当前位置:网站首页>Ros2 - install ros2 (III)
Ros2 - install ros2 (III)
2022-07-05 06:51:00 【Me and nano】
ROS Robot operating system
List of articles
Preface
I've learned about ROS2 What is it? , If a worker wants to do a good job, he must sharpen his tools first , Now let's install ROS2.
One 、 Step on the pit diary
Remember to install a new 22.04 The system of ,20.04 What happened , It's been a whole afternoon, but it hasn't been solved , A new system , All the way unimpeded .
Two 、 Source change
1. Replace the source of China University of science and technology
Enter the following command
sudo gedit /etc/apt/sources.list
sudo apt-get update
sudo apt-get upgrade
Replace... With the following
deb https://mirrors.ustc.edu.cn/ubuntu/ jammy main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ jammy main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ jammy-updates main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ jammy-updates main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ jammy-backports main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ jammy-backports main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ jammy-security main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ jammy-security main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ jammy-proposed main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ jammy-proposed main restricted universe multiverse
Save and exit
3、 ... and 、 install ROS2
1. Set encoding
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
2. Add source
sudo apt update && sudo apt install curl gnupg lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
There may be a mistake here
perform
sudo vi /etc/hosts
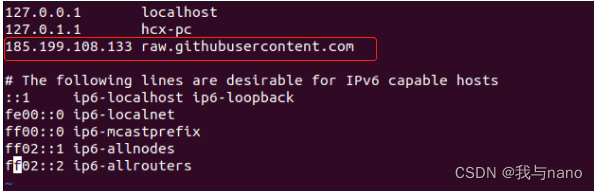
Add the following sentence , Just execute it again
185.199.108.133 raw.githubusercontent.com
3. install ROS2
sudo apt update
sudo apt upgrade
sudo apt install ros-humble-desktop
4. Set the environment variable
source /opt/ros/humble/setup.bash
echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc
Four 、 Example of Little Turtle
function
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key
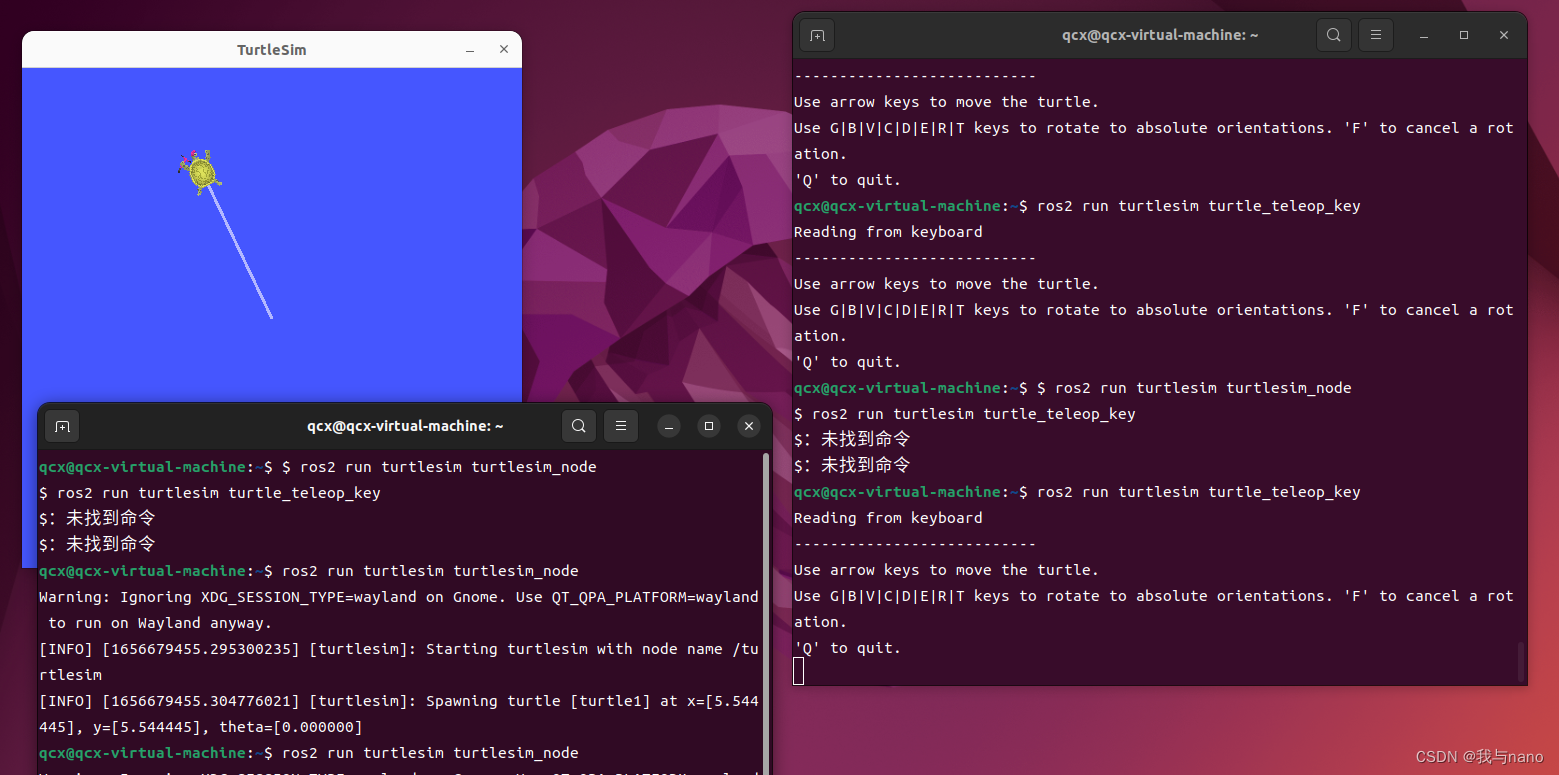
You can see the little turtle coming out , thus ROS2 Installation completed .
summary
ROS2 The installation of stepped on thunder , use 22.04 clear , If there are other problems in the process, you need to solve them yourself .
边栏推荐
- Qt项目中的日志库log4qt使用
- Technology blog learning website
- 'mongoexport 'is not an internal or external command, nor is it a runnable program or batch file.
- Dameng database all
- Xavier CPU & GPU 高负载功耗测试
- H5内嵌App适配暗黑模式
- [nvidia] CUDA_ VISIBLE_ DEVICES
- *P++, (*p) + +, * (p++) differences
- mingling
- Error: “MountVolume.SetUp failed for volume pvc 故障处理
猜你喜欢


随机推荐
LSA Type Explanation - lsa-1 [type 1 LSA - router LSA] detailed explanation
Financial risk control practice -- feature derivation based on time series
SolidWorks template and design library are convenient for designers to call
LSA Type Explanation - lsa-5 (type 5 LSA - autonomous system external LSA) and lsa-4 (type 4 LSA - ASBR summary LSA) explanation
6-4 search by serial number of linked list
SD_CMD_SEND_SHIFT_REGISTER
达梦数据库全部
使用paping工具进行tcp端口连通性检测
Some classic recursion problems
H5 模块悬浮拖动效果
[QT] QT multithreading development qthread
vim
Redis-01. First meet redis
代码中的英语全部
Markdown syntax
Ros2 - workspace (V)
Spinningup drawing curve
cgroup_ memcg
Orin installs CUDA environment
UIO driven framework