当前位置:网站首页>Unity3D_ Class fishing project, bullet rebound effect is achieved
Unity3D_ Class fishing project, bullet rebound effect is achieved
2022-07-07 15:52:00 【Le_ Sam】
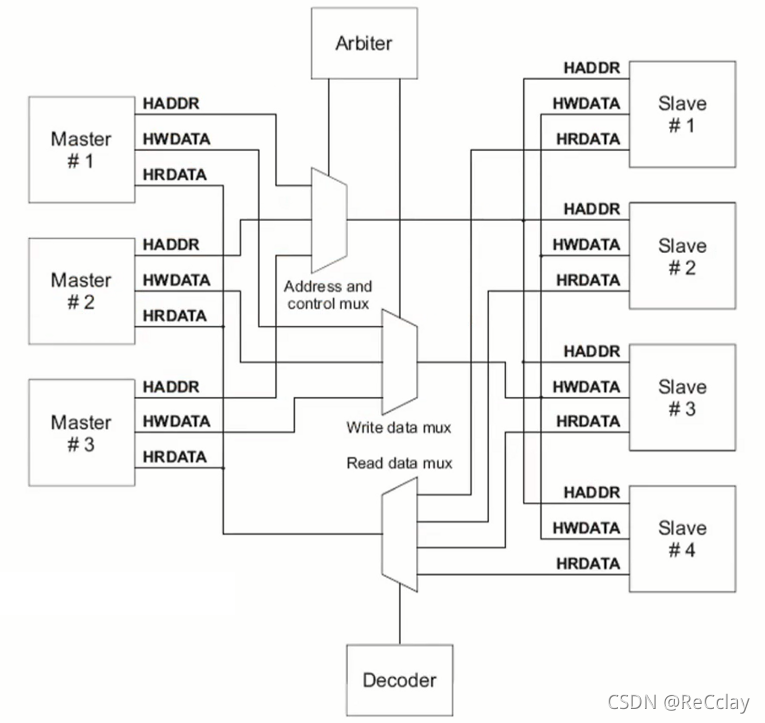
The bullet rebound diagram is as follows :
1. Both the wall and the bullet are collision bodies
2. Prerequisite : You need to know the direction vector of the bullet , Wall direction vector
3. Simple calculation process , Yellow is the bullet direction vector , Calculate the included angle with the wall , Calculate the orange direction vector according to the incident angle equal to the reflection angle . At this time, only the direction of the bullet changed , Next, calculate the offset of the position , According to the angle with the wall and the size of the bullet itself, the trigonometric function sin/cos Calculate the offset , The final effect is like the red arrow .
Code :
-- The bullet bounced ,ColliderObj: Collision wall total 4 Noodles .
-- self.bulletObjLength Estimate the bullet length , self.Dir Is the current direction vector of the bullet , self.o_Transform For example bullets
function BCAmmoBase:ReflectBullet(ColliderObj)
-- inNormal: Wall direction vector , Used to calculate the reflection angle , Is the normal
-- XOrZ: Determine whether the bullet hit the horizontal wall or the vertical wall
-- iden: The sign of the wall where the bullet hit , Used to record the wall of the last collision
local inNormal, XOrZ, iden = nil
if tostring(ColliderObj.transform.name) == "ForwardWall" then
inNormal = Vector3(0, 0, -1)
XOrZ = true
iden = "F"
elseif tostring(ColliderObj.transform.name) == "BackWall" then
inNormal = Vector3(0, 0, 1)
XOrZ = true
iden = "B"
elseif tostring(ColliderObj.transform.name) == "LeftWall" then
inNormal = Vector3(1, 0, 0.1)
XOrZ = false
iden = "L"
elseif tostring(ColliderObj.transform.name) == "RightWall" then
inNormal = Vector3(-1, 0, 0.1)
XOrZ = false
iden = "R"
end
if inNormal == nil or iden == nil then
-- log("inNormal == nil or iden == nil ")
return
end
-- To avoid bullets flying out of the wall , It is forbidden to bounce multiple times on the same wall
if iden == self.collideLastIden then
-- log("iden == self.collideLastIden ")
return
end
self.collideLastIden = iden
self.collideInNormal = inNormal
self.collideXOrZ = XOrZ
local reflexDir = Vector3.Reflect(self.Dir, self.collideInNormal)
local dirAngle = 90 - Vector3.Angle(reflexDir, self.collideInNormal)
local dic = math.sin(math.rad(dirAngle)) * self.bulletObjLength
-- log(tostring(reflexDir) .. " Reflection vector ")
-- log(tostring(dirAngle) .. " The angle between the reflection vector and the position correction ")
-- log(tostring(dic) .. " Position correction ")
-- Position correction
local pos = self.o_Transform.position
if self.collideXOrZ then
self.o_Transform.position = reflexDir.x >= 0 and pos + Vector3(dic, 0, 0) or pos - Vector3(dic, 0, 0)
else
self.o_Transform.position = reflexDir.z >= 0 and pos + Vector3(0, 0, dic) or pos - Vector3(0, 0, dic)
end
-- Direction correction
local dir = Vector3.Normalize(reflexDir)
self.Dir = Vector3(dir.x, 0, dir.z) -- Y The shaft is fixed to 0, Avoid tilting bullets up or down
self.o_Transform.rotation = Quaternion.FromToRotation(Vector3.forward, self.Dir)
end
边栏推荐
- Ida Pro reverse tool finds the IP and port of the socket server
- 星瑞格数据库入围“2021年度福建省信息技术应用创新典型解决方案”
- Numpy --- basic learning notes
- 有钱人买房就是不一样
- [wechat applet] Chapter (5): basic API interface of wechat applet
- Webgl texture
- [quick start of Digital IC Verification] 20. Basic grammar of SystemVerilog learning 7 (coverage driven... Including practical exercises)
- XMIND frame drawing tool
- Monthly observation of internet medical field in May 2022
- 强化实时数据管理,英方软件助力医保平台安全建设
猜你喜欢
【数字IC验证快速入门】23、SystemVerilog项目实践之AHB-SRAMC(3)(AHB协议基本要点)

Getting started with webgl (2)
Asynchronous application of generator function
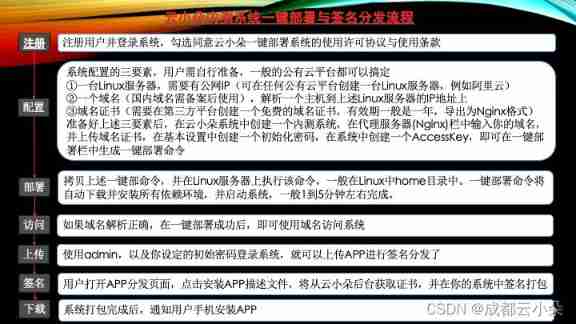
Yunxiaoduo software internal test distribution test platform description document
Vite path alias @ configuration
Numpy --- basic learning notes
Numpy -- epidemic data analysis case

Async and await
Starting from 1.5, build a microservice framework link tracking traceid

Ida Pro reverse tool finds the IP and port of the socket server
随机推荐
【数字IC验证快速入门】22、SystemVerilog项目实践之AHB-SRAMC(2)(AMBA总线介绍)
JS array foreach source code parsing
OpenGL's distinction and understanding of VAO, VBO and EBO
[quick start of Digital IC Verification] 18. Basic grammar of SystemVerilog learning 5 (concurrent threads... Including practical exercises)
unnamed prototyped parameters not allowed when body is present
Annexb and avcc are two methods of data segmentation in decoding
Spin animation of Cocos performance optimization
Detailed explanation of unity hot update knowledge points and introduction to common solution principles
[original] all management without assessment is nonsense!
AB package details in unity (super detail, features, packaging, loading, manager)
Unity的三种单例模式(饿汉,懒汉,MonoBehaviour)
有钱人买房就是不一样
XMIND frame drawing tool
Vertex shader to slice shader procedure, varying variable
Basic knowledge sorting of mongodb database
Virtual memory, physical memory /ram what
航天宏图信息中标乌鲁木齐某单位数据库系统研发项目
Numpy -- data cleaning
Getting started with webgl (1)
The "go to definition" in VS2010 does not respond or prompts the solution of "symbol not found"