当前位置:网站首页>M2dgr slam data set of multi-source and multi scene ground robot
M2dgr slam data set of multi-source and multi scene ground robot
2022-07-05 07:10:00 【GRF-Sunomikp31】
M2DGR: Multi source and multi scene Ground robots SLAM Data sets
Paper:https://arxiv.org/pdf/2112.13659.pdf
Source :ICRA2022 & RAL2021
Project address :https://github.com/SJTU-ViSYS/M2DGR
Speaker :M2DGR One work was handed over to master Yinjie , Tutor Professor zoudanping ;
ICRA Official share :https://www.bilibili.com/video/BV1q3411G7iF
Paper Literature Review: Temporary vacancy ;
Notes
The outline :
- 1. Multi-source SLAM Current situation of the development of
- 2. Main stream SLAM Data set review
- 3.M2DGR Acquisition platform and environment
- 4. Experimental evaluation and result analysis
- 5. Data set usage guide
1 Multi-source SLAM Current situation of the development of
The main contents include : Vision SLAM、 laser SLAM、 Multi source fusion ;
among : Multi source fusion SLAM Method Can effectively improve SLAM Accuracy and robustness , It is one of the hottest fields at present ;
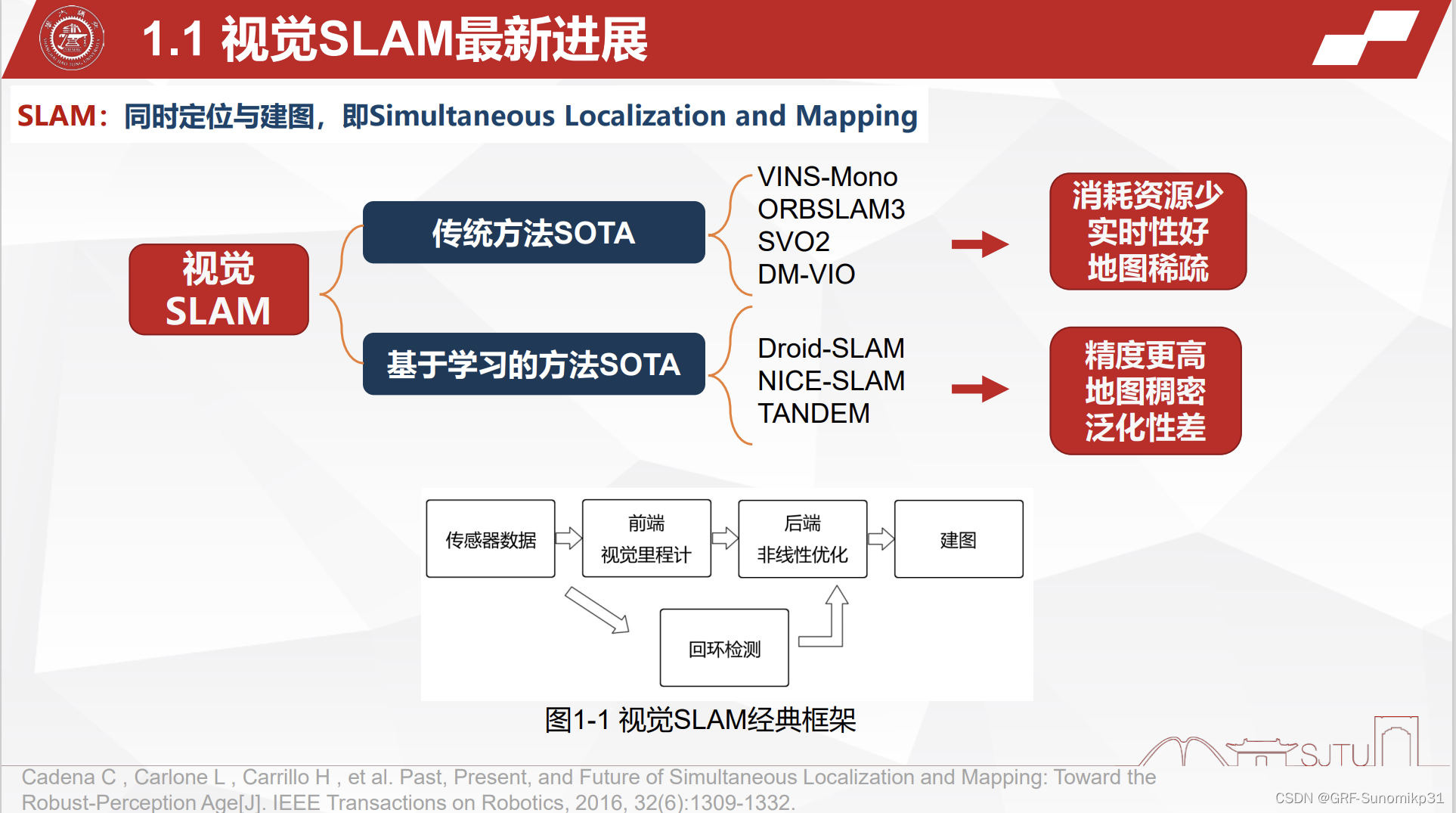
VSLAM It is mainly divided into the above four modules ; It is mainly divided into traditional methods and learning based methods ; At present, academia will think ORB-SLAM3 Performance ratio of VINS-Mono Better , This is TUM-VI and EuRoC Conclusions drawn on two data sets , But the speaker found through experimental verification : On cars and real cars ,VINS-Mono Performance will be more stable , It would be better ,ORB-SLAM3 It is easy to track failures on such a platform ; If it is on a small scale or by a large number of loops ,ORB-SLAM3 It can reach decimeter level , Even centimeter accuracy .SVO2 Compared with the SVO, Added multi-purpose support 、 Back end optimization and loopback detection , Comparable performance ORB-SLAM3;DM-VIO Is the latest job . It is a system of delayed marginalization , Performance can also be comparable ORB-SLAM3; The above algorithms have their own advantages and disadvantages on different data sets , Can be regarded as SOTA Algorithm ;
Based on learning SLAM In the system ,Droid-slam It's all SLAM The positioning accuracy is the highest , Its presence TUM-RGBDI and EuRoC The performance of is far better than ORB-SLAM3, It can achieve centimeter accuracy in all sequences , Its disadvantage is that it consumes a lot of computing resources , I need two 3090 To run in real time ;NICE-SLAM It is the orientation of Zhejiang University SLAM Dynamic neural implicit scalable coding , Neural implicit is more suitable for rendering dense geometry ( such as IMAP, however Imap It's hard to deal with large scenes ,NICE-SLAM Can handle large scenes );TANDEM It shows good real-time 3D reconstruction performance .
summary : Traditional methods consume less resources , But the constructed map is relatively sparse ; The accuracy of the learning based method will be better , The map is also much denser , But the generalization ability is poor .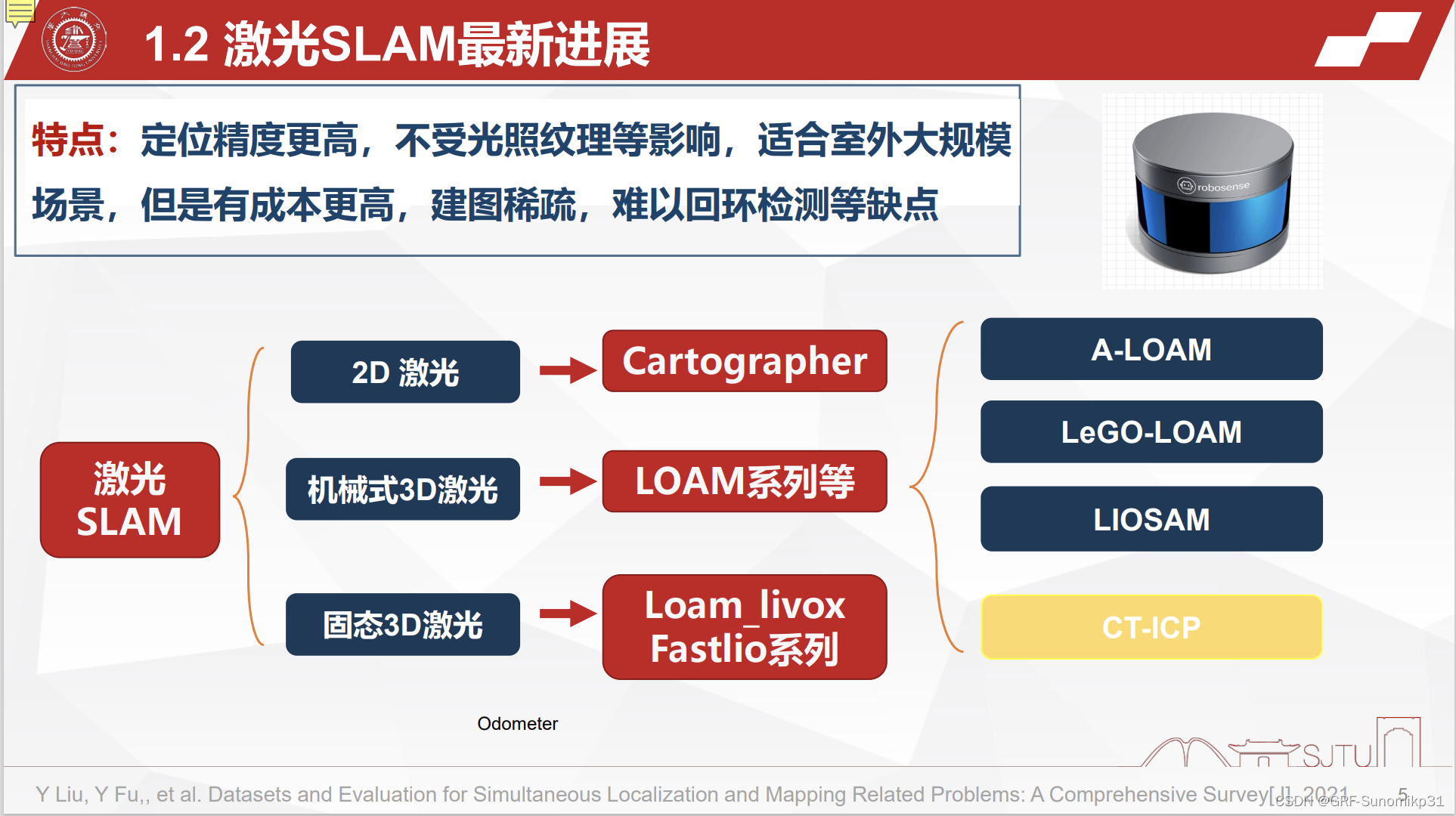
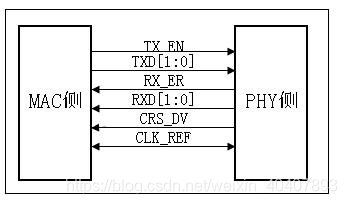
Vision SLAM It is sensitive to illumination and texture information , But laser SLAM It is unaffected ; General situation , laser SLAM Accuracy and robustness ratio in large scenes VSLAM Higher ; laser SLAM The disadvantage is , Difficult to relocate ( Cause drift )、 Build a sparse map 、 The high cost ;Cartographer In the paper, the test accuracy can reach 5cm even to the extent that 3cm; mechanical 3D Lidar can 360° rotate ; solid state 3D Laser radar is used most livox, But solid 3D Lidar has a fixed FOV;
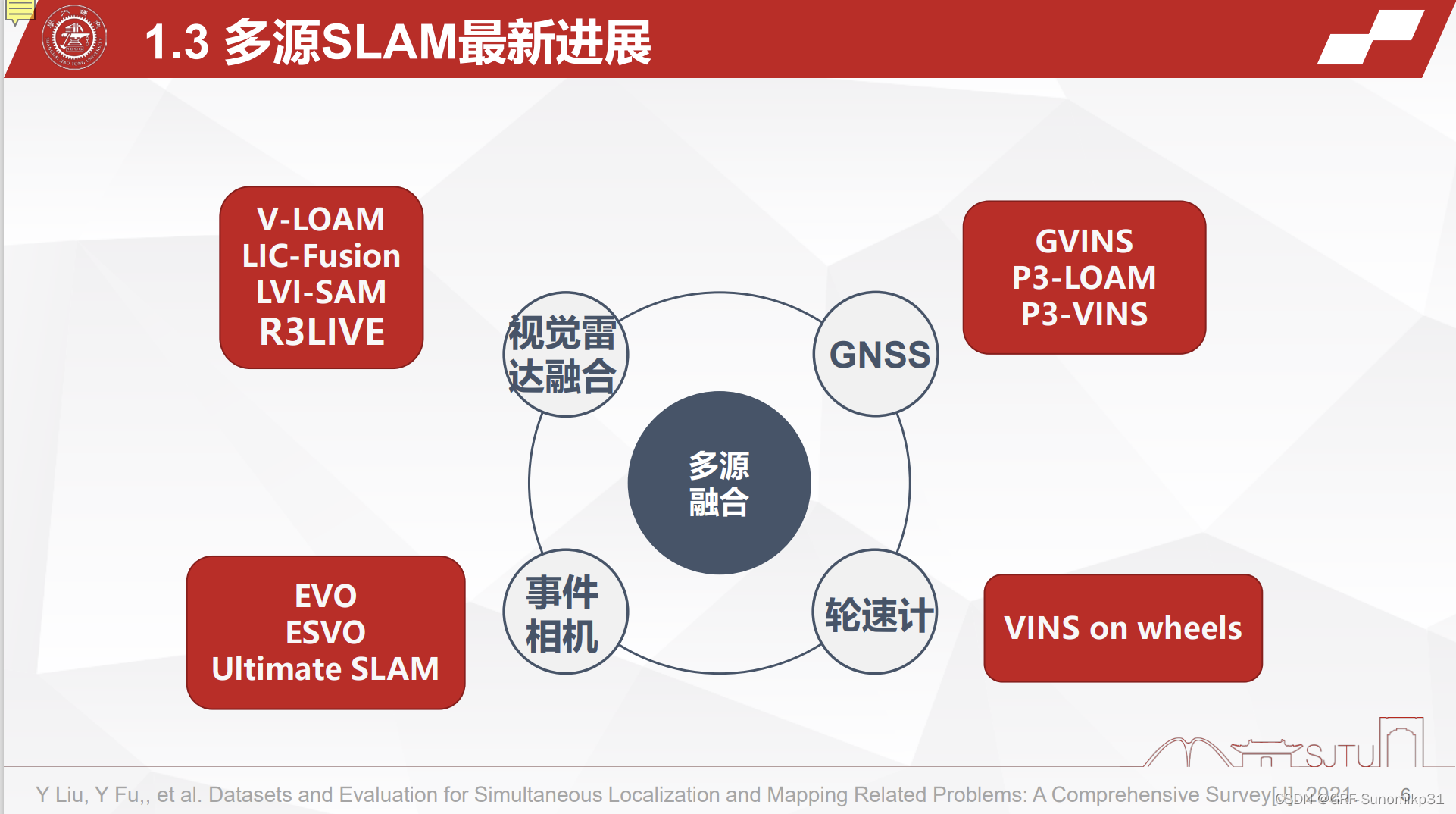
Vision and laser fusion : Earlier work V-LOAM(2014, Non open source );
GNSS The fusion : In the outdoor scene, the global coordinates can be obtained to eliminate the drift ;
Event camera fusion : It can solve the problems of motion blur and overexposure of traditional cameras ;
Wheel speedometer fusion :VINS on wheels It solves the degradation problem in some scenes , At present, the scene has been very perfect .
The speaker believes that the most promising thing at present is GNSS and SLAM Fusion , because GNSS and SLAM Are very complex algorithms , And not many people do this .
2 Main stream SLAM Data set review
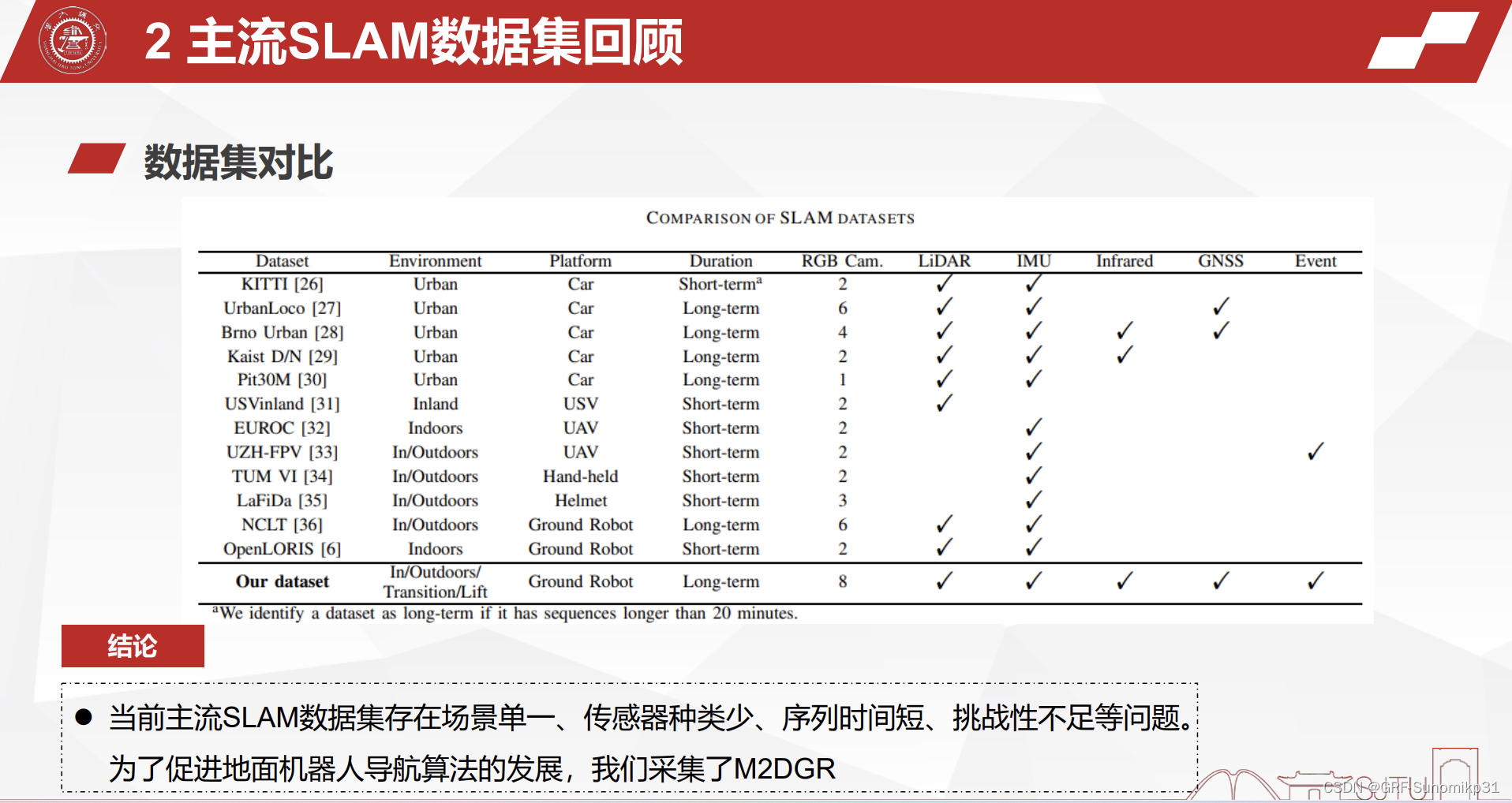
KITTI: It's old and there are few sensors ; Vision SLAM Generally, this data set is not used , And use TUM( hold RGBD) and EUROC( Unmanned aerial vehicle (uav) );
NCLT: Ground robot acquisition , Camera acquisition frequency is low , Fewer sensors ;
OpenLORIS: Ground robot acquisition , Camera internal and external parameters are not published ;gt The acquisition is not rigorous , By laser SLAM Ran out of ;
3 M2DGR Acquisition platform and environment
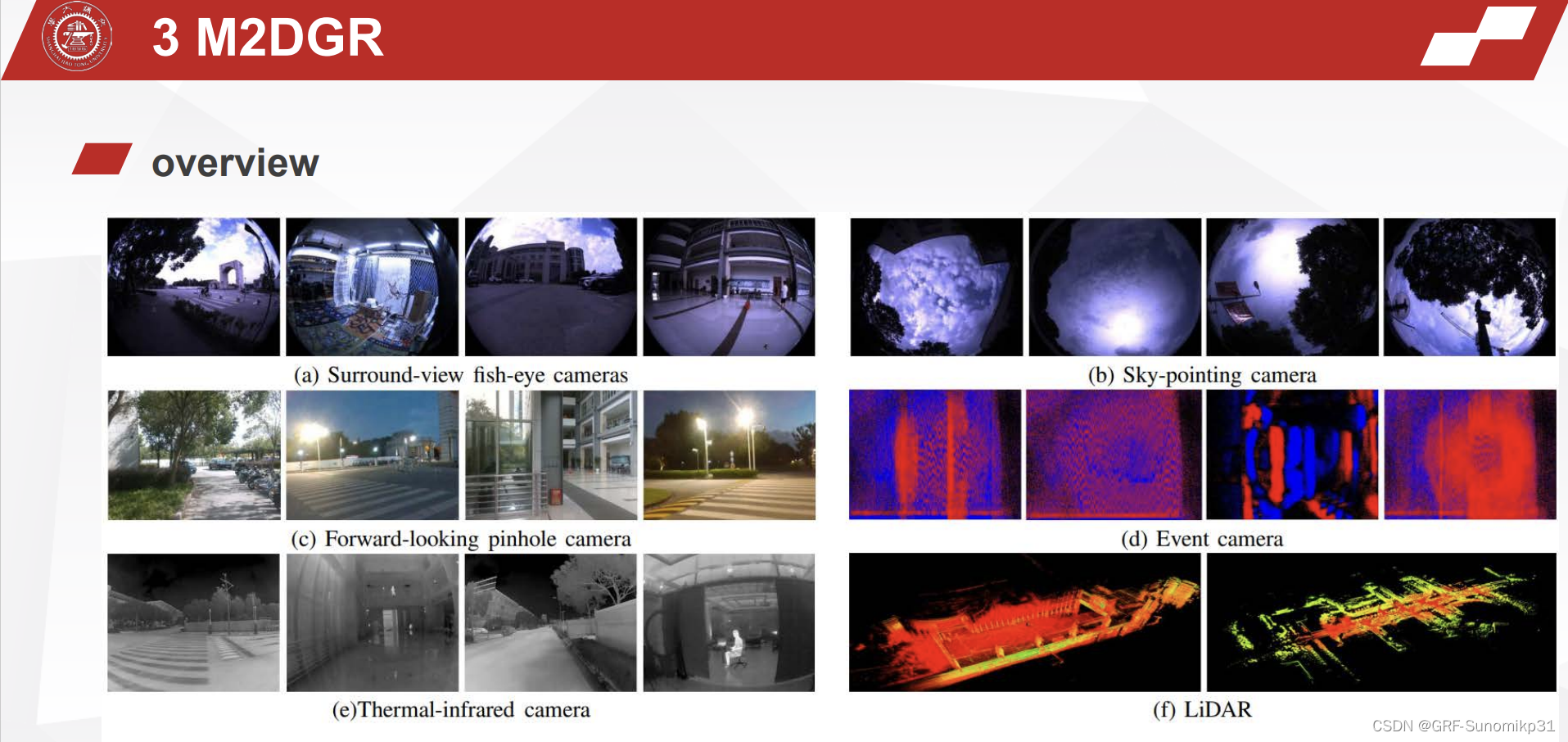
Effect drawing of data collection ;
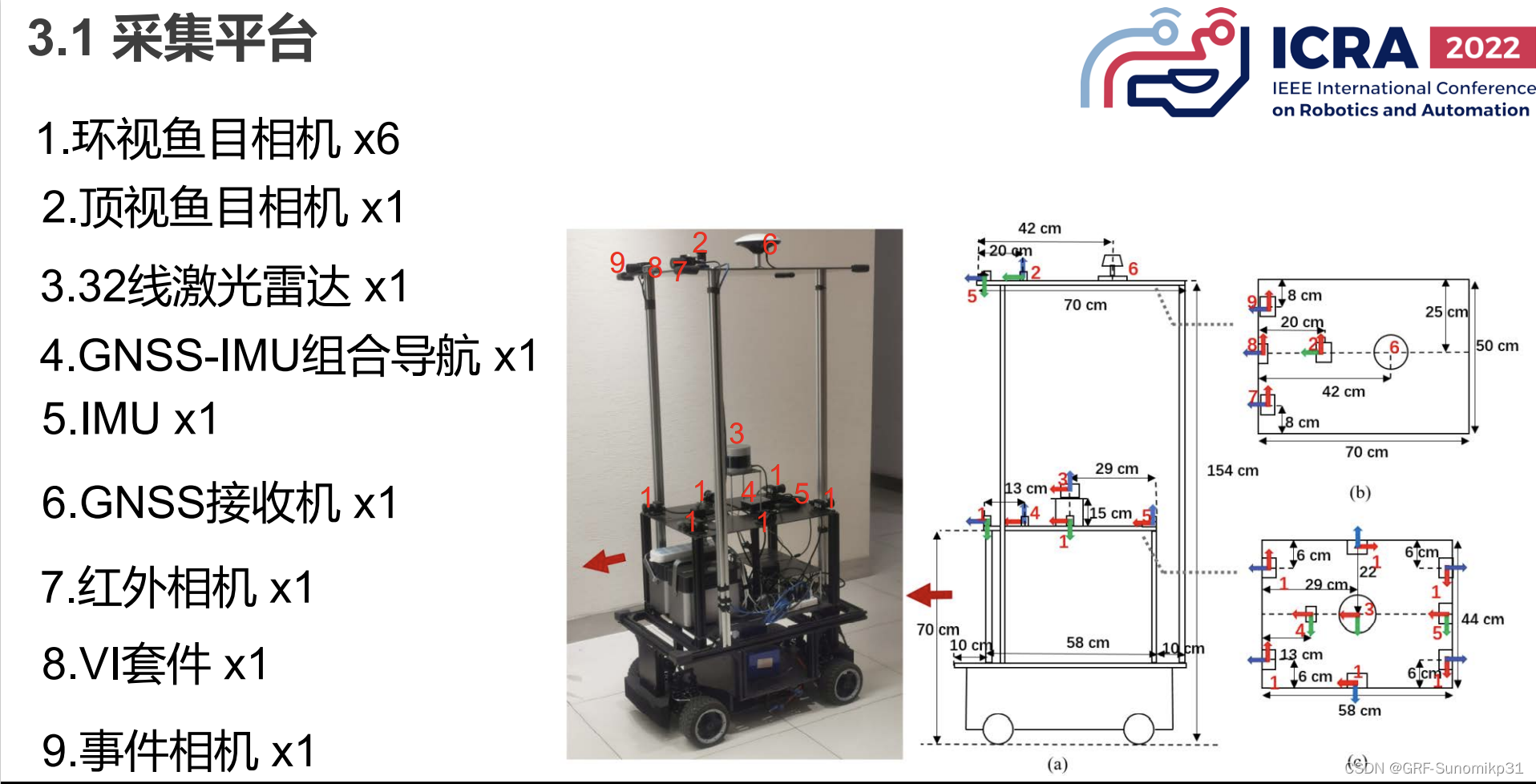
Acquisition platform , The specific equipment is as above ;.GNSS-IMU Integrated navigation is mainly used to collect outdoor RTK Signal as outdoor track gt;lidar It is connected to the laptop through the Internet port . IMU It adopts domestic consumer grade equipment (500-800rmb)

(a) The outdoor sequence is handed in for collection , These sequences are relatively long , The existing SLAM The effect of the algorithm running on it is not ideal , It belongs to a very challenging data set ;
(b)Roomdark It's in a completely dark scene , Used to compare ordinary cameras Performance of infrared camera and event camera ;
The purpose is to test indoor and outdoor alternating SLAM Algorithm performance ;
(d) This sequence is also very challenging ;
4 Experimental evaluation and result analysis
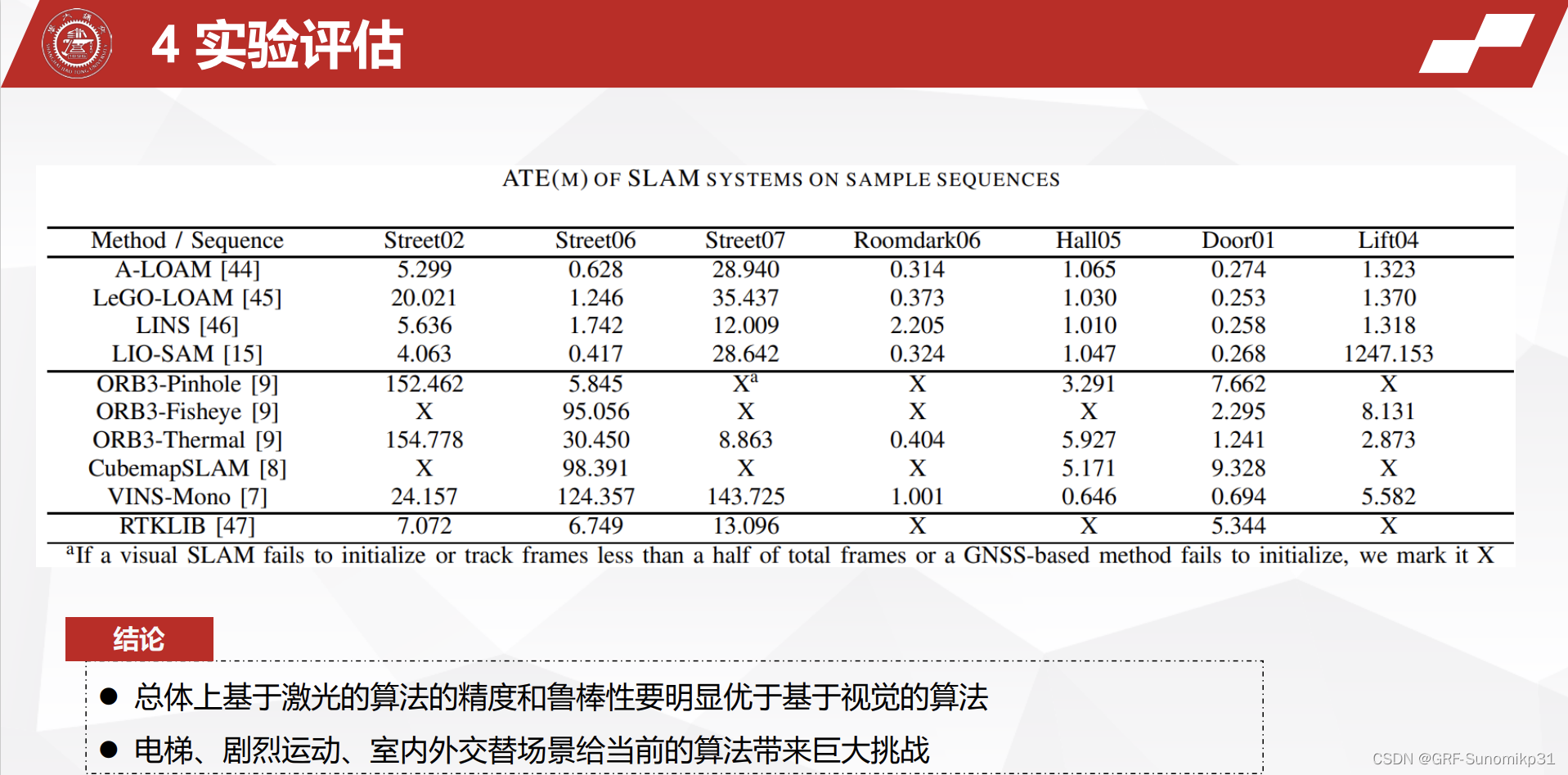
It's on it 7 A representative sequence ;
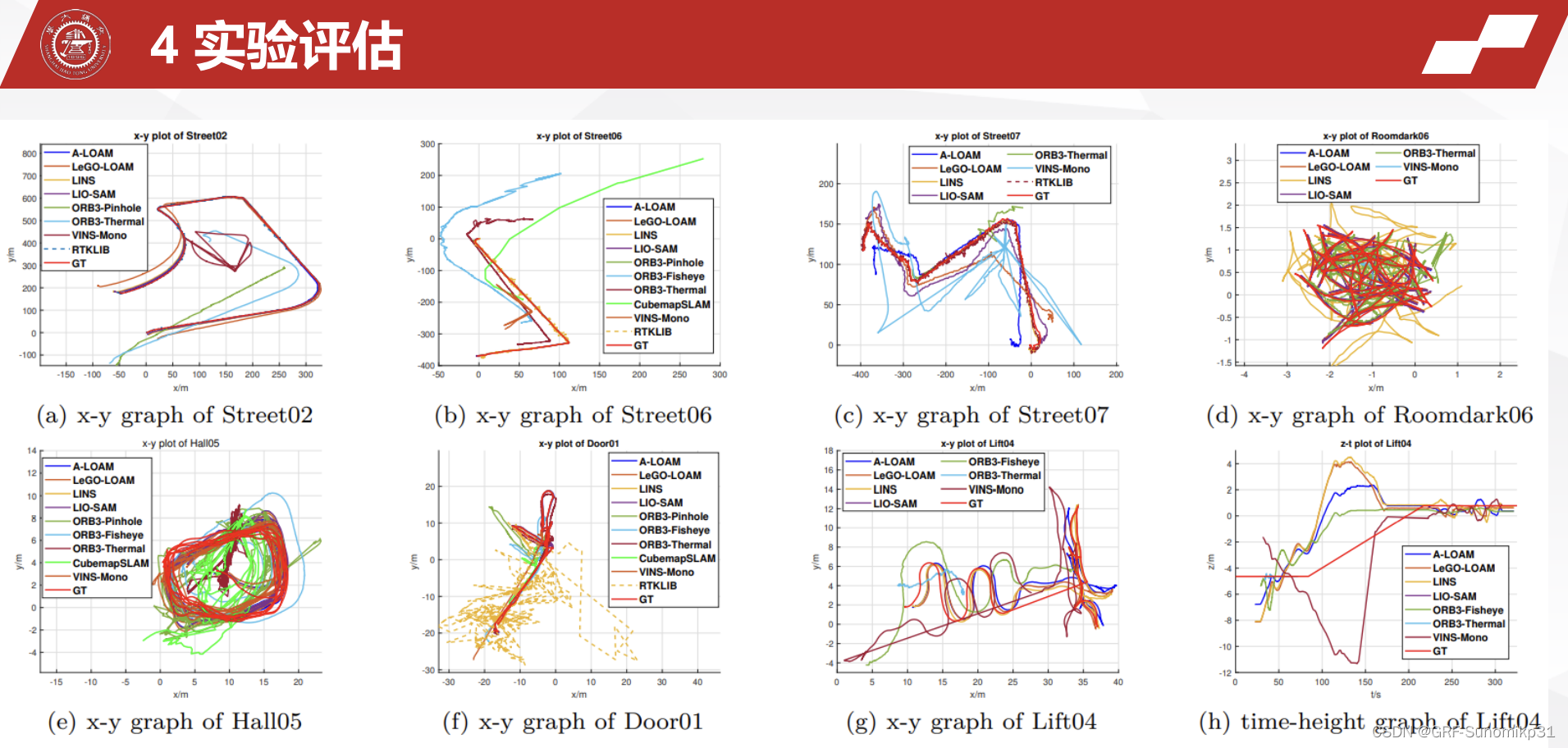
Visualization of positioning results ; The conclusion is : Spooky: ! The drift is very obvious .
5 Data set usage guide
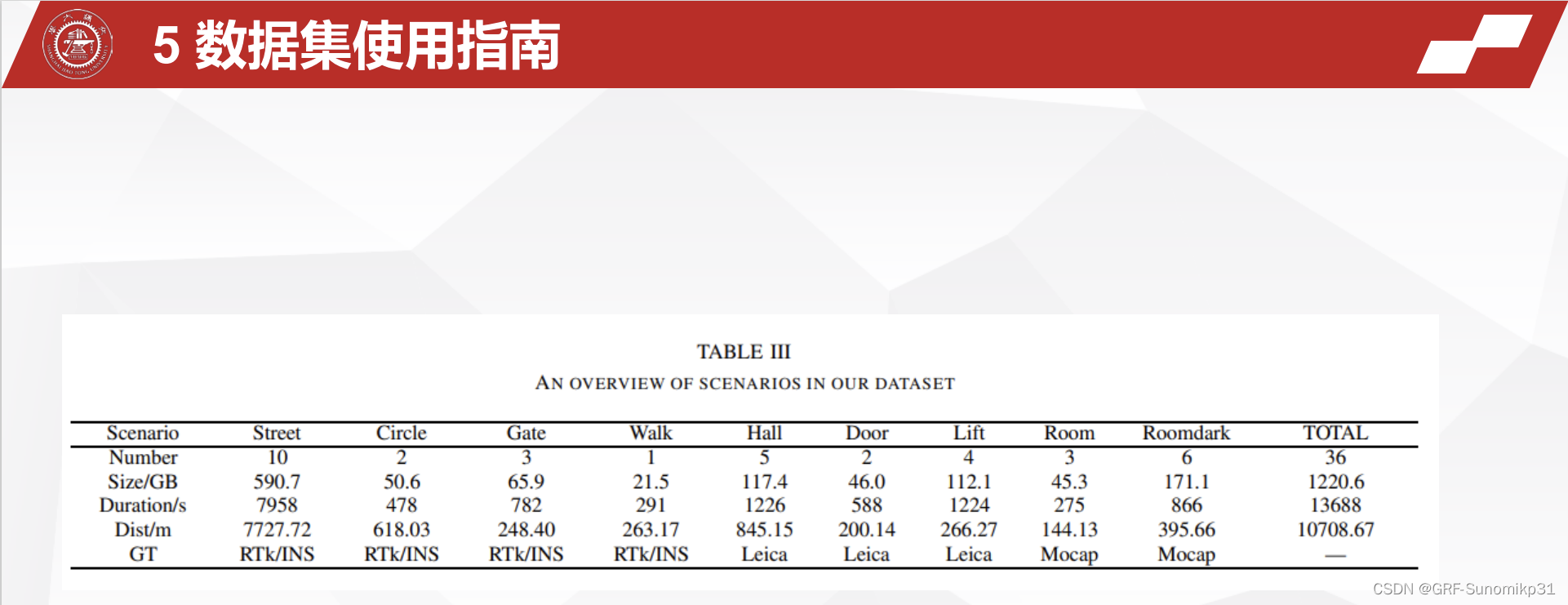
The information of several data sets is listed above .
Students or teachers can connect to the campus network , You can achieve 10M/S .

VSLAM There is no absolute scale for a single purpose , Need to add - s (scale). If your algorithm can be more stable than the above SOTA Algorithm ( For example, your algorithm is better than orb-slam3 Higher than 2-3 rice ), congratulations , You can also send an article ICRA 了
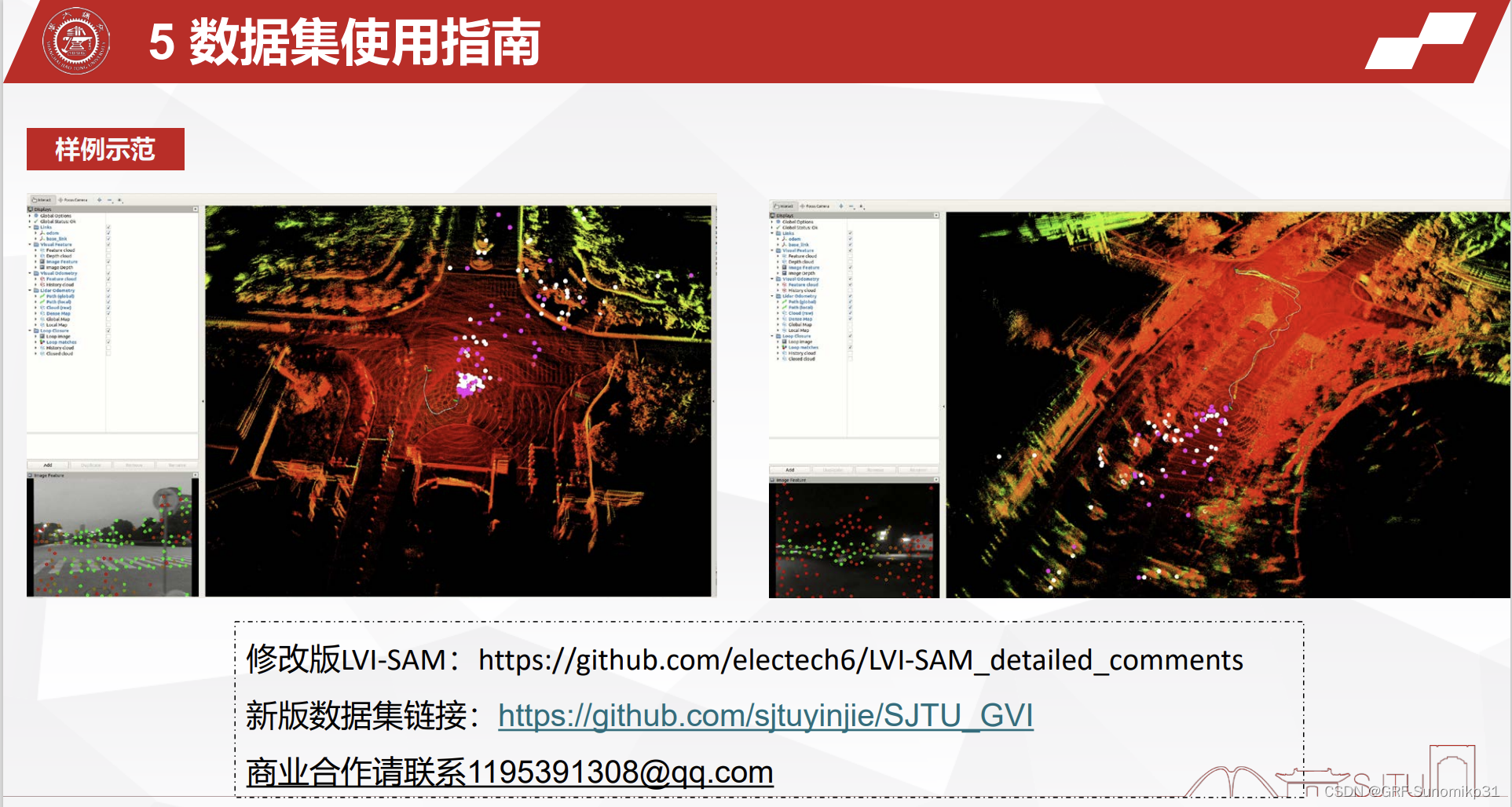
The above is the process of using data sets . The author will keep the data set updated !
Q&A
1. Camera and IMU Calibration use calib , Good effect and simple calibration ;
2. Nine axis IMU Than six axis IMU It can collect more three-dimensional information .
3.KITTI Data set of IMU There may be a problem with the dataset , Not recommended KITTI Running vision SLAM The system of .
4.NUC 3000-5000 The performance of the left and right sides is not very good , It is recommended to use the top equipped NUC.
边栏推荐
- [untitled]
- ROS2——配置开发环境(五)
- ROS2——初识ROS2(一)
- Error: "mountvolume.setup failed for volume PVC fault handling
- Executealways of unity is replacing executeineditmode
- Pycahrm reports an error: indentation error: unindent does not match any outer indentation
- Technical conference arrangement
- Implementation of one-dimensional convolutional neural network CNN based on FPGA (VIII) implementation of activation layer
- [OBS] x264 Code: "buffer_size“
- C语言数组专题训练
猜你喜欢



随机推荐
Steps and FAQs of connecting windows Navicat to Alibaba cloud server MySQL
[untitled]
【无标题】
Ros2 - Service Service (IX)
Binary search (half search)
Ethtool principle introduction and troubleshooting ideas for network card packet loss (with ethtool source code download)
[software testing] 02 -- software defect management
Docker installs MySQL and uses Navicat to connect
Skywalking all
Now there are HTML files and MVC made with vs (connected to the database). How can they be connected?
Netease to B, soft outside, hard in
About vscode, "code unreachable" will be displayed when calling sendline series functions with pwntools“
An article was opened to test the real situation of outsourcing companies
睿智的目标检测59——Pytorch Focal loss详解与在YoloV4当中的实现
postmessage通信
A brief introduction to heading/pitch/roll and omega/phi/kappa
【软件测试】02 -- 软件缺陷管理
Inftnews | drink tea and send virtual stocks? Analysis of Naixue's tea "coin issuance"
M2DGR 多源多场景 地面机器人SLAM数据集
Ros2 topic (VIII)