当前位置:网站首页>HDU1232 畅通工程(并查集)
HDU1232 畅通工程(并查集)
2022-07-05 07:15:00 【Woodenman杜】
题目链接
http://acm.hdu.edu.cn/showproblem.php?pid=1232
Question
Problem Description
某省调查城镇交通状况,得到现有城镇道路统计表,表中列出了每条道路直接连通的城镇。省政府“畅通工程”的目标是使全省任何两个城镇间都可以实现交通(但不一定有直接的道路相连,只要互相间接通过道路可达即可)。问最少还需要建设多少条道路?
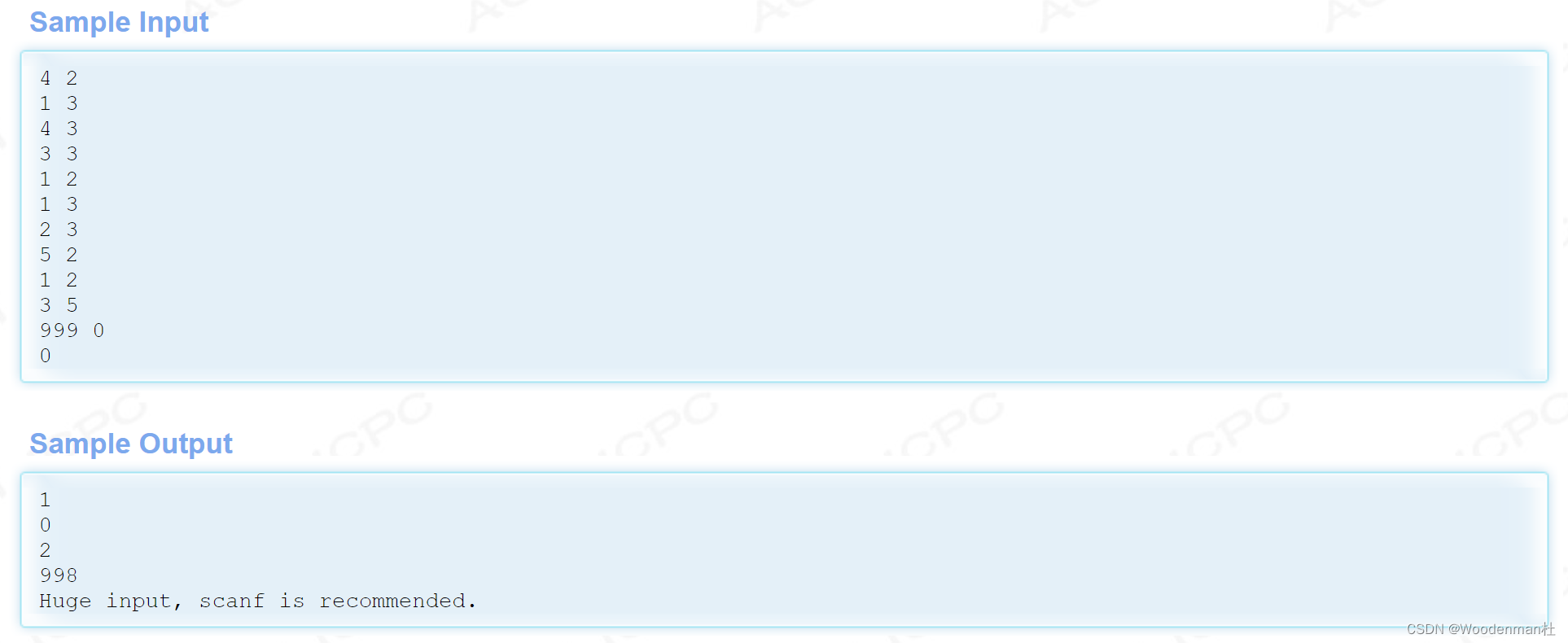
Input
测试输入包含若干测试用例。每个测试用例的第1行给出两个正整数,分别是城镇数目N ( < 1000 )和道路数目M;随后的M行对应M条道路,每行给出一对正整数,分别是该条道路直接连通的两个城镇的编号。为简单起见,城镇从1到N编号。
注意:两个城市之间可以有多条道路相通,也就是说
3 3
1 2
1 2
2 1
这种输入也是合法的
当N为0时,输入结束,该用例不被处理。
Output
对每个测试用例,在1行里输出最少还需要建设的道路数目。
Solve
很明显可以看出来这就是一个最小生成树的变形,变得简单了^_^
可以先看一下这篇文章:最小生成树的两种算法
其中的Kruskal算法是比较常用的,不过这道题没那么麻烦,单纯并查集就行~
我们可以知道要打通 n 个节点,至少要 n-1 条边,所以定义res = n - 1
根据这一条件,再利用并查集判断每一条读入的边是否已经连接:
如果原来已经连接了,就不需要做任何事情;
如果没有连接,那读入该边之后就连接了,所需建设的道路数也会减一(res--)
读边结束后得到的 res 就是结果了
AC Code
#include <iostream>
#include <cstring>
#define N 1000
using namespace std;
int fa[N+1], n, m;
//查找根节点
int find(int x)
{
if(fa[x] == x)
return x;
else
return fa[x] = find(fa[x]);
}
int main(void)
{
while(cin >>n && n != 0)
{
cin >>m;
//初始化并查集
for(int i = 1; i <= n; i++) fa[i] = i;
int res = n - 1;
for(int i = 1; i <= m; i++){
int x, y; cin >>x >>y;
int dx = find(x); int dy = find(y);
//已经连接 直接跳过,未连接 连接并记录
if(dx == dy) continue;
fa[dx] = dy;
res--;
}
cout <<res <<endl;
}
return 0;
}边栏推荐
猜你喜欢
Ros2 - node (VII)
Build a microservice cluster environment locally and learn to deploy automatically
Spinningup drawing curve
C语言数组专题训练
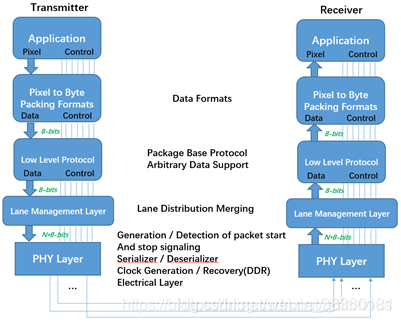
Mipi interface, DVP interface and CSI interface of camera
![[vscode] prohibit the pylance plug-in from automatically adding import](/img/a7/d96c0c4739ff68356c15bafbbb1328.jpg)
[vscode] prohibit the pylance plug-in from automatically adding import
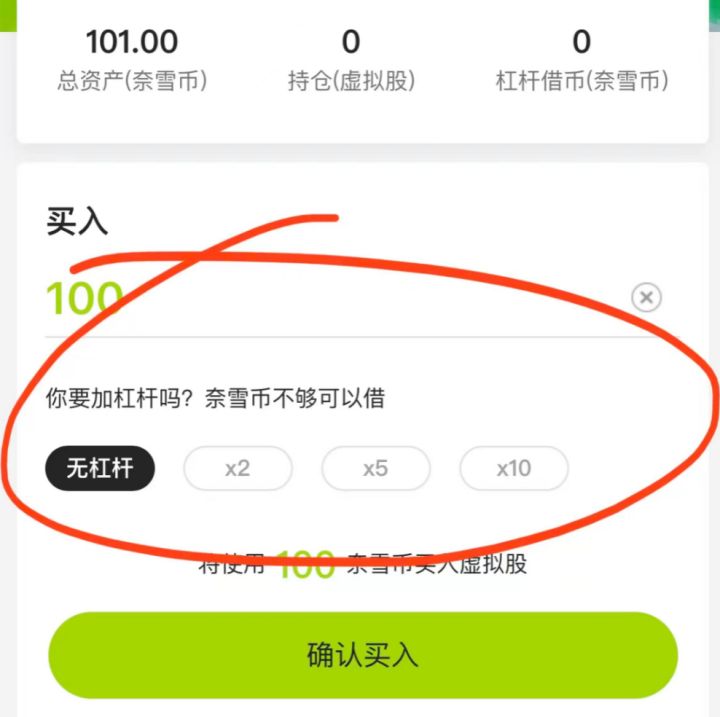
Inftnews | drink tea and send virtual stocks? Analysis of Naixue's tea "coin issuance"
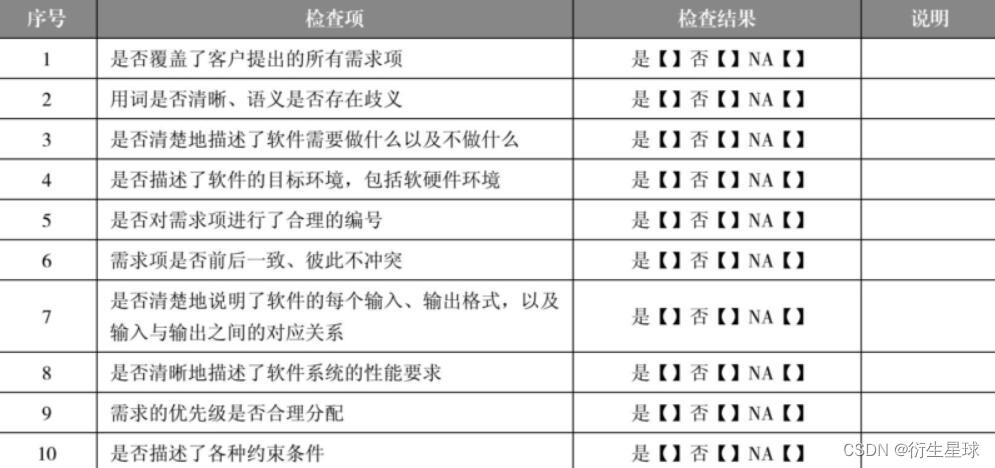
【软件测试】06 -- 软件测试的基本流程

Anaconda navigator click open no response, can not start error prompt attributeerror: 'STR' object has no attribute 'get‘
ROS2——node节点(七)
随机推荐
解读最早的草图-图像翻译工作SketchyGAN
In C language, int a= 'R'
[software testing] 02 -- software defect management
Ros2 - first acquaintance with ros2 (I)
[solved] there is something wrong with the image
[tf1] save and load parameters
ROS2——配置开发环境(五)
Matlab在线性代数中的应用(四):相似矩阵及二次型
DelayQueue延迟队列的使用和场景
U-boot initialization and workflow analysis
SD_CMD_RECEIVE_SHIFT_REGISTER
docker安装mysql并使用navicat连接
SOC_SD_DATA_FSM
氫氧化鈉是什麼?
C语言数组专题训练
Delayqueue usage and scenarios of delay queue
Target detection series - detailed explanation of the principle of fast r-cnn
Chapter 2: try to implement a simple bean container
Raspberry pie 4B arm platform aarch64 PIP installation pytorch
【obs】x264编码:“buffer_size“