand "contemporaneous group model" in one article
Use posture of sudo right raising vulnerability in actual combat (cve-2021-3156)
Source insight garbled code solution
Redis expiration elimination mechanism
Configure and use Anaconda environment in pycharm
5-36v input automatic voltage rise and fall PD fast charging scheme drawing 30W low-cost chip
Celebrate the new year together
1110 complete binary tree (25 points)
1106 lowest price in supply chain (25 points)
Dynamic programming - related concepts, (tower problem)
[batch dos-cmd command - summary and summary] - CMD window setting and operation command - close CMD window and exit CMD environment (exit, exit /b, goto: EOF)
Introduction to webrtc protocol -- an article to understand dtls, SRTP, srtcp
Common interview questions of microservice
1099 build a binary search tree (30 points)
Gbase8s composite index (I)
The IntelliJ platform completely disables the log4j component