当前位置:网站首页>CADD课程学习(5)-- 构建靶点已知的化合结构(ChemDraw)
CADD课程学习(5)-- 构建靶点已知的化合结构(ChemDraw)
2022-07-05 07:18:00 【发呆的比目鱼】
CADD课程学习(5)-- 构建靶点已知的化合结构(ChemDraw)
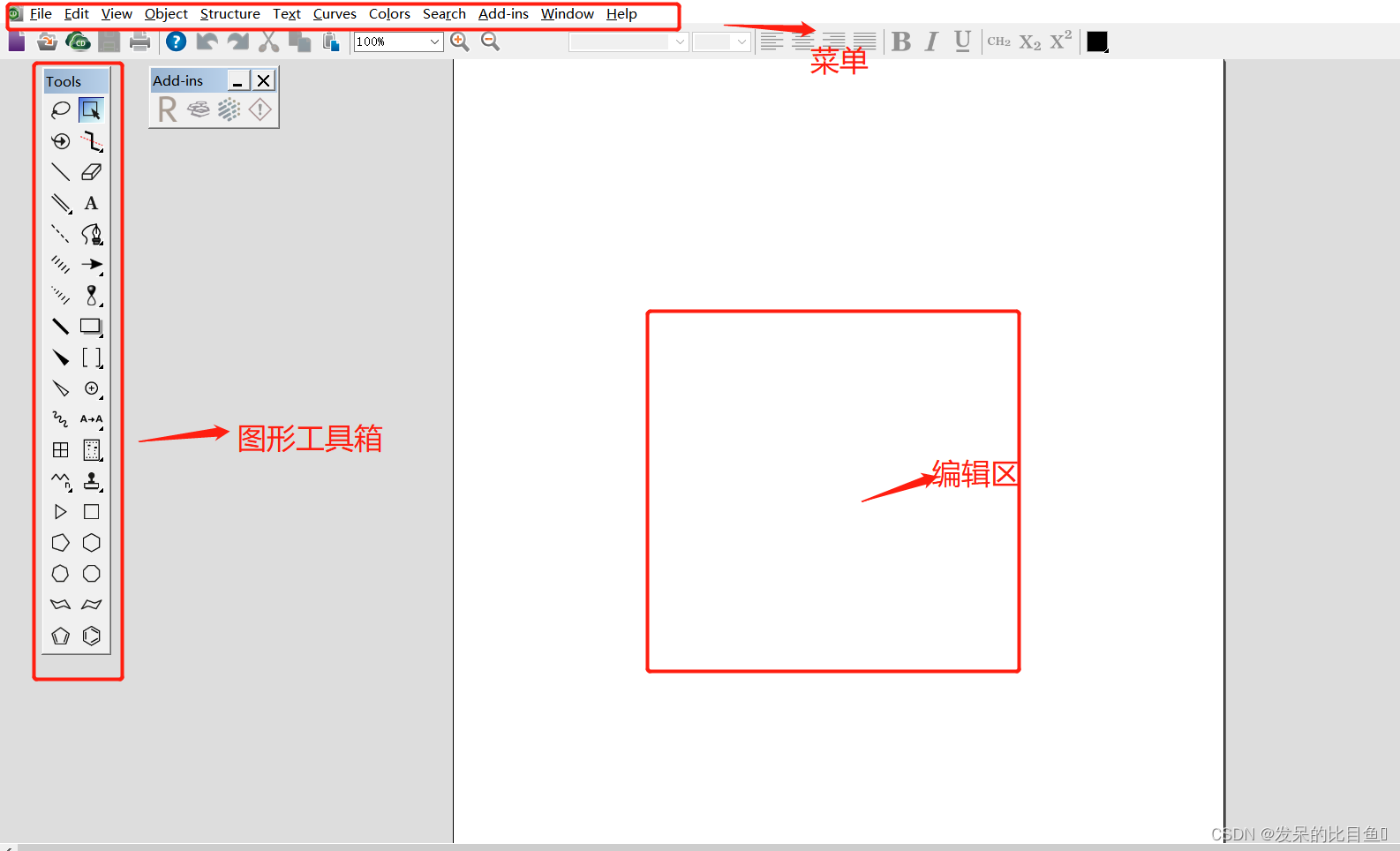
软件介绍
小分子结构构建
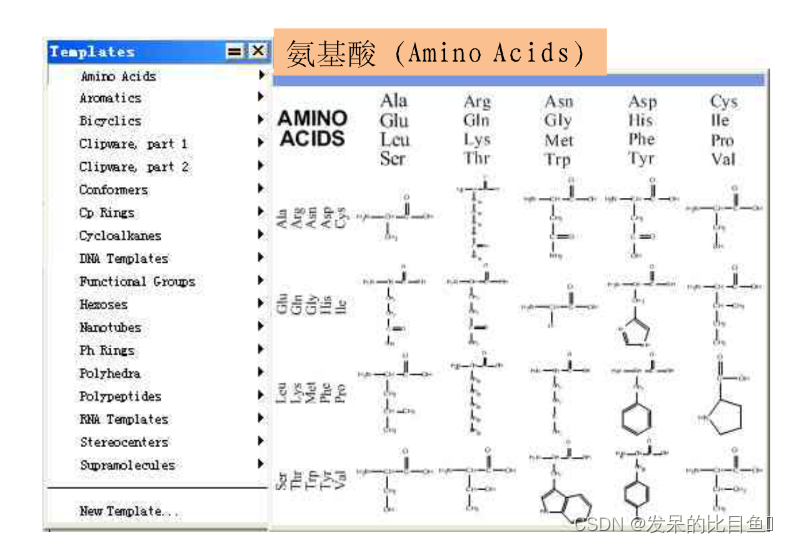
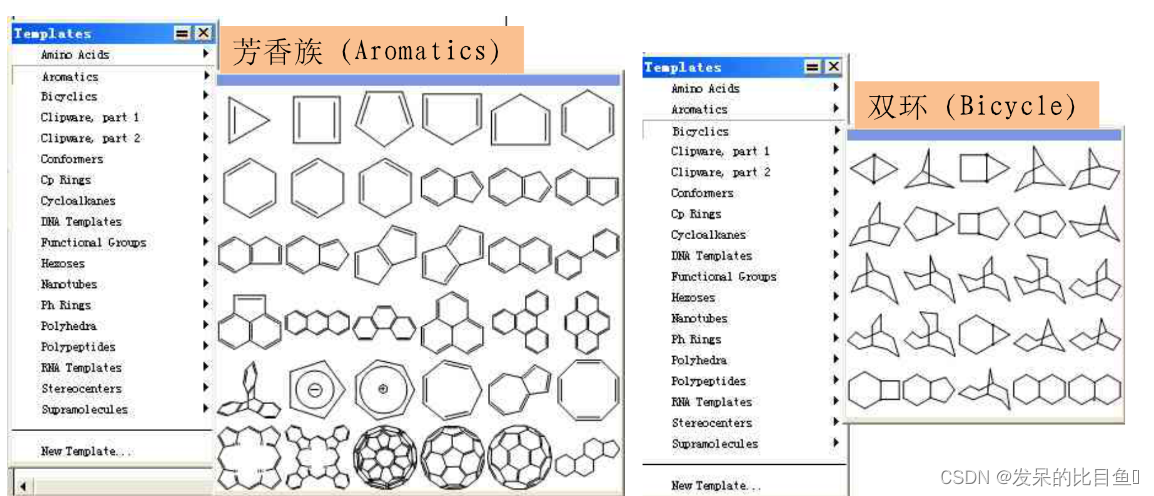
基本工具介绍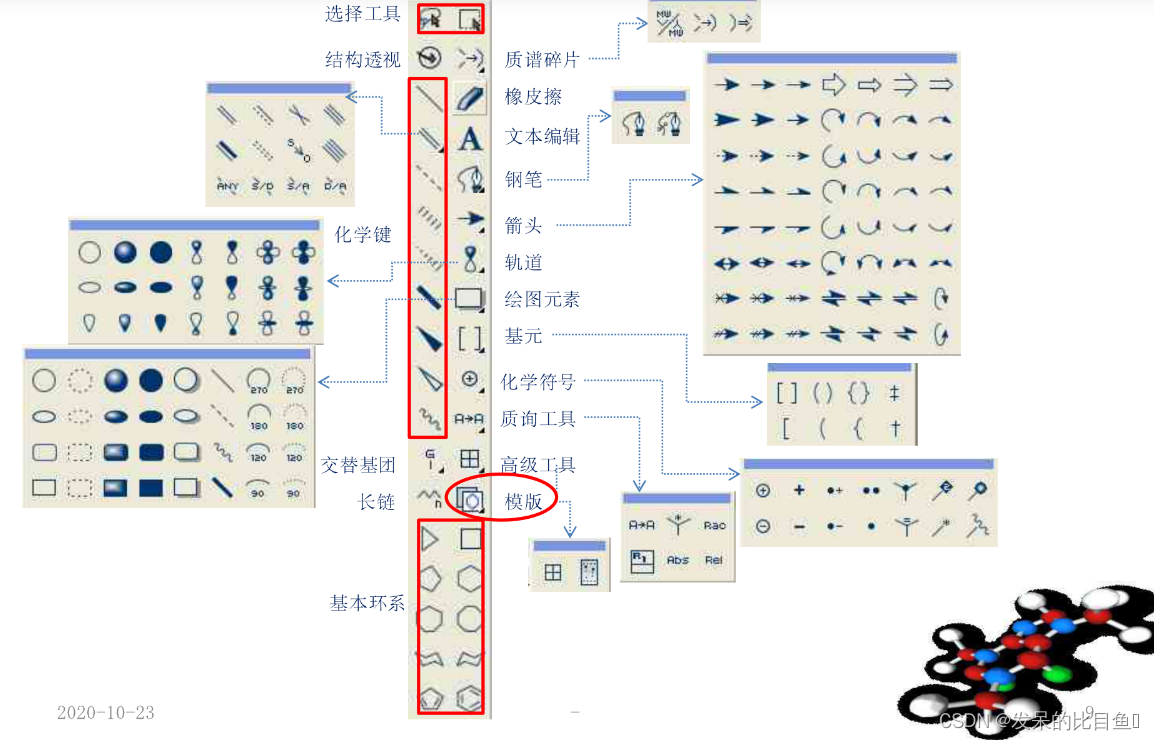
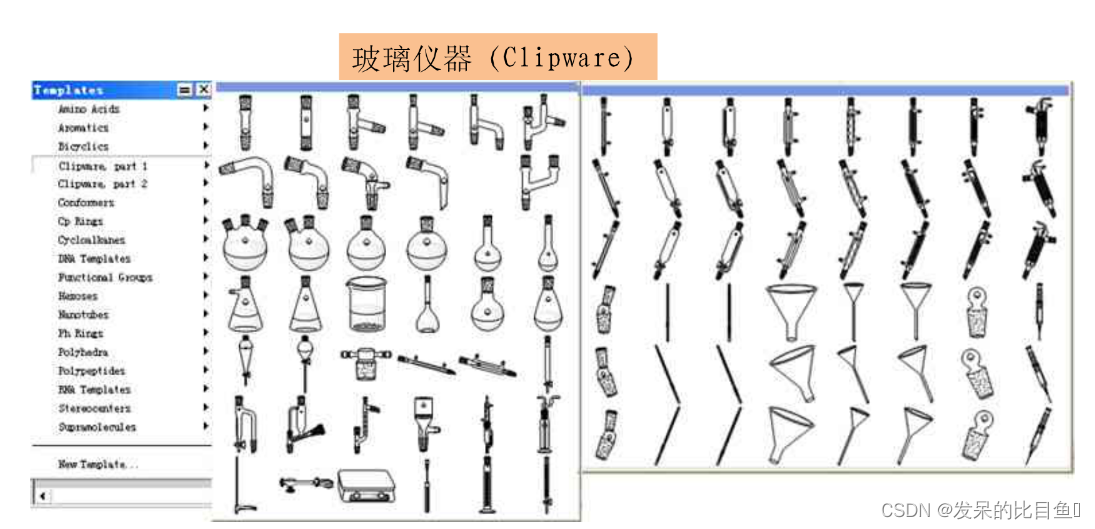
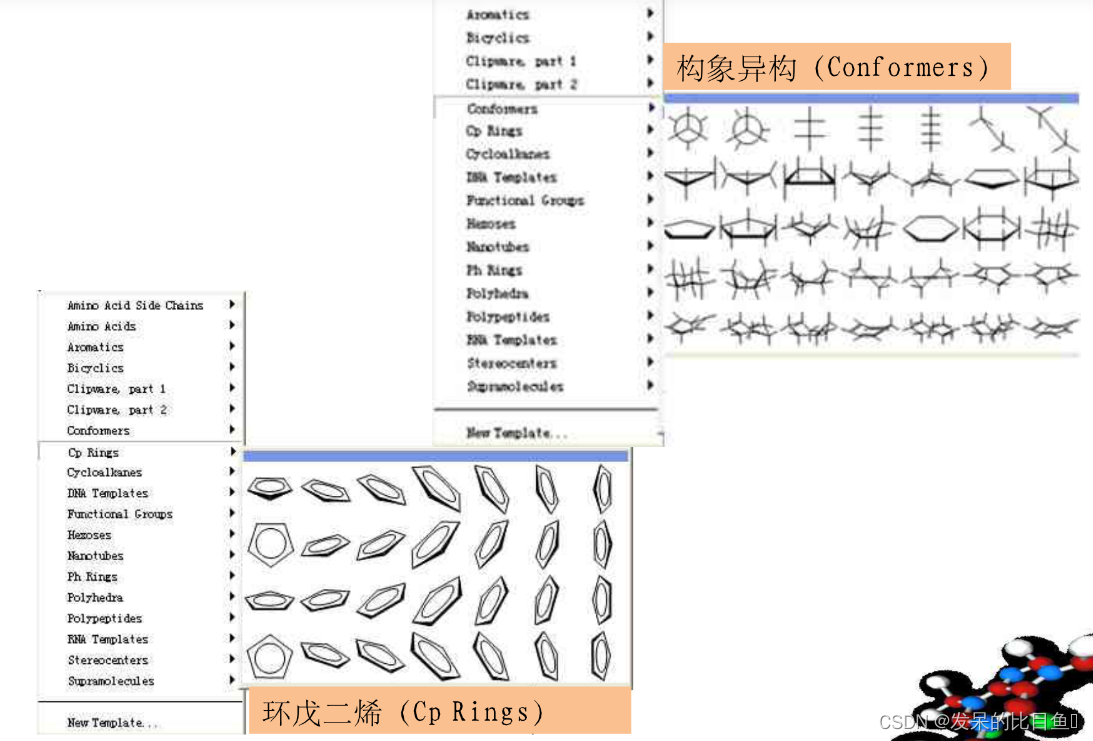
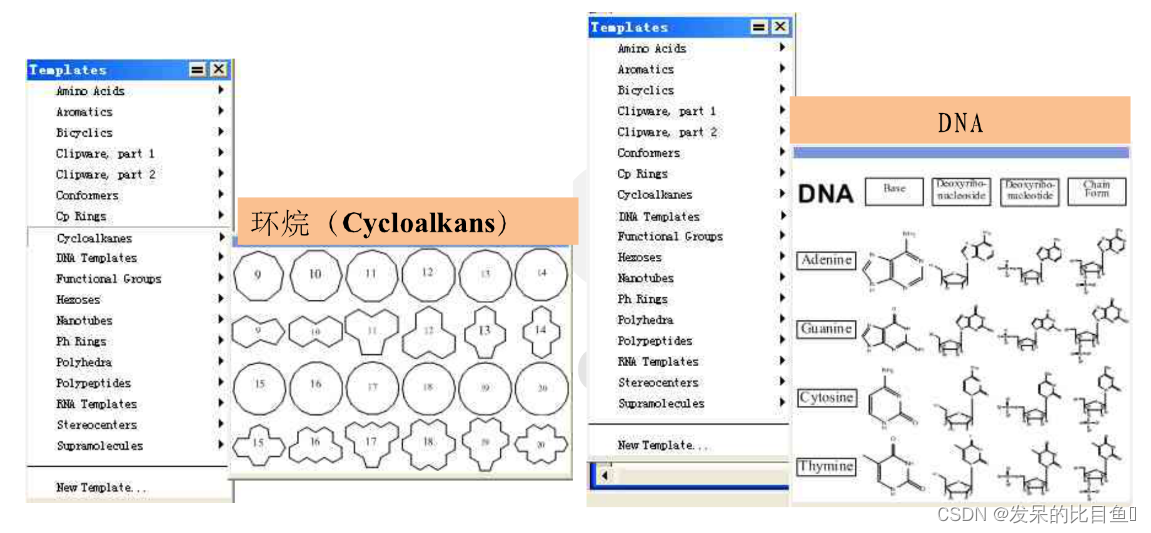
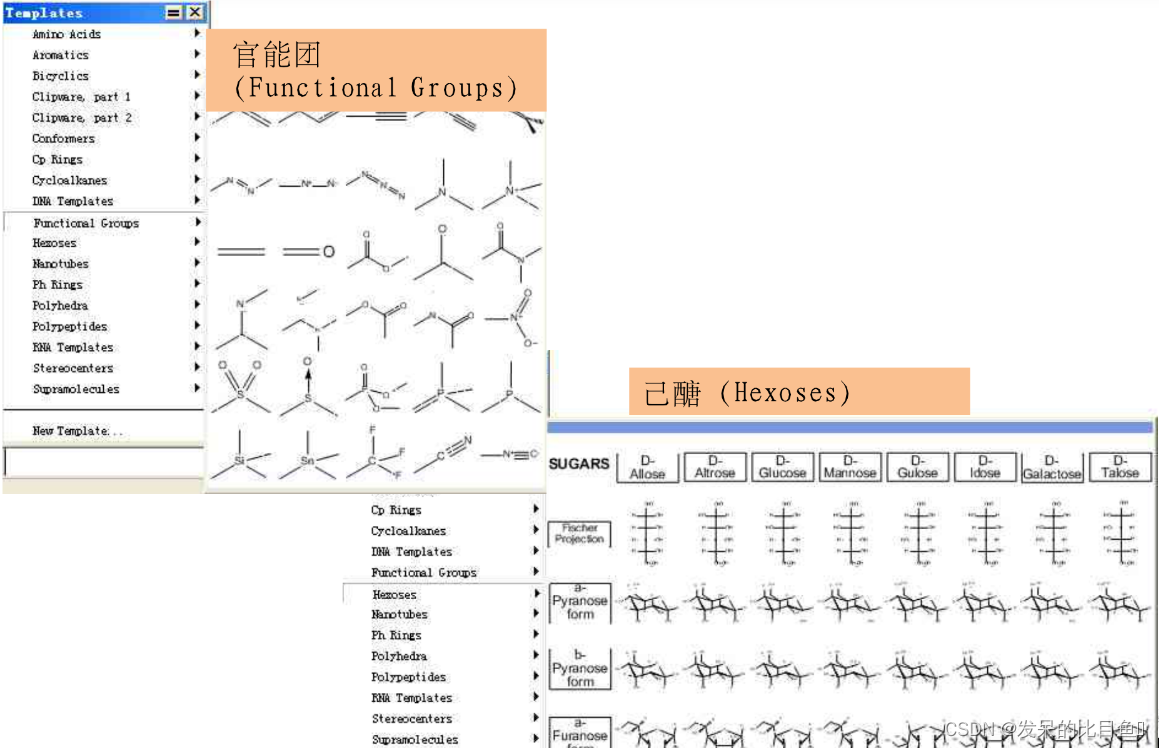
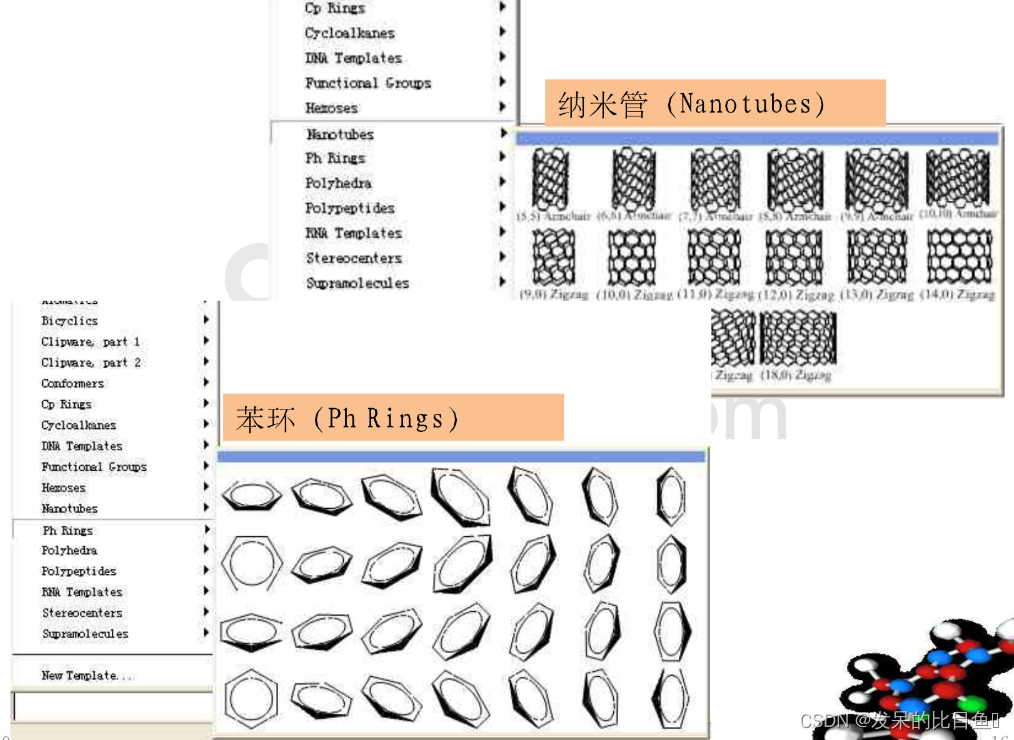
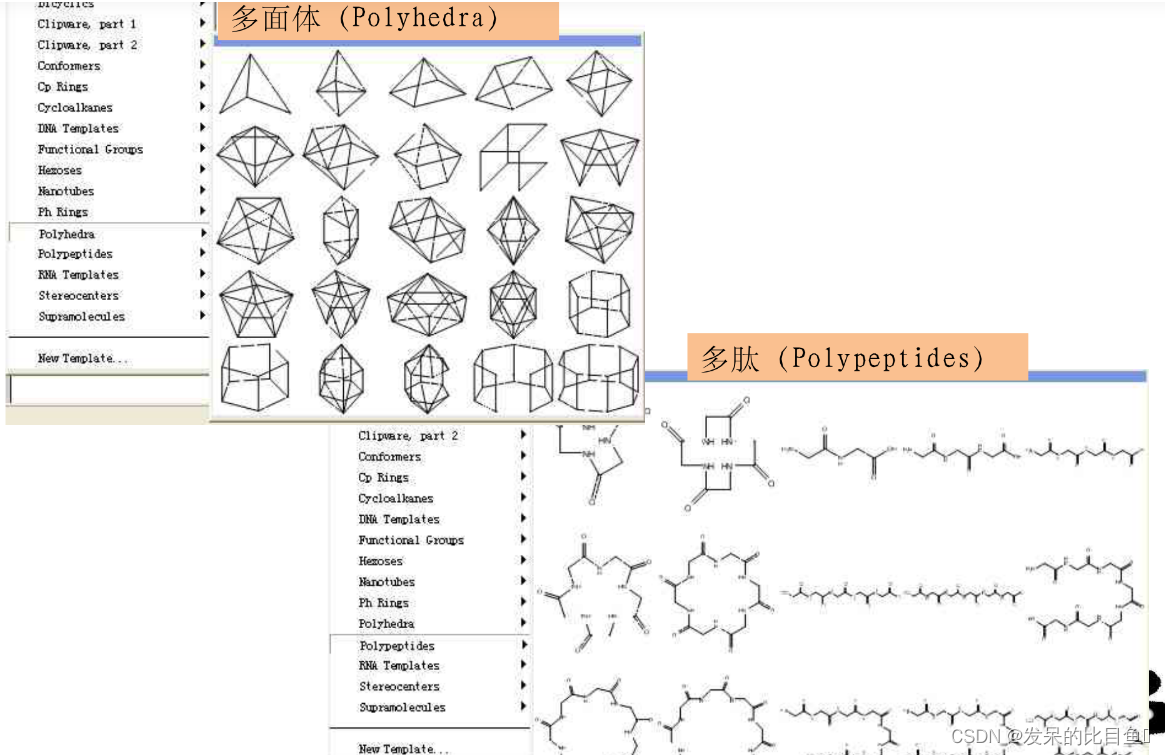
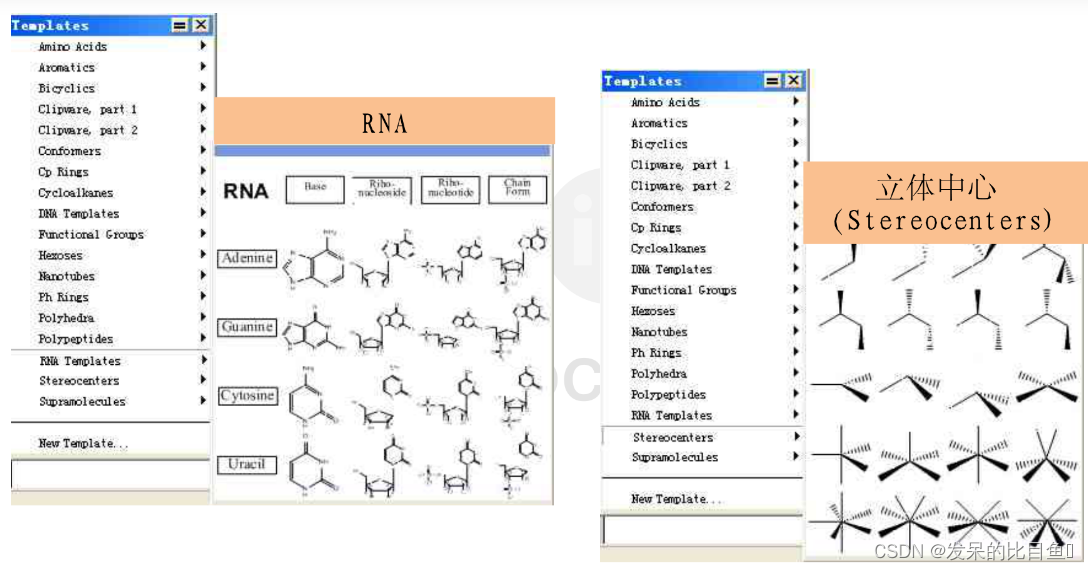
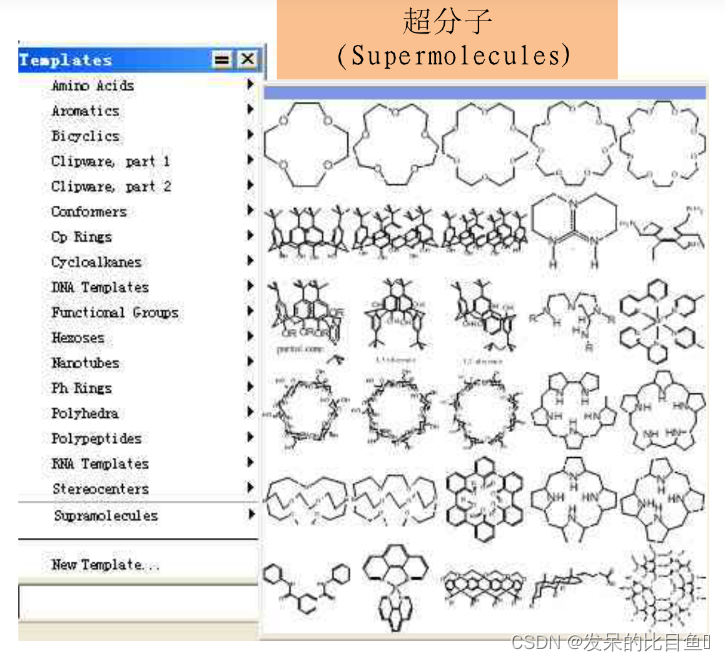
小分子结构构建
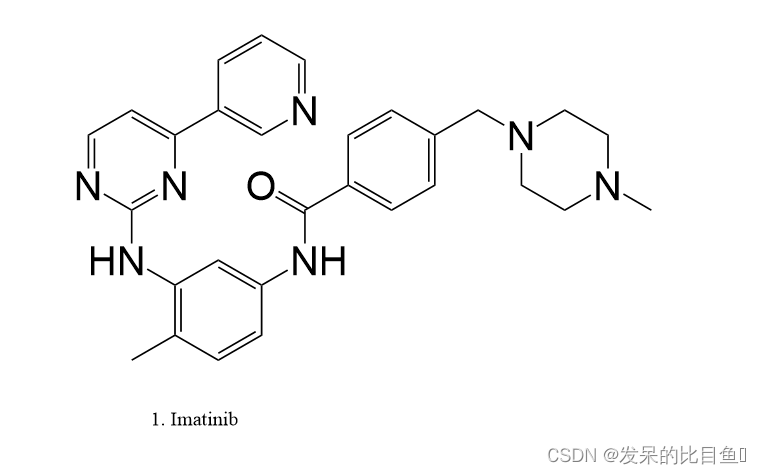
以化合物Imatinib为例构建小分子结构,先绘制分子骨架,再补充原子标签
保存
保存:File-Save或点击工具栏上将文件保存为常用的.cdx格式或.sdf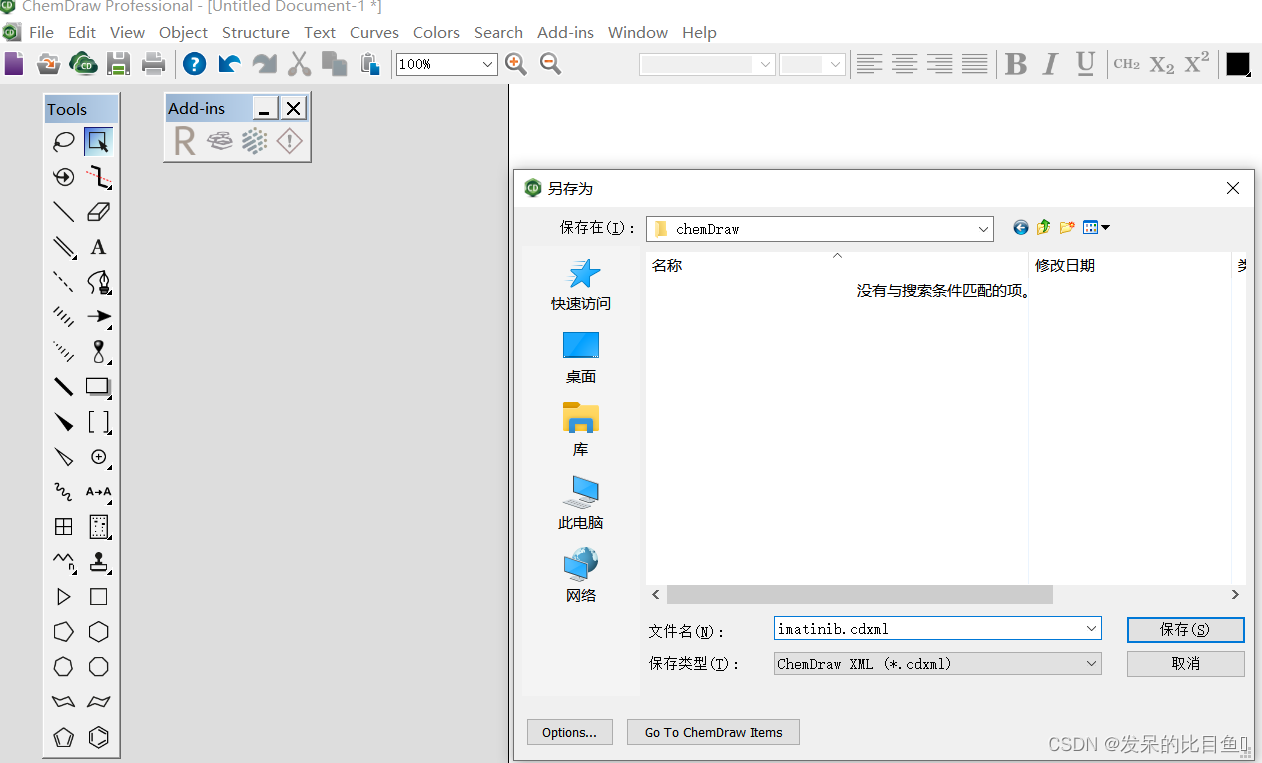
小分子理化性质计算
View-Show Chemical Properties Window 打开Chemical Properties窗口,选中分子,点击Paste即可计算出该分子的理化性质;Structure–Convert Structure to Name/Convert Name to Structure 可进行名称与结构的相互转换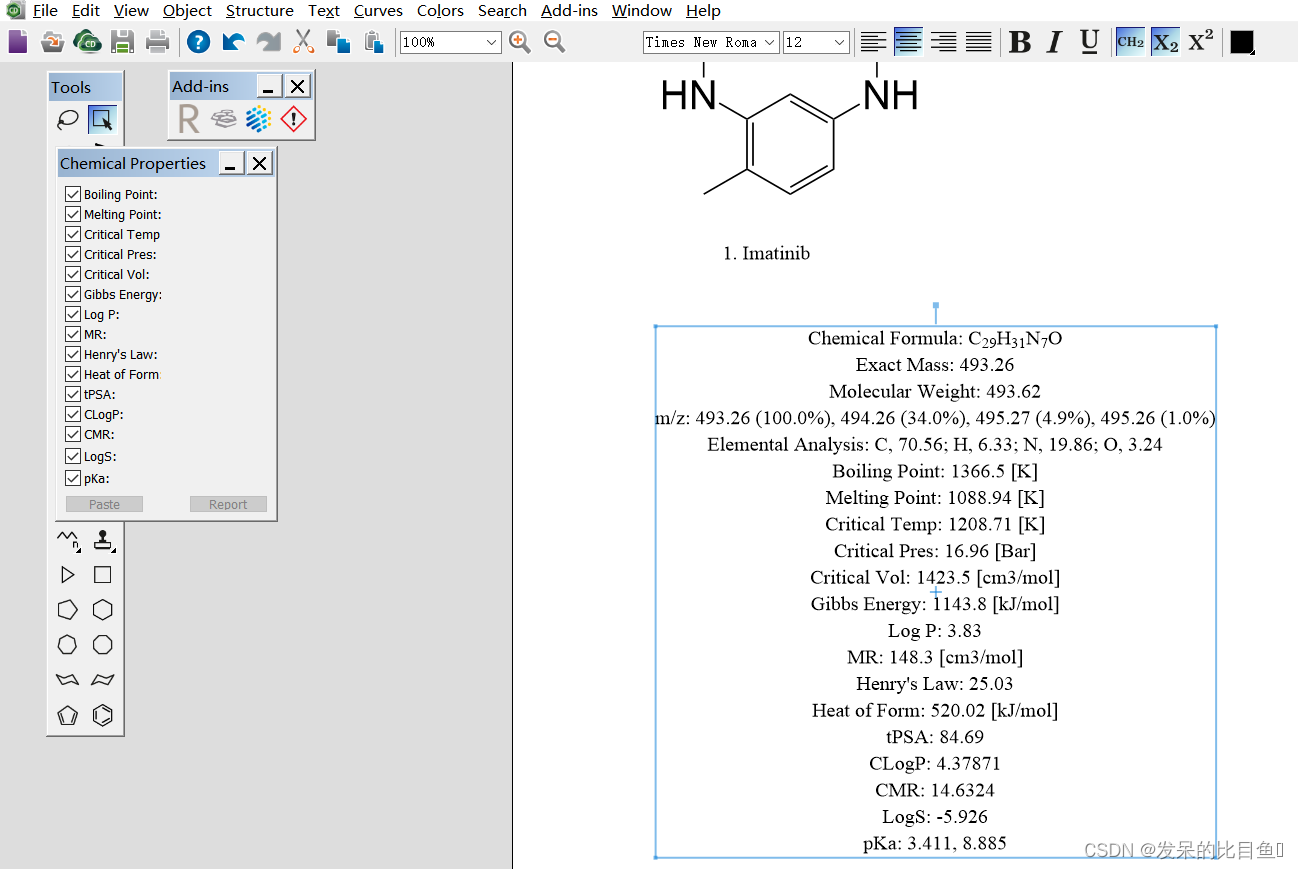
简介:logSw代表的是小分子化合物的水溶性指标。
logsw越小表示化合物的水溶性越低,越大代表化合物的水溶性越高。
logSw<-8表示化合物的水溶性极低。
8<logSw<-6表示化合物的水溶性非常低。
-6<logSw<-4表示化合物的水溶性低。
4<logSw<-2表示化合物的水溶性好。
2<logSw<0表示化合物的水溶性最佳。
logSw>0表示化合物的水溶性过高。
logP简介:logP是油水分配系数,是物质在正辛醇和水中的分配系数比值的对数值。
logP反映了物质在油水两相中的分配情况。logP值越大,说明该物质越亲水,即水溶性越好。
边栏推荐
- The difference between NPM install -g/-save/-save-dev
- [OBS] x264 Code: "buffer_size“
- 【obs】x264编码:“buffer_size“
- Today, share the wonderful and beautiful theme of idea + website address
- 【无标题】
- Ggplot2 drawing learning notes in R
- Now there are HTML files and MVC made with vs (connected to the database). How can they be connected?
- ImportError: No module named ‘Tkinter‘
- What is sodium hydroxide?
- 【Node】npm、yarn、pnpm 区别
猜你喜欢
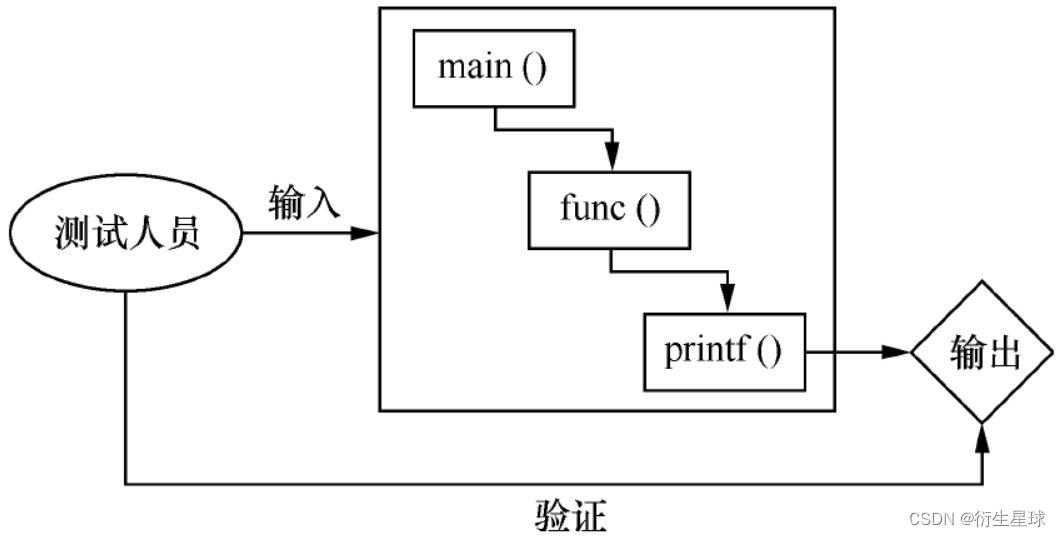
![[software testing] 06 -- basic process of software testing](/img/fe/3d8b9b68f95ac7899ab87d6993284d.jpg)
[software testing] 06 -- basic process of software testing

Word import literature -mendeley
Chapter 2: try to implement a simple bean container
【软件测试】03 -- 软件测试概述
![[node] NVM version management tool](/img/26/f13a2451c2f177a86bcb2920936468.png)
[node] NVM version management tool
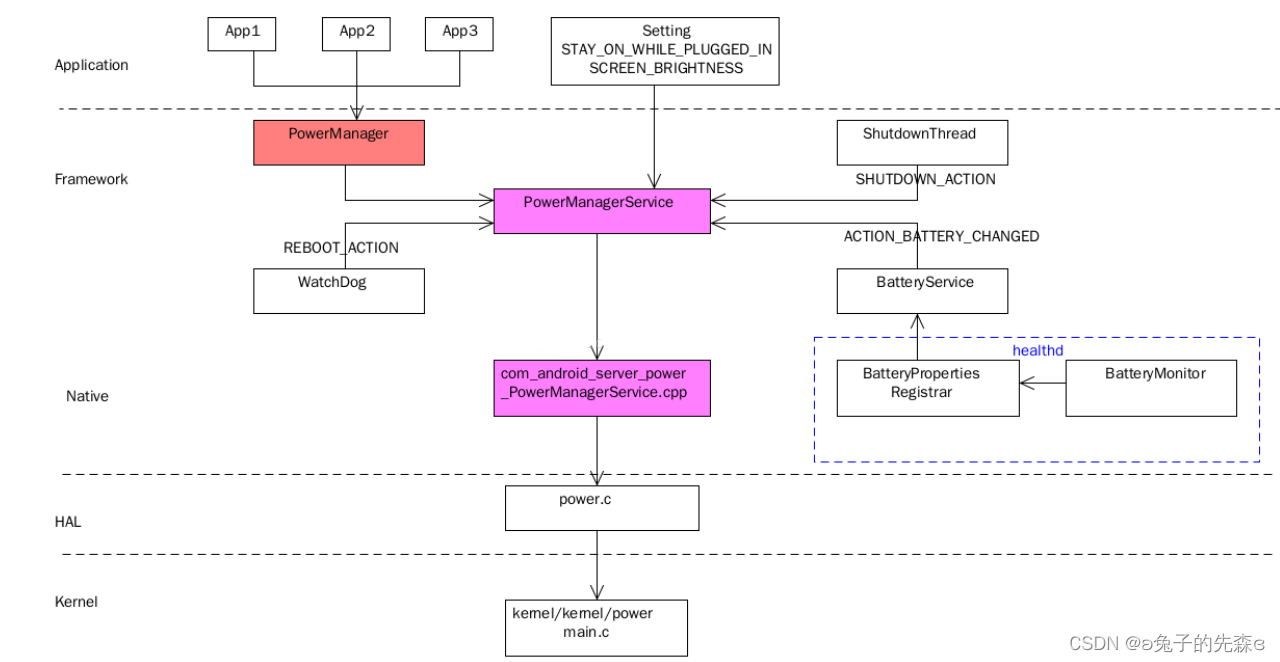
Powermanagerservice (I) - initialization

Using GEE plug-in in QGIS
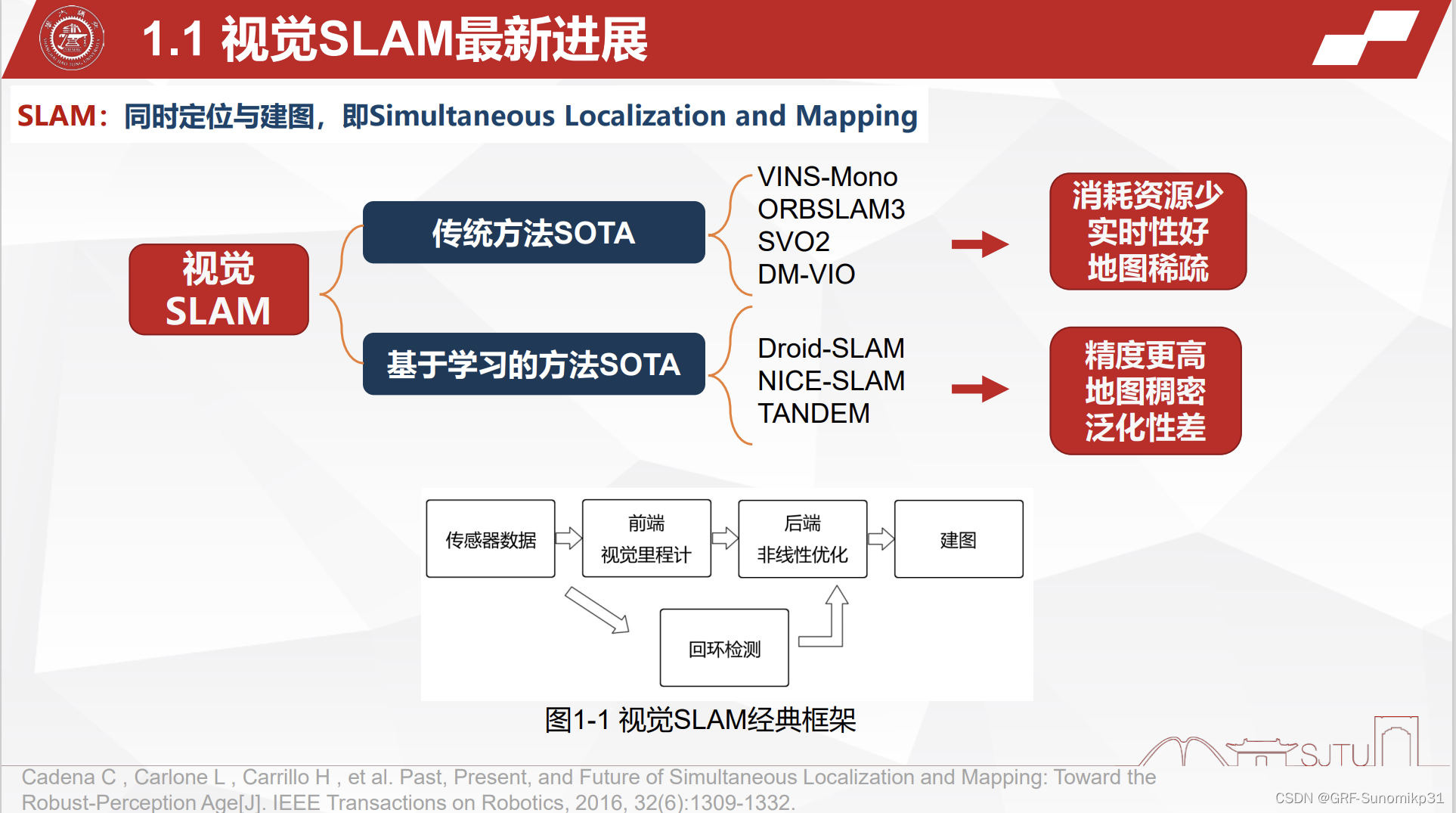
M2dgr slam data set of multi-source and multi scene ground robot
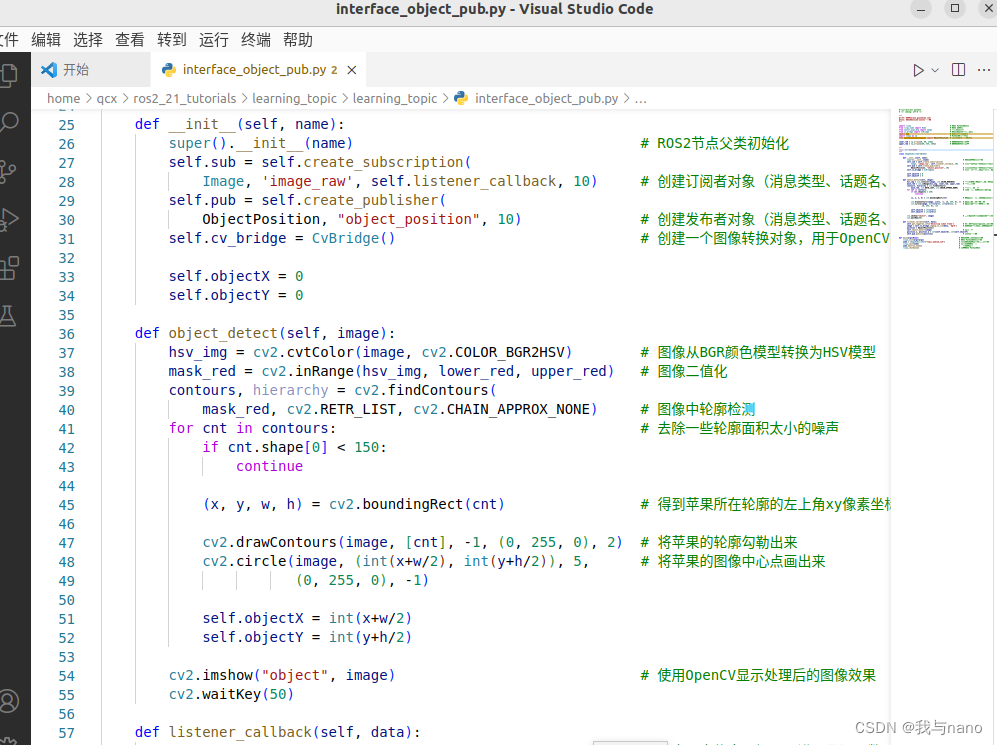
Ros2 - configuration development environment (V)
arcgis_ spatialjoin
随机推荐
Batch convert txt to excel format
HDU1232 畅通工程(并查集)
2022 PMP project management examination agile knowledge points (7)
并发编程 — 死锁排查及处理
SD_CMD_RECEIVE_SHIFT_REGISTER
PostMessage communication
What does soda ash do?
现在有html文件,和用vs制作的mvc(连接了数据库),怎么两个相连?
【软件测试】02 -- 软件缺陷管理
Implementation of one-dimensional convolutional neural network CNN based on FPGA (VIII) implementation of activation layer
Executealways of unity is replacing executeineditmode
第 2 章:小试牛刀,实现一个简单的Bean容器
Qu'est - ce que l'hydroxyde de sodium?
SD_ CMD_ RECEIVE_ SHIFT_ REGISTER
Steps and FAQs of connecting windows Navicat to Alibaba cloud server MySQL
Concurrent programming - how to interrupt / stop a running thread?
SOC_SD_CMD_FSM
What is sodium hydroxide?
Negative number storage and type conversion in programs
Reading literature sorting 20220104