当前位置:网站首页>ModuleNotFoundError: No module named ‘picamera‘
ModuleNotFoundError: No module named ‘picamera‘
2022-07-05 07:11:00 【Weft collar network】
install picamera It can't be installed , Execute in terminal
1.On Windows, execute: set READTHEDOCS=True
2'.On Unix based systems, execute: export READTHEDOCS=True
3.Now execute: pip install picamera
And then in the
pip intall picamera Installation successful ,
That's all right.
边栏推荐
- 【Node】npm、yarn、pnpm 区别
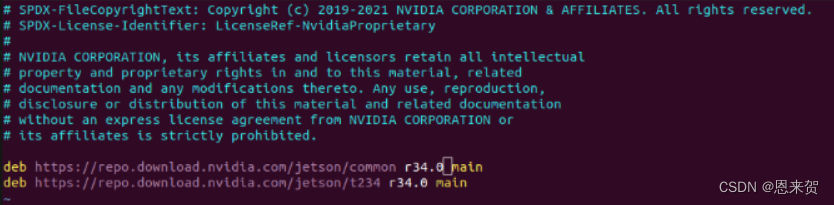
- Ros2 - install ros2 (III)
- [tf1] save and load parameters
- [OBS] x264 Code: "buffer_size“
- Concurrent programming - how to interrupt / stop a running thread?
- Ethtool principle introduction and troubleshooting ideas for network card packet loss (with ethtool source code download)
- Build a microservice cluster environment locally and learn to deploy automatically
- iNFTnews | 喝茶送虚拟股票?浅析奈雪的茶“发币”
- [software testing] 02 -- software defect management
- ROS2——工作空间(五)
猜你喜欢
Orin installs CUDA environment
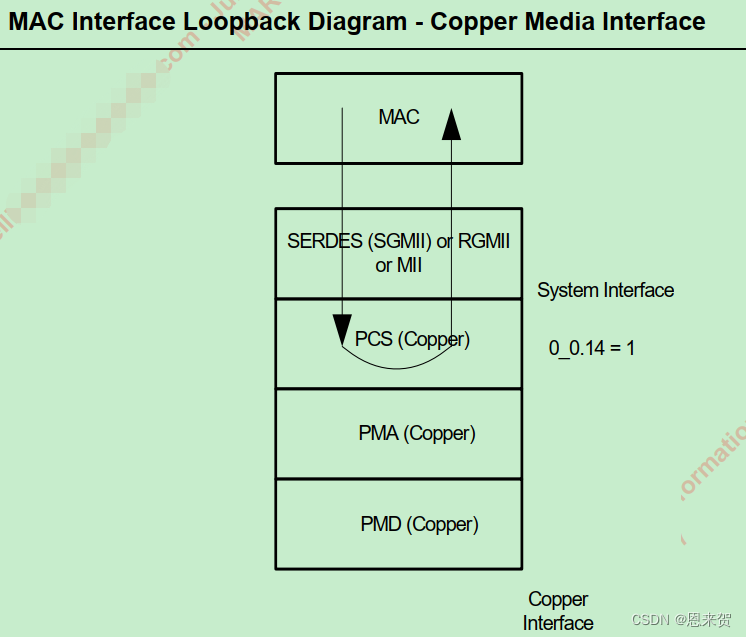
Marvell 88E1515 PHY loopback模式测试
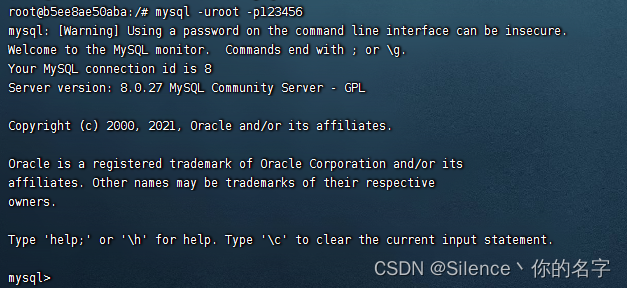
Docker installs MySQL and uses Navicat to connect
ROS2——配置开发环境(五)
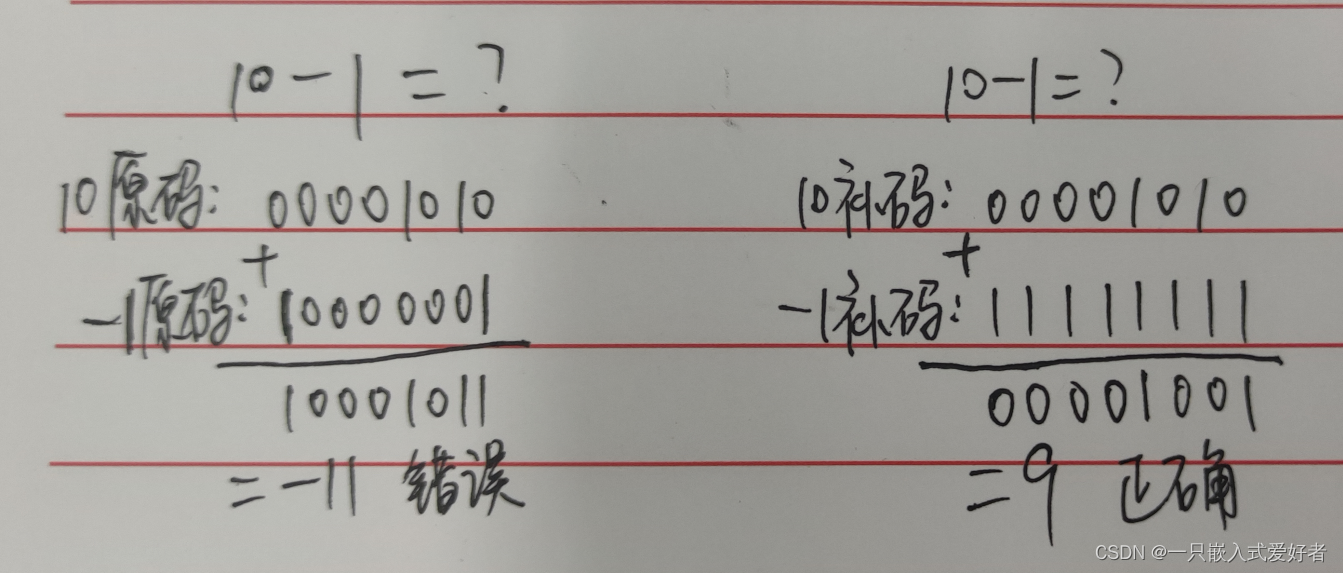
Negative number storage and type conversion in programs
Special training of C language array
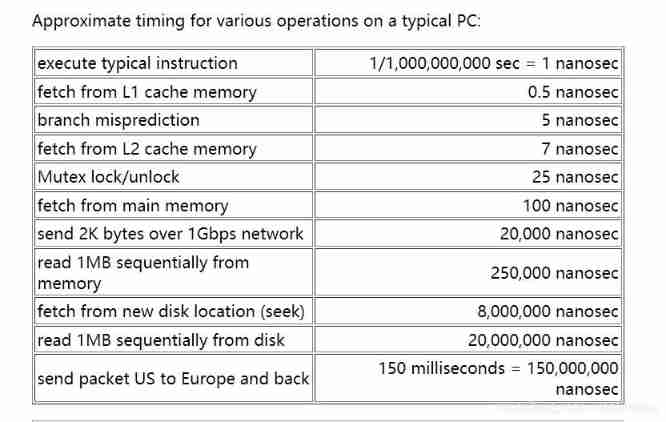
Instruction execution time
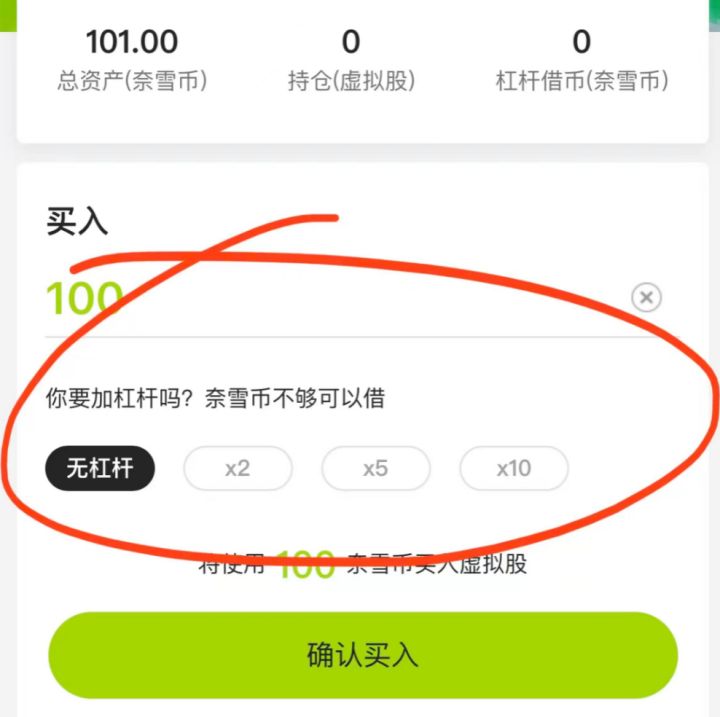
iNFTnews | 喝茶送虚拟股票?浅析奈雪的茶“发币”
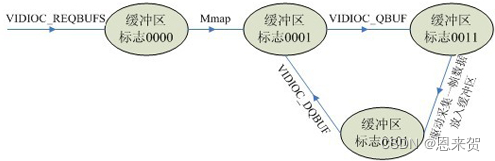
inux摄像头(mipi接口)简要说明
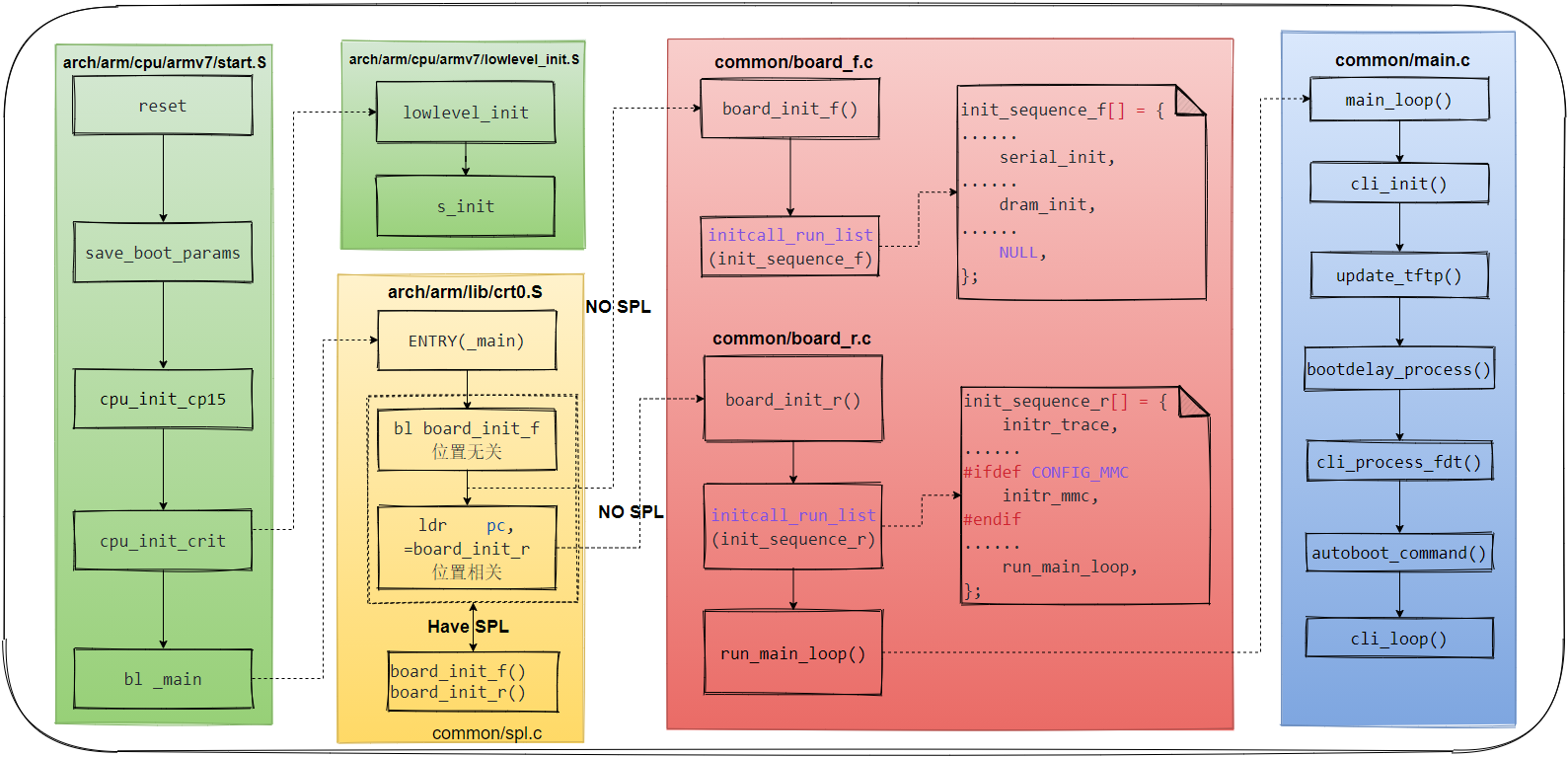
U-boot initialization and workflow analysis
随机推荐
Use the Paping tool to detect TCP port connectivity
IPage can display data normally, but total is always equal to 0
CGroup CPU group source code analysis
[vscode] recommended plug-ins
Error: “MountVolume.SetUp failed for volume pvc 故障处理
C语言数组专题训练
程序中的负数存储及类型转换
Inftnews | drink tea and send virtual stocks? Analysis of Naixue's tea "coin issuance"
Application of MATLAB in Linear Algebra (4): similar matrix and quadratic form
kata container
The difference between NPM install -g/-save/-save-dev
Mathematical analysis_ Notes_ Chapter 8: multiple integral
Special training of C language array
一文揭开,测试外包公司的真实情况
网易To B,柔外刚中
使用paping工具进行tcp端口连通性检测
ROS2——node节点(七)
Orin installs CUDA environment
Xavier CPU & GPU 高负载功耗测试
Literacy Ethernet MII interface types Daquan MII, RMII, smii, gmii, rgmii, sgmii, XGMII, XAUI, rxaui