当前位置:网站首页>SD_ CMD_ RECEIVE_ SHIFT_ REGISTER
SD_ CMD_ RECEIVE_ SHIFT_ REGISTER
2022-07-05 07:07:00 【Eight four one one】
Catalog
1. Interface
- Normal clock reset soft reset
- Enter the current status of the entry in_current_state as well as sd Send the command line in_serial_cmd, Here's what's interesting , from sd The card was sent in_serial_cmd It is the single that makes up the response bit The signal
- Received bit Count in_has_receive_bit
- Response type in_long_response,1 Long 0 short
- Report crc Check for errors out_cmd_receive_crc_error
- Four response signals response[3:0]
input in_sd_clk ;
input hrst_n ;
input in_soft_reset ;
input [2:0] in_current_state ;
input in_serial_cmd ;
input [7:0] in_has_receive_bit ;
input in_long_response ;
output out_cmd_receive_crc_error ;
output response0 ;
output response1 ;
output response2 ;
output response3 ;
2. Response output generation
- The format of long response is shown in the following figure

- among start bit Not recorded , That is, from the transmission bit , We started from 8 Bit is also [7] Start shift deposit
- response3 The highest 8bit=0, be left over 24bit from in_serial_cmd Normal read
- Short response only response0 That's enough , The format is as follows :

always @(posedge in_sd_clk or negedge hrst_n) begin
if(!hrst_n)
begin
response0 <= 32'b0;
response1 <= 32'b0;
response2 <= 32'b0;
response3 <= 32'b0;
end
else if (!in_soft_reset)
begin
response0 <= 32'b0;
response1 <= 32'b0;
response2 <= 32'b0;
response3 <= 32'b0;
end
else if (in_current_state == `CMD_STATE_SEND)
begin
response0 <= 32'b0;
response1 <= 32'b0;
response2 <= 32'b0;
response3 <= 32'b0;
end
else if (in_current_state == `CMD_STATE_RECEIVE)
begin
if(in_long_response)
begin
if((in_has_receive_bit >= 7) && (in_has_receive_bit <=30))
response3 <= {
response3[30:0],in_serial_cmd};
else if((in_has_receive_bit >= 31) && (in_has_receive_bit <= 62))
response2 <= {
response2[30:0],in_serial_cmd};
else if((in_has_receive_bit >= 63) && (in_has_receive_bit <= 94))
response1 <= {
response1[30:0],in_serial_cmd};
else if((in_has_receive_bit >= 95) && (in_has_receive_bit <= 126))
response0 <= {
response0[30:0],in_serial_cmd};
end
else if((in_has_receive_bit >= 7) && (in_has_receive_bit <= 38))
response0 <= {
response0[30:0],in_serial_cmd};
end
end
3. Received by sd From card crc7 Check the signal
- First order crc yes 8 Bit
- Also by in_serial_cmd Single line transmission , Therefore, it is also necessary to move and deposit
- Appearance correspondence crc The position in the format is as follows :

- Short corresponding crc The position in the format is as follows :

always @(posedge in_sd_clk or negedge hrst_n) begin
if(!hrst_n)
receive_cec_reg <= 7'b0;
else if (!in_soft_reset)
receive_cec_reg <= 7'b0;
else if (in_current_state == `CMD_STATE_SEND)
receive_cec_reg <= 7'b0;
else if (in_current_state == `CMD_STATE_RECEIVE)
begin
if (in_long_response)
begin
if((in_has_receive_bit >= 127) && (in_has_receive_bit <= 133))
receive_cec_reg <= {
receive_cec_reg[5:0],in_serial_cmd};
end
else begin
if((in_has_receive_bit >= 39) && (in_has_receive_bit <= 45))
receive_cec_reg <= {
receive_cec_reg[5:0],in_serial_cmd};
end
end
end
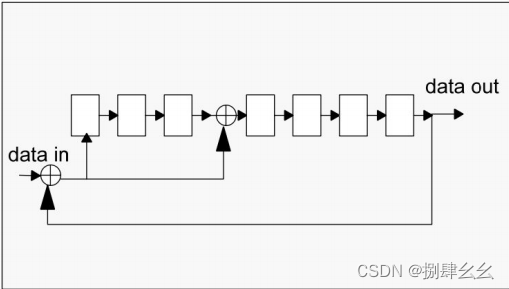
4. Calculate for yourself crc7 Value
- You need to calculate again crc The value of comes from sd Card received crc compare
- If the same , Then the command is ok , If it is not the same , Report an error out_cmd_receive_crc_error
- Calculation crc7 Methods :[0] and [3] These two bits need to be XOR , Other shifts are ok , See the picture below
always @(posedge in_sd_clk or negedge hrst_n) begin
if(!hrst_n)
receive_cec_reg <= 7'b0;
else if (!in_soft_reset)
receive_crc_reg <= 7'b0;
else if(in_current_state == `CMD_STATE_SEND)
receive_crc_reg <= 7'b0;
else if (in_current_state == `CMD_STATE_RECEIVE)
begin
if(in_long_response)
begin
if((in_has_receive_bit >= 7) && (in_has_receive_bit <=126))
begin
generate_crc_reg[0] <= in_serial_cmd^generate_crc_reg[6];
generate_crc_reg[1] <= generate_crc_reg[0];
generate_crc_reg[2] <= generate_crc_reg[1];
generate_crc_reg[3] <= in_serial_cmd^generate_crc_reg[6]^generate_crc_reg[2];
generate_crc_reg[4] <= generate_crc_reg[3];
generate_crc_reg[5] <= generate_crc_reg[4];
generate_crc_reg[6] <= generate_crc_reg[5];
end
end
else
begin
if((in_has_receive_bit >= 0) && (in_has_receive_bit <=38))
begin
generate_crc_reg[0] <= in_serial_cmd^generate_crc_reg[6];
generate_crc_reg[1] <= generate_crc_reg[0];
generate_crc_reg[2] <= generate_crc_reg[1];
generate_crc_reg[3] <= in_serial_cmd^generate_crc_reg[6]^generate_crc_reg[2];
generate_crc_reg[4] <= generate_crc_reg[3];
generate_crc_reg[5] <= generate_crc_reg[4];
generate_crc_reg[6] <= generate_crc_reg[5];
end
end
end
end
5. contrast crc7 produce out_cmd_receive_crc_error
- We received receive_crc_reg
- Later we calculated generate_crc_reg
- After receiving, that is 135 perhaps 47bit You can make a comparison
always @(posedge in_sd_clk or negedge hrst_n) begin
if (!hrst_n)
out_cmd_receive_crc_error <= 1'b0;
else if (!in_soft_reset)
out_cmd_receive_crc_error <= 1'b0;
else if (in_current_state == `CMD_STATE_SEND)
out_cmd_receive_crc_error <= 1'b0;
else if (in_current_state == `CMD_STATE_RECEIVE)
begin
if (in_long_response)
begin
if(in_has_receive_bit == 134)
out_cmd_receive_crc_error <= !(generate_crc_reg == receive_crc_reg);
end
else if (in_has_receive_bit == 46)
out_cmd_receive_crc_error <= !(generate_crc_reg == receive_crc_reg);
end
end
边栏推荐
猜你喜欢
![[untitled]](/img/d5/2ac2b15818cf66c241e307c6723d50.jpg)


随机推荐
使用paping工具进行tcp端口连通性检测
[tf] Unknown: Failed to get convolution algorithm. This is probably because cuDNN failed to initial
2022.06.27_每日一题
基于FPGA的一维卷积神经网络CNN的实现(八)激活层实现
Inftnews | drink tea and send virtual stocks? Analysis of Naixue's tea "coin issuance"
Written examination notes
并发编程 — 如何中断/停止一个运行中的线程?
【软件测试】05 -- 软件测试的原则
An article was opened to test the real situation of outsourcing companies
ROS2——安装ROS2(三)
6-4 search by serial number of linked list
Error: “MountVolume.SetUp failed for volume pvc 故障处理
[software testing] 05 -- principles of software testing
Get class files and attributes by reflection
PHY drive commissioning - phy controller drive (II)
Mutual transformation between two-dimensional array and sparse array (sparse matrix)
PowerManagerService(一)— 初始化
Volcano 资源预留特性
Preemption of CFS scheduling
Sre core system understanding