当前位置:网站首页>施努卡:什么是视觉定位系统 视觉系统如何定位
施努卡:什么是视觉定位系统 视觉系统如何定位
2022-07-06 03:18:00 【施努卡机器视觉】
关于施努卡
施努卡(SCHNOKA)成立于2010年,先后在上海,苏州及武汉建立了分公司。国家高新技术企业,致力于打造面向智能产线与智慧工厂最强控制大脑的高科技公司。公司围绕感知&识别核心技术构建智能装备,基于机器人视觉算法与单机器人工作站、多机器人群体共融、行业定制化应用。打造产品体系,面向智能生产线、智慧物流等场景实现软件定义智能。
SCHNOKA (施努卡)在3D机器视觉算法、机器人柔性控制、手眼协同融合、产线级机器人协同、工厂级智能规划与调度等方面均由领先技术和行业落地应用,在汽车工业智能分拣产线、大尺寸高精度三维量测、大场景物流搬运机器人智能分拣等方面有丰富的项目经验。
SCHNOKA(施努卡)的多个核心产品汽车工业标杆生产线、锂电新能源灯塔工厂、工程机械智慧工厂、智慧物流等多个领域多个场景应用落地。已经和百亚国际、稳健医疗、米老头集团、维达纸业、一汽大众、上汽大众、沃尔沃汽车、奇瑞捷豹路虎、吉利汽车、长安汽车、上汽通用五菱、长城蜂巢新能源、三一重工、中航工业沈飞、中隧集团、西门子高压开关、中国中车、ABB(中国)等国内外知名企业建立了良好的伙伴合作关系,获得头部客户广泛好评。
什么是视觉定位系统
随着科技的发展,视觉定位技术已经成为工业机器人获得环境信息的主要技术,能够实现在工业生产中的一些自主判断能力的提升,大大提升工作的质量和效率。那么的,视觉定位系统的组成是什么?它是由哪几部分组成的呢?
视觉系统的组成部分主要包括两个方面,一个是硬件组成部分,一个是软件开发部分。我们接下来先看硬件组成部分。
1、硬件组成部分
视觉系统的硬件组成部分主要包括光源、镜头、摄像机以及摄像机与计算机连接的接口。这些硬件的功能也分别如下:光源是为了使得被探测的物体的基本特征能够被识别;镜头是为了能够把物体清晰的图像呈现出来,摄像机主要就是为了能够把图像信息转化为熟悉信息,而摄像机与计算机连接的接口则是为了把上面获取的一些视频或是数字信息存储起来,进行研究。视觉定位系统中的接口一般采用的都是采集卡或是USB2.0.
2、软件开发部分
视觉定位系统的软件开发部分主要由图像获取、摄像机标定和获取发送目标点的坐标三部分组成。
(1)图像获取
(2)摄像机标定
(3)获取和发送目标点的坐标
视觉系统如何定位
随着工业自动化的蓬勃发展,很多制造商在产品的生产过程中,总会出现一些瑕疵品,不良品,有的部件不吻合,有的畸形产品等,产品贴合偏差等等。有时人工无法达到要求的精度时,机器视觉系统的定位/对准/对位。在如下举例的工序中,运用视觉系统的定位/对准/对位,顺利完成了高精度的制造工序。
1.定位玻璃印刷电路板
2.测量标签及条码的偏移
3.辨别IC芯片等的方向
4.检测食品容器盖的偏移
5.控制工作设备的位置(机械手视觉)等
边栏推荐
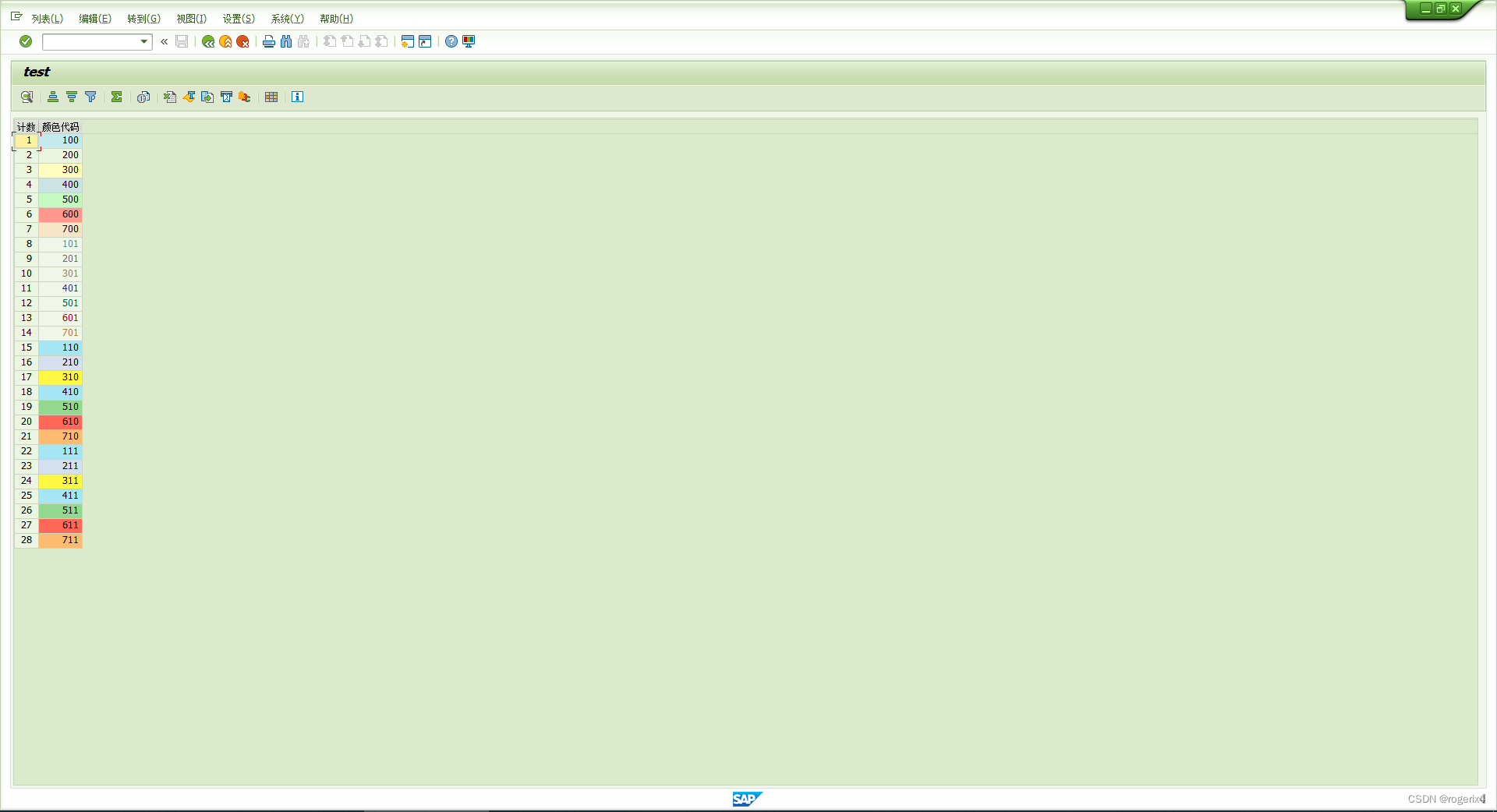
- SAP ALV单元格级别设置颜色
- 【SLAM】ORB-SLAM3解析——跟踪Track()(3)
- SAP ALV颜色代码对应颜色(整理)
- 1003 emergency (25 points), "DIJ deformation"
- XSS challenges绕过防护策略进行 XSS 注入
- How to do function test well
- 【指针训练——八道题】
- Exness foreign exchange: the governor of the Bank of Canada said that the interest rate hike would be more moderate, and the United States and Canada fell slightly to maintain range volatility
- 出现Permission denied的解决办法(750权限谨慎使用)
- codeforces每日5題(均1700)-第六天
猜你喜欢





随机推荐
Daily question brushing plan-2-13 fingertip life
MySQL advanced notes
Codeworks 5 questions per day (1700 average) - day 6
Safety science to | travel, you must read a guide
My C language learning record (blue bridge) -- on the pointer
Force buckle 1189 Maximum number of "balloons"
Redis SDS principle
真机无法访问虚拟机的靶场,真机无法ping通虚拟机
【Rust 笔记】18-宏
XSS challenges bypass the protection strategy for XSS injection
Overview of OCR character recognition methods
MPLS experiment
银行核心业务系统性能测试方法
[unity3d] GUI control
Shell 传递参数
建模规范:命名规范
Microsoft Research, UIUC & Google research | antagonistic training actor critic based on offline training reinforcement learning
下一个行业风口:NFT 数字藏品,是机遇还是泡沫?
Performance analysis of user login TPS low and CPU full
StrError & PERROR use yyds dry inventory