当前位置:网站首页>Raspberry pie 4B arm platform aarch64 PIP installation pytorch
Raspberry pie 4B arm platform aarch64 PIP installation pytorch
2022-07-05 07:11:00 【Weft collar network】
For example, you need to install torch1.7.1 Version of , You execute the following command
pip3 install torch==1.7.1 torchvision==0.8.2 torchaudio==0.7.2 -f https://torch.kmtea.eu/whl/stable-cn.html
边栏推荐
猜你喜欢
An article was opened to test the real situation of outsourcing companies
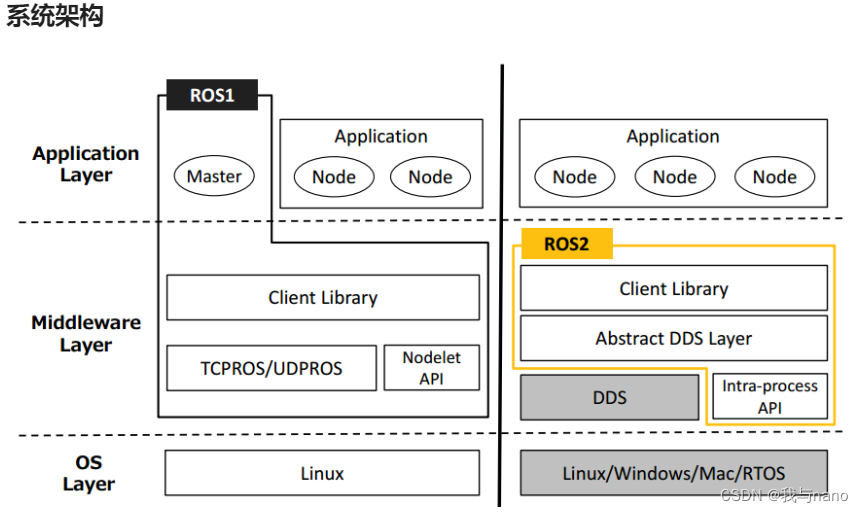
ROS2——ROS2对比ROS1(二)
IPage能正常显示数据,但是total一直等于0
![[vscode] prohibit the pylance plug-in from automatically adding import](/img/a7/d96c0c4739ff68356c15bafbbb1328.jpg)
[vscode] prohibit the pylance plug-in from automatically adding import
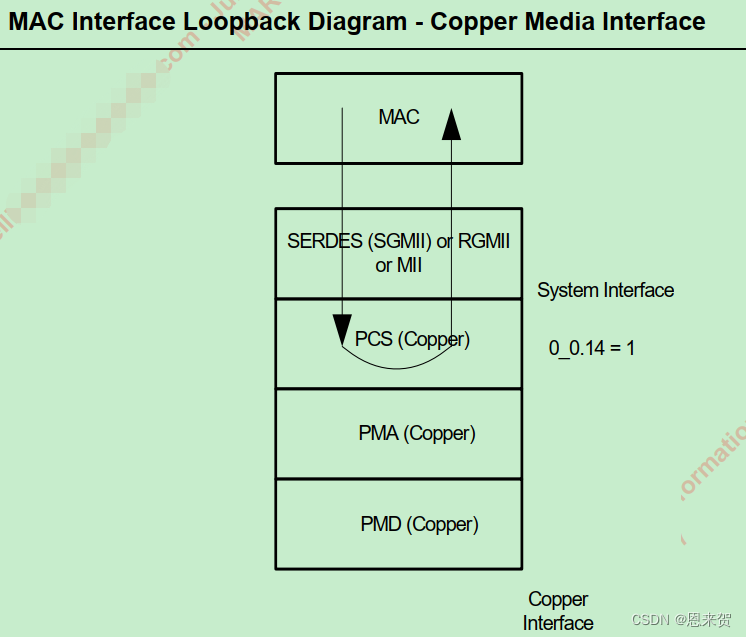
Marvell 88E1515 PHY loopback模式测试

ROS2——初识ROS2(一)
Ros2 - function package (VI)
M2DGR 多源多场景 地面机器人SLAM数据集
Ros2 - configuration development environment (V)

使用paping工具进行tcp端口连通性检测
随机推荐
Powermanagerservice (I) - initialization
An article was opened to test the real situation of outsourcing companies
乐鑫面试流程
Xavier CPU & GPU 高负载功耗测试
postmessage通信
【软件测试】04 -- 软件测试与软件开发
Anaconda navigator click open no response, can not start error prompt attributeerror: 'STR' object has no attribute 'get‘
[software testing] 02 -- software defect management
并发编程 — 死锁排查及处理
C#学习笔记
PHY驱动调试之 --- MDIO/MDC接口22号和45号条款(一)
[tf] Unknown: Failed to get convolution algorithm. This is probably because cuDNN failed to initial
一文揭开,测试外包公司的真实情况
Preemption of CFS scheduling
Ros2 - install ros2 (III)
ROS2——功能包(六)
[software testing] 06 -- basic process of software testing
全局变量和静态变量的初始化
. Net core stepping on the pit practice
Qt项目中的日志库log4qt使用