当前位置:网站首页>基于图像和激光的多模态点云融合与视觉定位
基于图像和激光的多模态点云融合与视觉定位
2022-07-07 16:52:00 【biyezuopinvip】
资源下载地址:https://download.csdn.net/download/sheziqiong/85941708
资源下载地址:https://download.csdn.net/download/sheziqiong/85941708
中文摘要
近年来,三维场景重建与定位是计算机视觉领域中重要的研究方向。随着自动驾驶技术与工业机器人技术的不断发展,对于场景重建精度与定位准确度的要求也不断提高。如何利用各种传感器采集到的数据,完成对场景的精确重建与定位,是非常有价值和应用前景的研究方向。
目前这一领域中存在着许多挑战:在重建方面,使用传统方法对大场景一次性建图会产生漂移误差,同时效率较低,而采用分区域重建的方法又依赖于准确的融合技术;在定位方面,由于光照环境的变化,定位时刻的环境细节特征与地图重建时刻存在差异,在匹配上存在难度;同时,基于传统单目相机的视觉定位的视场较小,有时无法捕捉到足够多的特征进行定位。这些挑战共同限制了建图的精确性与定位的鲁棒性。
针对以上挑战,本文提出了一种重建与定位流程:首先利用传感器数据,生成场景局部点云,然后对局部点云进行拼接融合,合成整体场景高精度点云,最后利用全景相机实现在场景中的定位。
本文主要的研究内容包括:
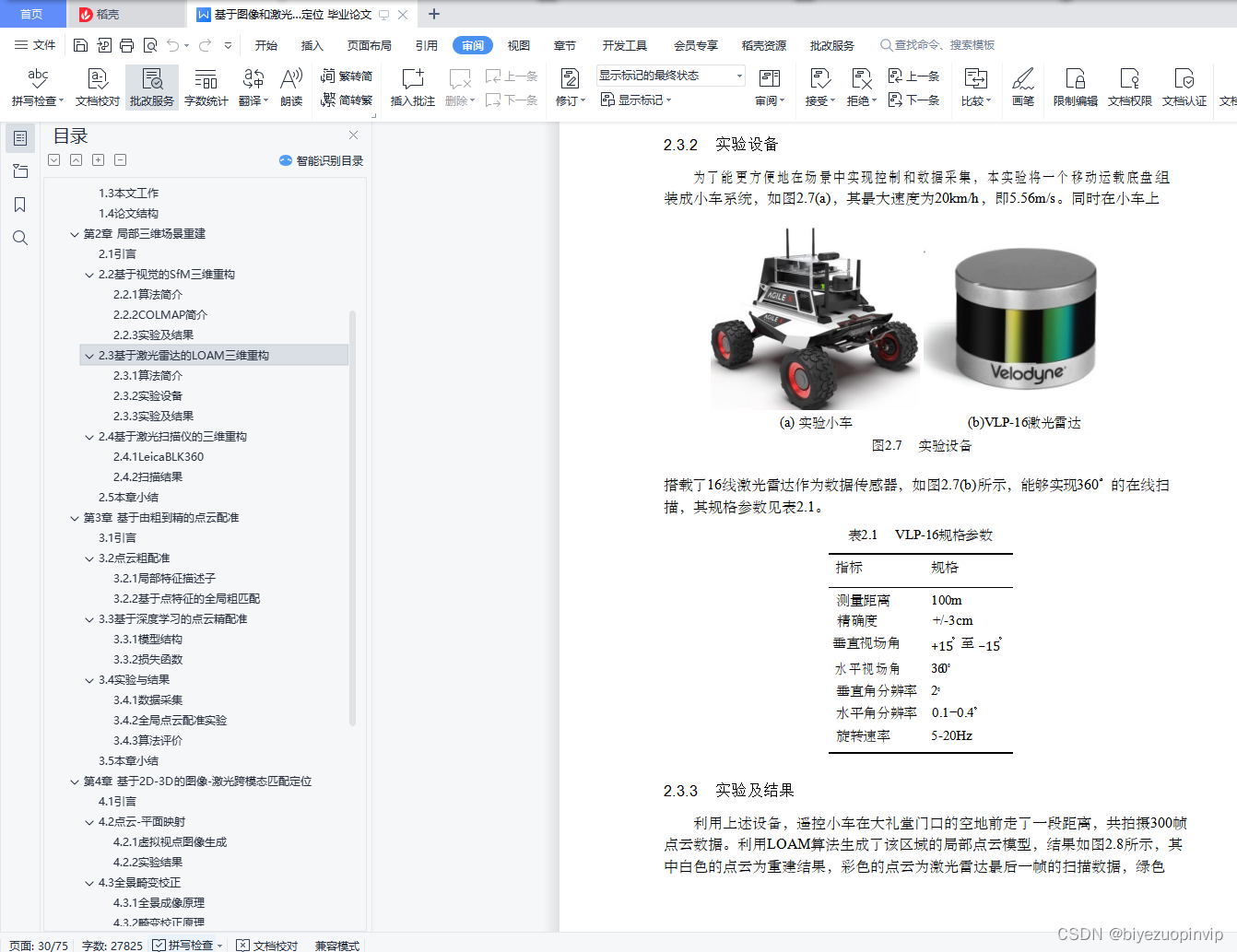
1.采用了三个平行的局部重建算法:基于视觉的SfM算法、基于激光雷达的LOAM算法与基于图像激光扫描仪的方法,完成对清华园局部场景的重建任务,为针对不同环境的重建任务在设备和算法选择上提供了参考;
2.提出一种由粗到精的点云配准算法,对局部场景点云进行融合,生成全局高精度点云。该算法融合了传统特征提取与神经网络的方法,能够在不依赖于初始转移矩阵的情况下具有较为鲁棒的配准结果。
3.提出一种跨模态鲁棒匹配的视觉定位算法,完成了基于先验点云场景中的定位任务。该算法通过将2D-3D匹配问题转换为2D-2D匹配问题,能够在仅使用全景相机,且不预先对场景进行任何布置的情况下实现定位。
关键词:三维重建;定位;点云配准;神经网络;高精度地图
ABSTRACT
Inrecentyears,3Dscenereconstructionandlocalizationisanimportantresearchdirectionincomputervisionfield.Withthecontinuousdevelopmentofautonomousdrivingtechnologyandindustrialrobottechnology,therequirementsfortheaccuracyofreconstructionandlocalizationarealsoincreasing.Therefore,howtousethedatacollectedbyvarioussensorstoaccuratelyreconstructthesceneandlocateinit,isaveryvaluableandpromisingresearchdirection.
Atpresent,therearemanychallengesinthisfield.Intheaspectofreconstruction,thetraditionalmethodwillproducedrifterrorandlowefficiencyinthereconstructionoflargesceneinonetime,whilethemethodofsubregionalreconstructionreliesonac-curatefusiontechnology.Intheaspectoflocalization,duetothechangeofilluminationenvironment,thedetailedfeaturesofthelocationtimearedifferentfromthoseofthemapreconstructiontime,soitisdifficulttomatchthem.Futhermore,thevisuallocal-izationtechonologybasedontraditionalmonocularcamerahasasmallfieldofview,sosometimesitcannotcaptureenoughfeaturesforlocalization.Thesechallengestogetherlimittheaccuracyofmappingandtherobustnessoflocalization.
Aimingattheabovechallenges,areconstructionandlocationprocessisproposedinthisthesis.Firstly,localpointcloudsaregeneratedfromsensordata,andthenthelocalpointcloudsaresplicedandfusedtosynthesizehigh-precisionpointcloudsofthewholescene.Finally,thepanoramiccameraisusedtorealizethelocationinthescene.
Themainresearchcontentsofthisthesisinclude:
1.Threeparallellocalreconstructionalgorithmsareadopted:visualbasedSFMalgorithm,lidarbasedLOAMalgorithmandimage-laserscannerbasedmethod,tocom-pletethereconstructiontaskofthelocalsceneofTsinghuaUniversity,whichprovidesareferencefortheselectionofequipmentandalgorithmforreconstructiontasksindif-ferentenvironments;
2.ACoarse-to-finepointcloudregistrationalgorithmisproposedtointegratethelocalpointcloudsandgeneratetheglobalhigh-precisionpointcloud.Thisalgorithmcombinesthetraditionalfeatureextractionandneuralnetworkmethods,andcanachieverobustregistrationresultswithoutrelyingontheinitialtransfermatrix.
3.Across-modalrobustmatchingvisionlocationalgorithmisproposedtoaccom-plishthelocationtaskbasedonaprioripointcloudscene.Bytransformingthe2D-3Dmatchingproblemintoa2D-2Dmatchingproblem,thealgorithmcanrealizepositioningusingonlythepanoramiccameraandwithoutanylayoutofthesceneinadvance.
Keywords:3Dreconstruction;localization;pointcloudregistration;neuralnet-work;highprecisionmap
目 录
第1章 引言 1
1.1研究背景及意义 1
1.2研究现状 3
1.2.1视觉三维重构 3
1.2.2点云配准 8
1.2.3图像特征描述 12
1.2.4视觉定位 14
1.3本文工作 15
1.4论文结构 17
第2章 局部三维场景重建 18
2.1 引言 18
2.2基于视觉的SfM三维重构 18
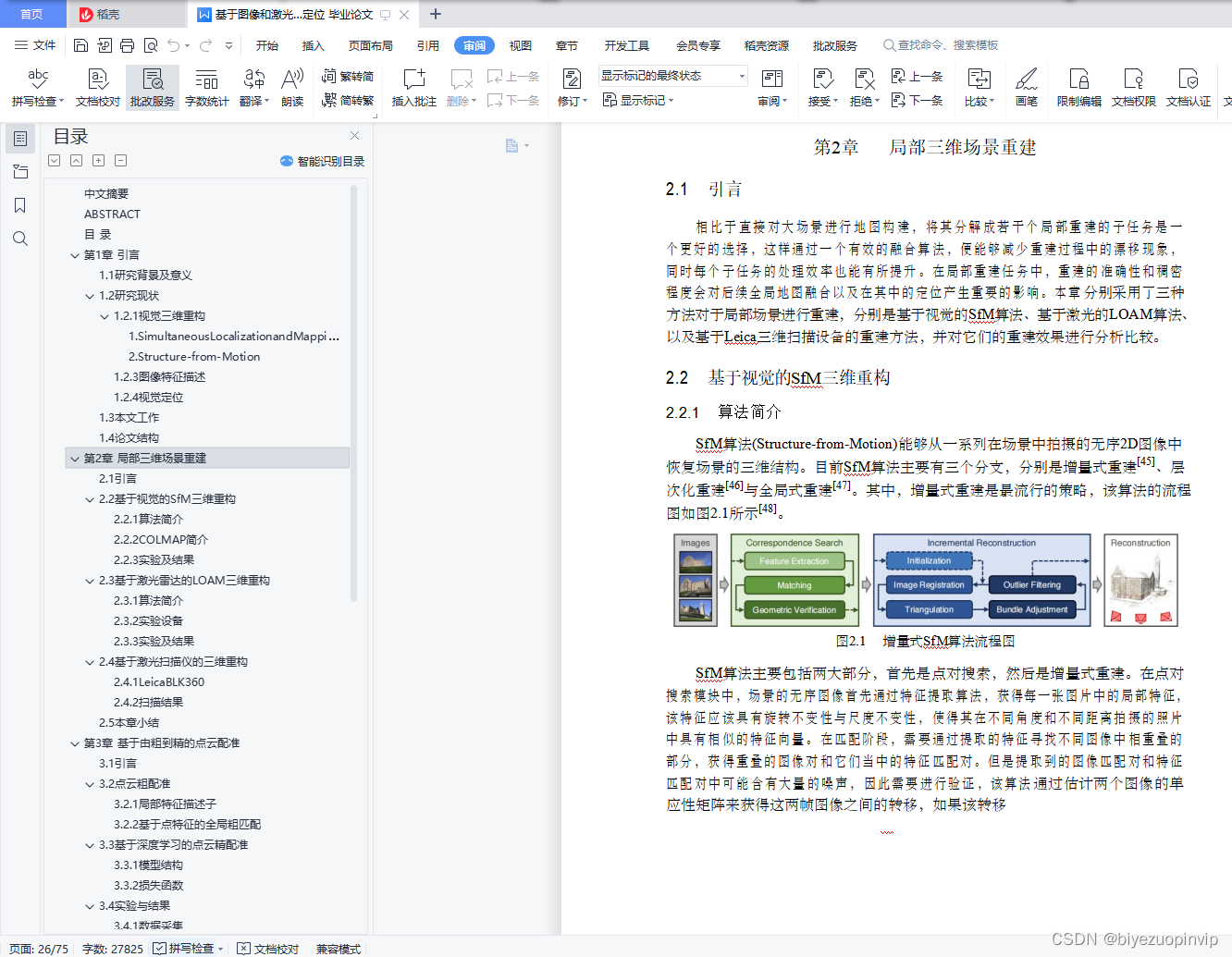
2.2.1算法简介 18
2.2.2COLMAP简介 19
2.2.3实验及结果 20
2.3基于激光雷达的LOAM三维重构 21
2.3.1算法简介 21
2.3.2实验设备 22
2.3.3实验及结果 22
2.4基于激光扫描仪的三维重构 23
2.4.1LeicaBLK360 23
2.4.2扫描结果 24
2.5本章小结 25
第3章 基于由粗到精的点云配准 26
3.1 引言 26
3.2点云粗配准 26
3.2.1局部特征描述子 26
3.2.2基于点特征的全局粗匹配 28
3.3基于深度学习的点云精配准 30
3.3.1模型结构 31
3.3.2损失函数 32
3.4实验与结果 33
3.4.1数据采集 33
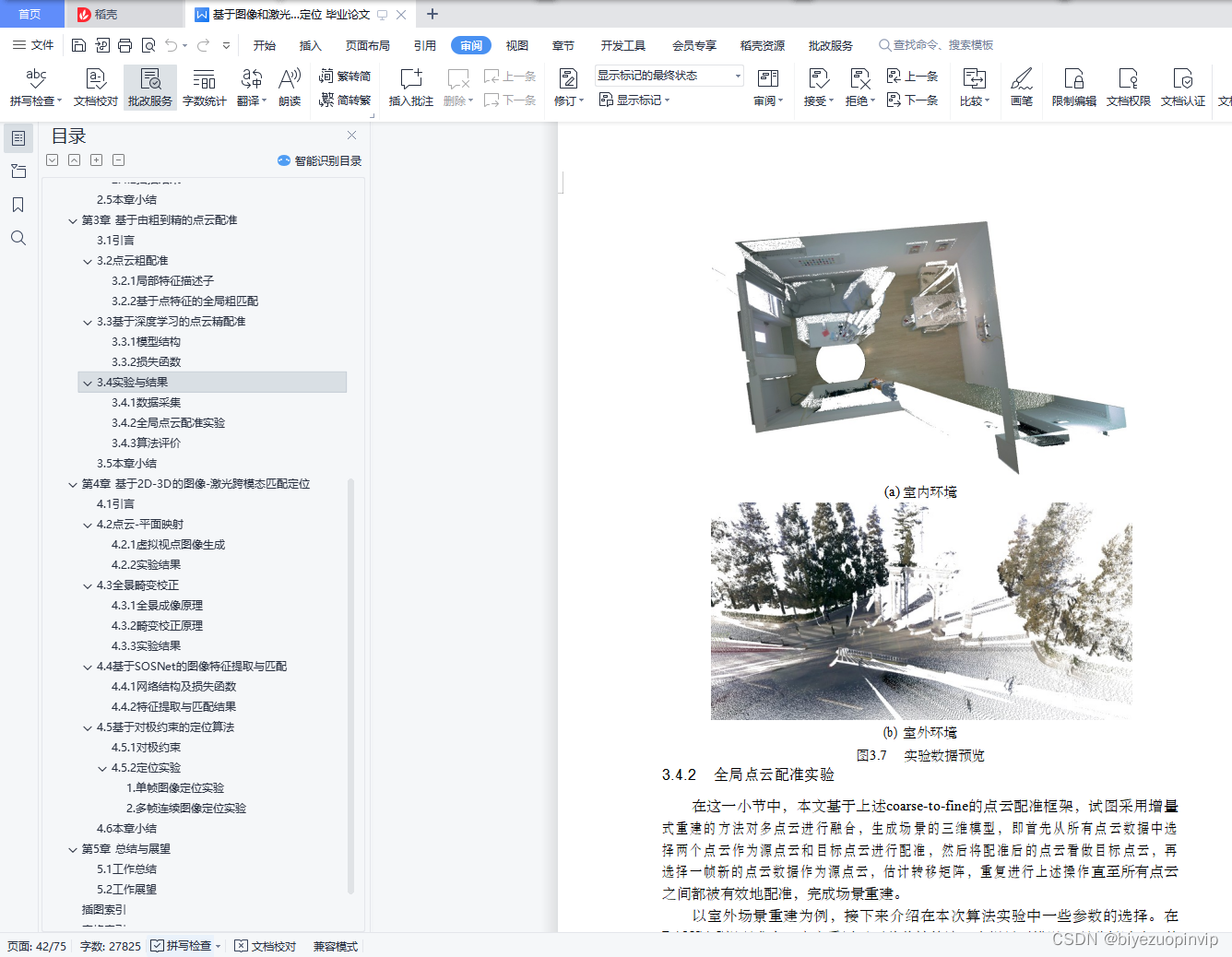
3.4.2全局点云配准实验 34
3.4.3算法评价 35
3.5本章小结 40
第4章 基于2D-3D的图像-激光跨模态匹配定位 42
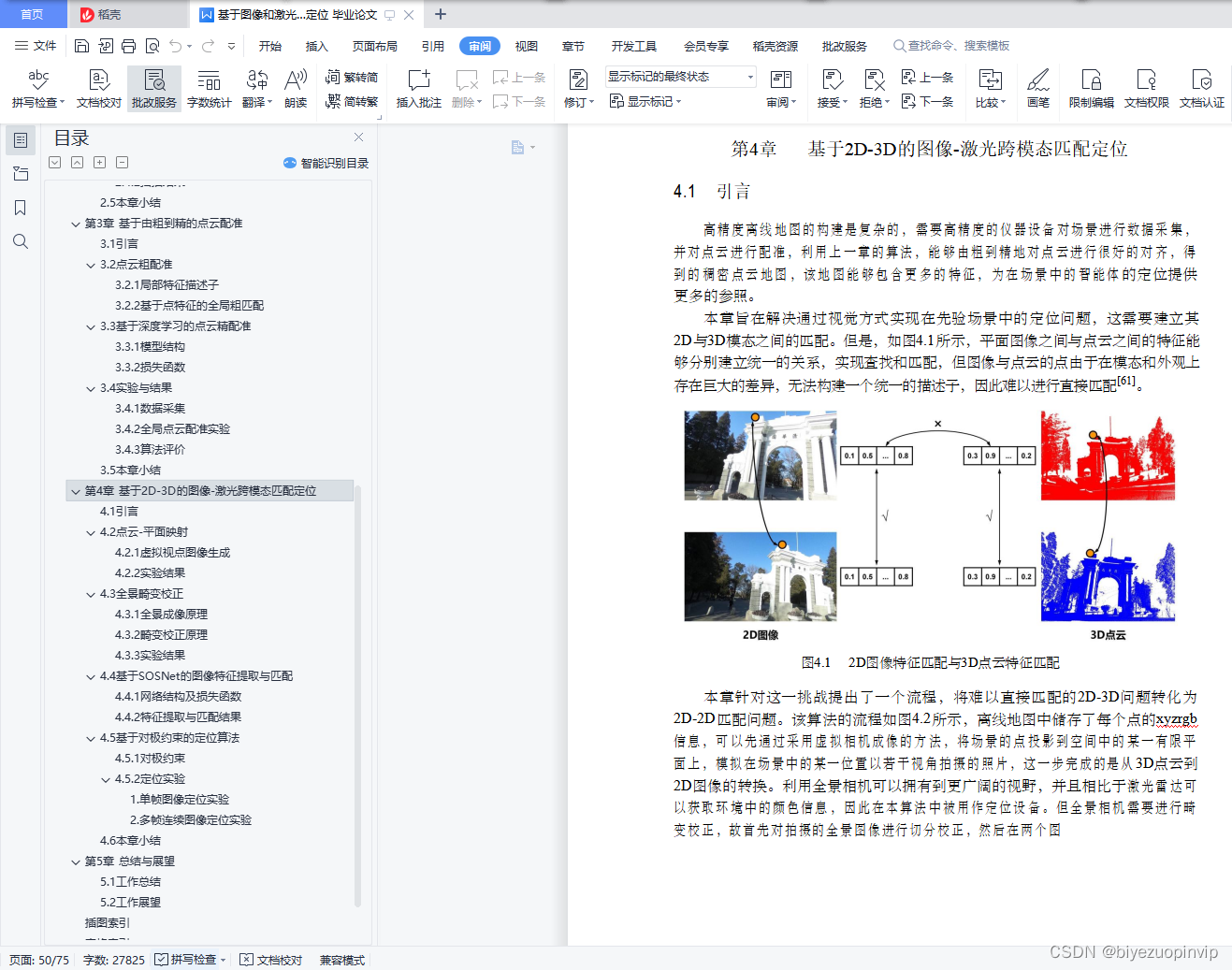
4.1 引言 42
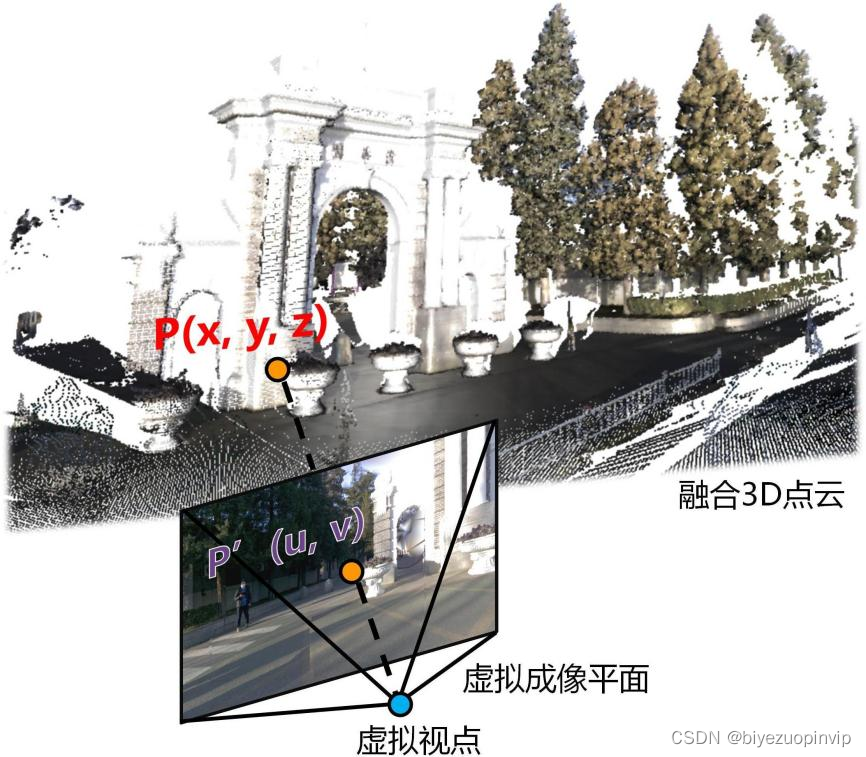
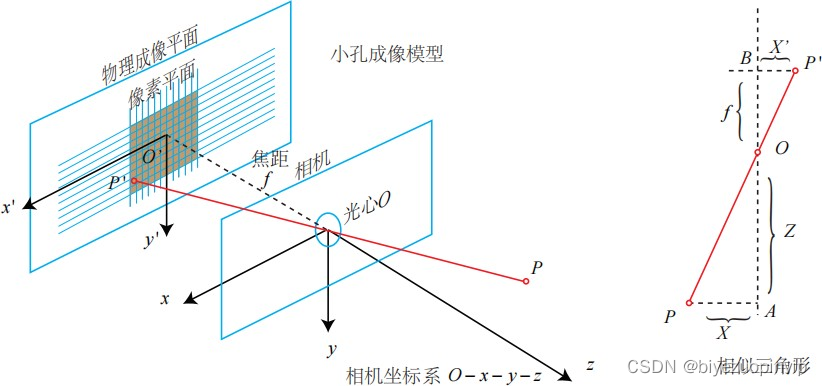
4.2点云-平面映射 43
4.2.1虚拟视点图像生成 43
4.2.2实验结果 45
4.3全景畸变校正 46
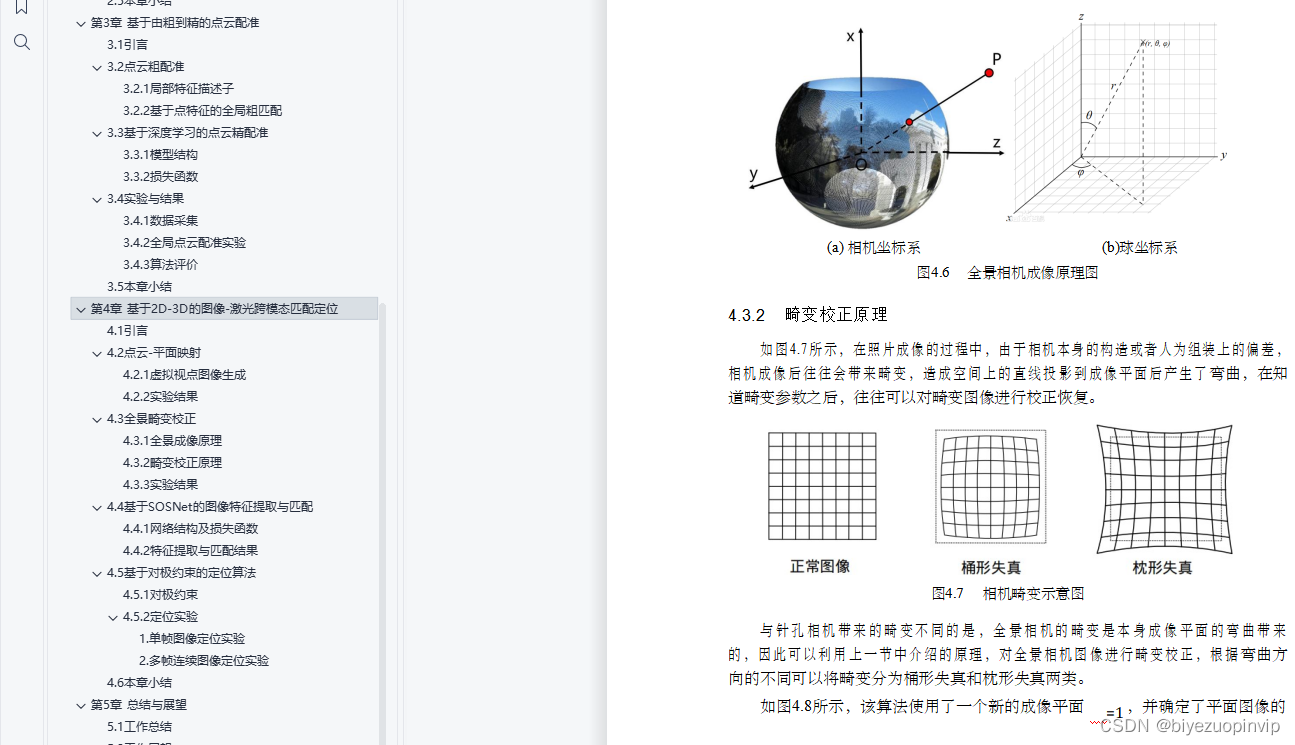
4.3.1全景成像原理 46
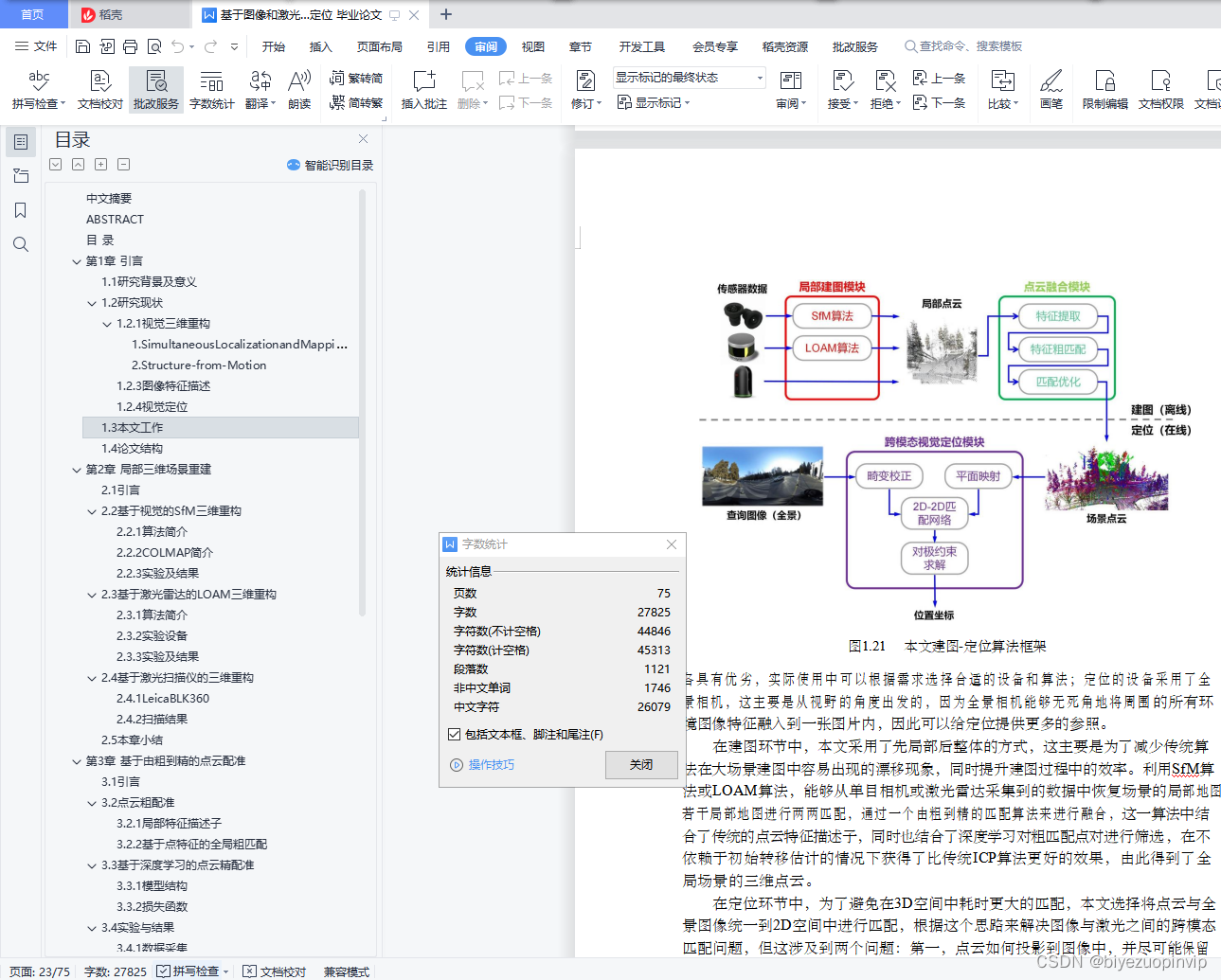
4.3.2畸变校正原理 47
4.3.3实验结果 48
4.4基于SOSNet的图像特征提取与匹配 49
4.4.1网络结构及损失函数 50
4.4.2特征提取与匹配结果 51
4.5基于对极约束的定位算法 53
4.5.1对极约束 53
4.5.2定位实验 54
4.6本章小结 55
第5章 总结与展望 57
5.1工作总结 57
5.2工作展望 58
插图索引 59
表格索引 61
参考文献 62
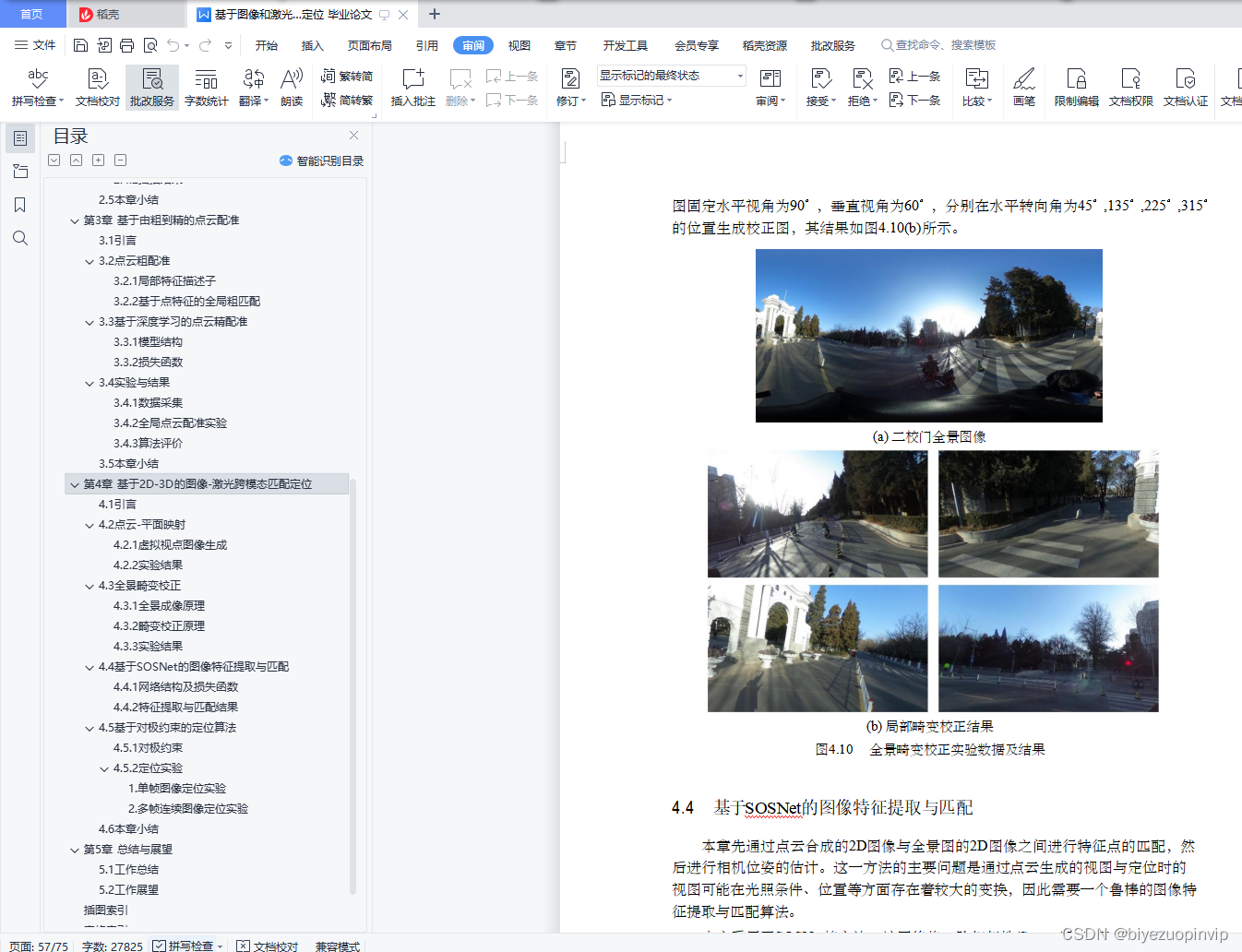
在建图环节中,本文采用了先局部后整体的方式,这主要是为了减少传统算法在大场景建图中容易出现的漂移现象,同时提升建图过程中的效率。利用SfM算法或LOAM算法,能够从单目相机或激光雷达采集到的数据中恢复场景的局部地图。若干局部地图进行两两匹配,通过一个由粗到精的匹配算法来进行融合,这一算法中结合了传统的点云特征描述子,同时也结合了深度学习对粗匹配点对进行筛选,在不依赖于初始转移估计的情况下获得了比传统ICP算法更好的效果,由此得到了全局场景的三维点云。
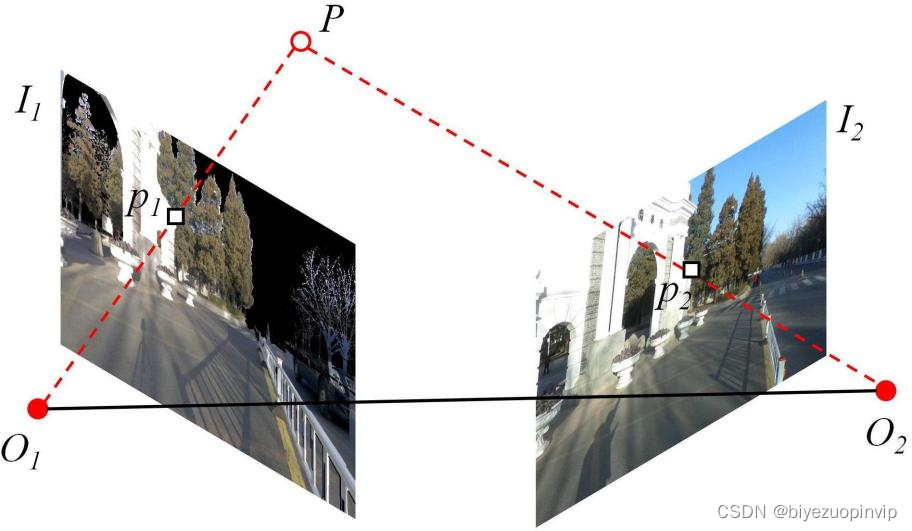
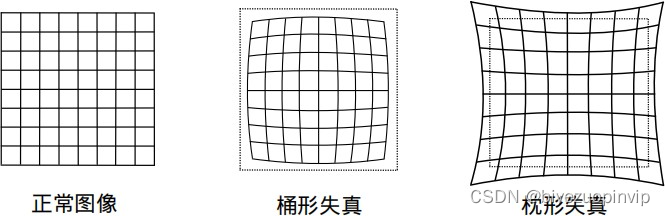
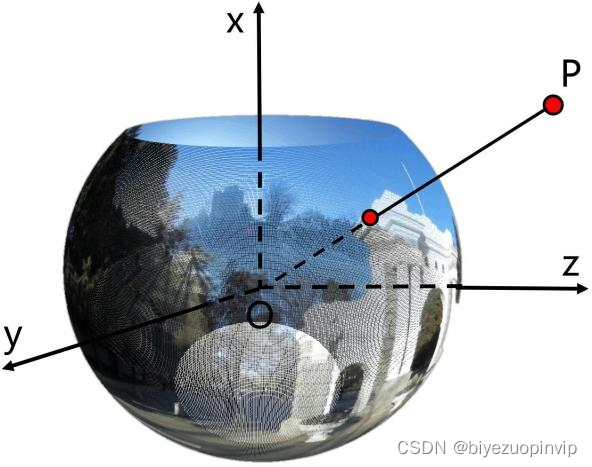
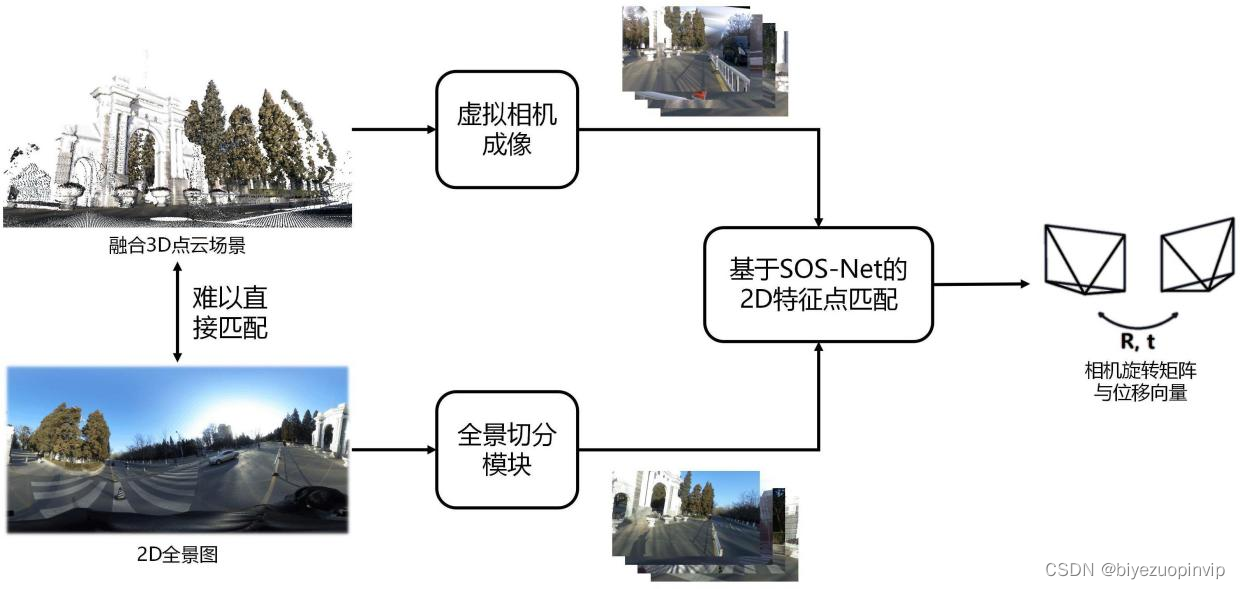
在定位环节中,为了避免在3D空间中耗时更大的匹配,本文选择将点云与全景图像统一到2D空间中进行匹配,根据这个思路来解决图像与激光之间的跨模态匹配问题,但这涉及到两个问题:第一,点云如何投影到图像中,并尽可能保留更多的特征;第二,全景图像带来更广阔视野的同时也会带来较大的畸变,对特征描述造成影响。针对这两个问题,本文分别设计了点云平面映射与全景畸变校正两个模块。同时,对于建图与定位环境光照条件变化的挑战,本文采用了
深度学习进行描述符学习,取得了比传统特征匹配方法更鲁棒的结果。最后通过对极约束求解出查询图像在场景中的位置坐标。
1.4论文结构
本文主要由5个章节构成,主要内容如下:
1.第1章介绍了三维重建与定位技术的背景与内容,分析了此领域研究的意义与难点。同时对近年来SLAM技术和点云融合算法进行了简要介绍。
2.第2章介绍了本文采用的局部三维重建方法,并完成了利用SfM、LOAM以及图像激光扫描仪对大礼堂场景的局部重建实验,并进行了对比。
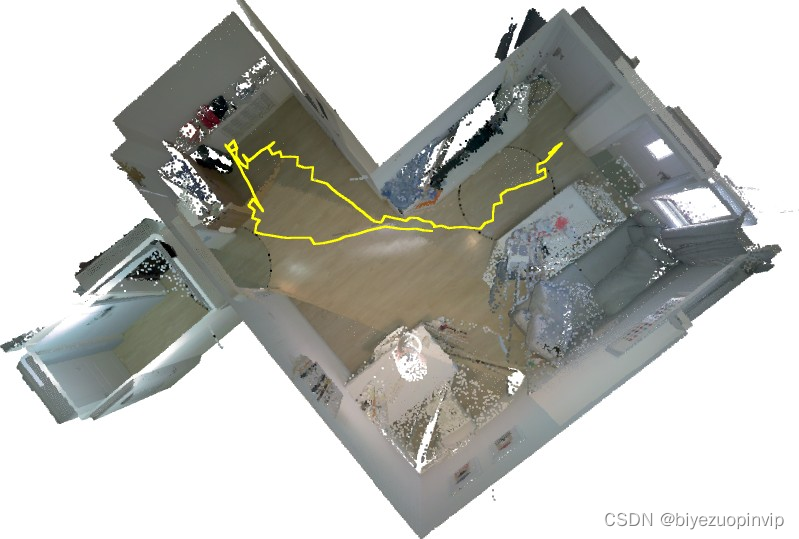
3.第3章介绍了本文提出的一种由粗到精的点云配准流程,能够融合局部点云生成场景全局点云地图,并分别在室内外自己采集的数据上进行了实验与分析。
4.第4章介绍了一种视觉定位方法,能够利用先验点云地图进行绝对位置的确定,并通过实验证明了该方法的可行性。
5.第5章对本研究的成果进行了总结,并提出了对未来可能的改进方向进行了展望。

资源下载地址:https://download.csdn.net/download/sheziqiong/85941708
资源下载地址:https://download.csdn.net/download/sheziqiong/85941708
边栏推荐
- DeSci:去中心化科学是Web3.0的新趋势?
- PHP面试题 foreach($arr as &$value)与foreach($arr as $value)的用法
- [sword finger offer] 59 - I. maximum value of sliding window
- 3.关于cookie
- Comparison and selection of kubernetes Devops CD Tools
- 清华、剑桥、UIC联合推出首个中文事实核查数据集:基于证据、涵盖医疗社会等多个领域
- idea彻底卸载安装及配置笔记
- Wechat web debugging 8.0.19 replace the X5 kernel with xweb, so the X5 debugging method can no longer be used. Now there is a solution
- Improve application security through nonce field of play integrity API
- App capture of charles+postern
猜你喜欢

随机推荐
Nat address translation
我感觉被骗了,微信内测 “大小号” 功能,同一手机号可注册两个微信
小试牛刀之NunJucks模板引擎
Basic operation of chain binary tree (implemented in C language)
Usage of PHP interview questions foreach ($arr as $value) and foreach ($arr as $value)
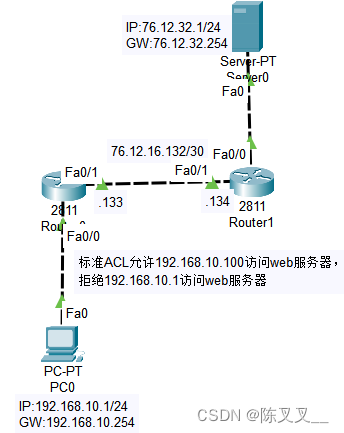
标准ACL与扩展ACL
Reinforcement learning - learning notes 8 | Q-learning
unity2d的Rigidbody2D的MovePosition函数移动时人物或屏幕抖动问题解决
Thread factory in thread pool
nest.js入门之 database
socket编程之常用api介绍与socket、select、poll、epoll高并发服务器模型代码实现
Redis publishing and subscription
Learn to make dynamic line chart in 3 minutes!
PTA 1102 教超冠军卷
『HarmonyOS』DevEco的下载安装与开发环境搭建
Tips for short-term operation of spot silver that cannot be ignored
清华、剑桥、UIC联合推出首个中文事实核查数据集:基于证据、涵盖医疗社会等多个领域
Redis
Introduction of common API for socket programming and code implementation of socket, select, poll, epoll high concurrency server model
2022-07-04 matlab读取视频帧并保存