当前位置:网站首页>Novatel board oem617d configuration step record
Novatel board oem617d configuration step record
2022-07-06 12:53:00 【Proletarians】
One 、 Preparation before configuration
1、 Hardware aspect
card 、12v The power adapter 、 The antenna 、u Turn string 、u turn u
2、 Software aspect
Click to get the software
NovAtel Connect( Configuration command )
NovAtel Convert
NovAtel USB Drivers
sscom( Serial port printing tool )
OEM6 User's Manual
rtknavi
Two 、 Board configuration
The antenna should be connected to primary On ,u turn u Connect the board and pc Connect (com3),u Turn the serial card and pc Connect (com1 or com2), Use 12v Power on the power adapter , Open software NovAtel Connect New communication , Select the corresponding serial port and baud rate .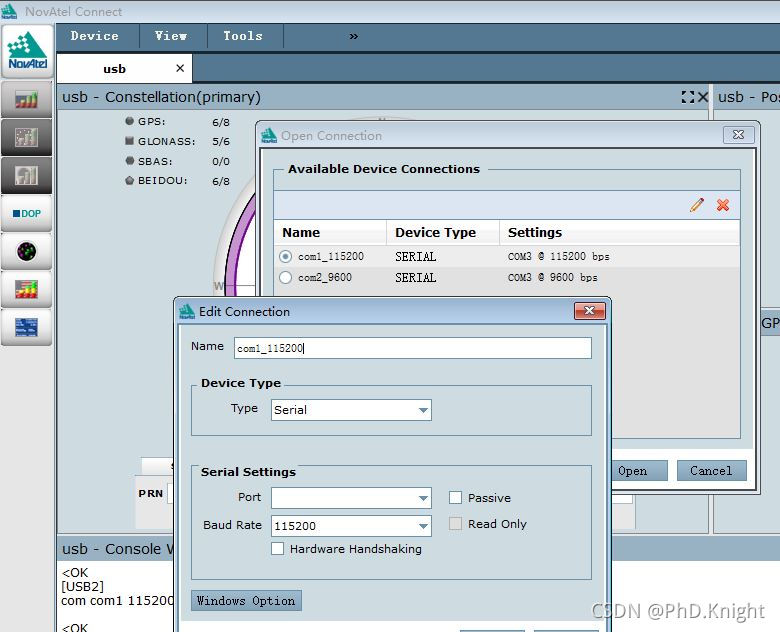
After the communication is established , stay view The window can see the position 、 Constellation and other information , explain ok.
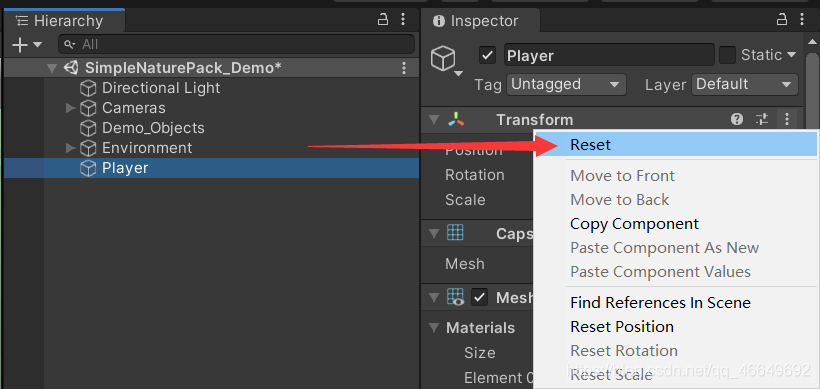
The next step is to console Window for board configuration , Just type the command , As shown in the figure below :
About the configuration of base stations and mobile stations , There are in the user manual , Let's not go into details .
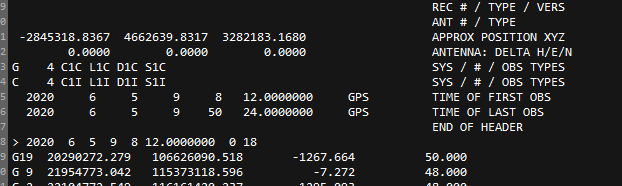
For example, use log To configure nmea Output or rtcm3 Output , Use u The transfer string can be in sscom See the print result of data output in , Note the baud rate , The default is 9600.
3、 ... and 、 And Chihiro do rtk test
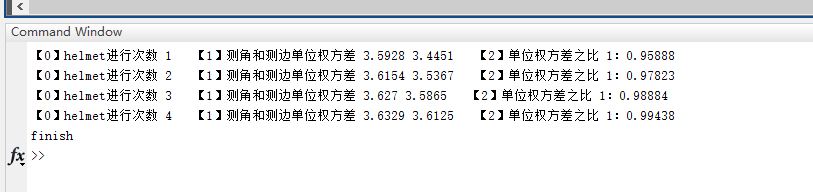
rover Use serial port to connect 617D Data input ,base Use Qianxun ntrip Broadcast as input , Use gps Dual frequency , give the result as follows :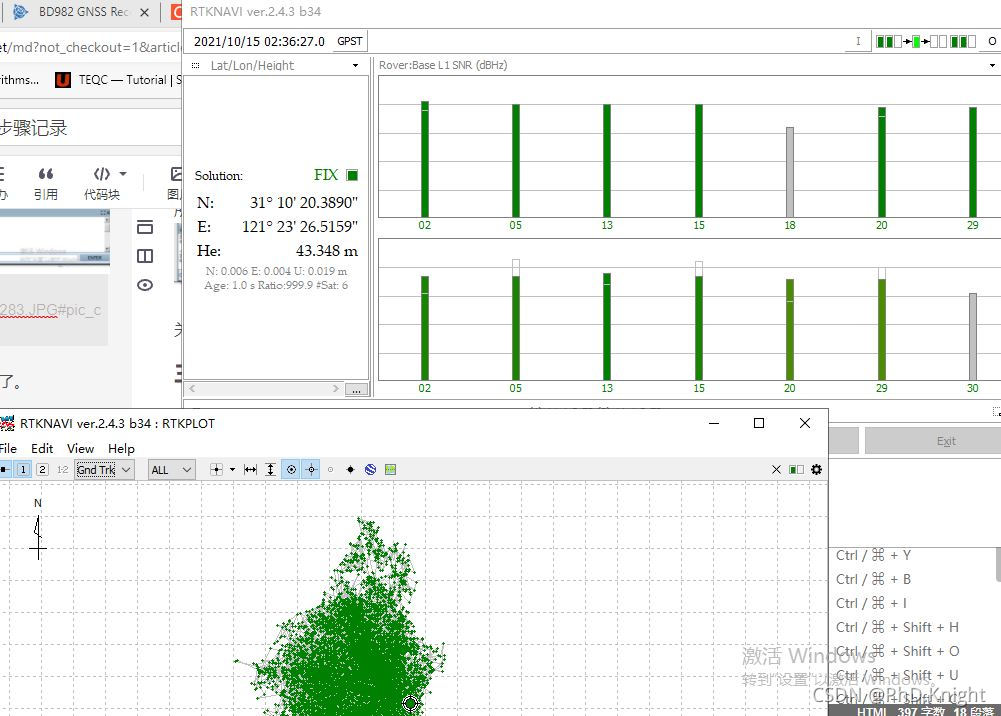
summary : About board operation configuration , There are in the user manual . Mainly record the first use 5v The adapter board does not work
边栏推荐
- Office提示您的许可证不是正版弹框解决
- Lean product development - Lean Software Development & lean product development
- [algorithm] sword finger offer2 golang interview question 10: subarray with sum K
- Unity scene jump and exit
- FairyGUI增益BUFF数值改变的显示
- Programming homework: educational administration management system (C language)
- Realization of the code for calculating the mean square error of GPS Height Fitting
- [算法] 剑指offer2 golang 面试题5:单词长度的最大乘积
- Problems and solutions of robust estimation in rtklib single point location spp
- Fabrication d'un sac à dos simple fairygui
猜你喜欢

The master of double non planning left the real estate company and became a programmer with an annual salary of 25W. There are too many life choices at the age of 25
![[algorithm] sword finger offer2 golang interview question 3: the number of 1 in the binary form of the first n numbers](/img/64/0f352232359c7d44f12b20a64c7bb4.png)
[algorithm] sword finger offer2 golang interview question 3: the number of 1 in the binary form of the first n numbers
FairyGUI簡單背包的制作
MySQL shutdown is slow
Detailed explanation of balanced binary tree is easy to understand
![[算法] 剑指offer2 golang 面试题12:左右两边子数组的和相等](/img/11/ee0628a68542236fc641966579a31a.png)
[算法] 剑指offer2 golang 面试题12:左右两边子数组的和相等

C programming exercise
第一人称视角的角色移动
C code implementation of robust estimation in rtklib's pntpos function (standard single point positioning spp)
【GNSS数据处理】赫尔默特(helmert)方差分量估计解析及代码实现
随机推荐
Comparative analysis of the execution efficiency of MySQL 5.7 statistical table records
[算法] 剑指offer2 golang 面试题13:二维子矩阵的数字之和
Unity3D,阿里云服务器,平台配置
wsl常用命令
最短Hamilton路径 (状压DP)
[算法] 剑指offer2 golang 面试题12:左右两边子数组的和相等
平衡二叉树详解 通俗易懂
The master of double non planning left the real estate company and became a programmer with an annual salary of 25W. There are too many life choices at the age of 25
1041 be unique (20 points (s)) (hash: find the first number that occurs once)
Affichage du changement de valeur du Buff de gain de l'interface graphique de défaillance
Compilation principle: preprocessing of source program and design and implementation of lexical analysis program (including code)
堆排序【手写小根堆】
In 2020, the average salary of IT industry exceeded 170000, ranking first
Unity3d makes the registration login interface and realizes the scene jump
编辑距离(多源BFS)
Itext 7 生成PDF总结
How to improve the deletion speed of sequential class containers?
FGUI工程打包发布&导入Unity&将UI显示出来的方式
FairyGUI人物状态弹窗
[GNSS] robust estimation (robust estimation) principle and program implementation