当前位置:网站首页>学术报告系列(六) - Autonomous Driving on the journey to full autonomy
学术报告系列(六) - Autonomous Driving on the journey to full autonomy
2022-07-07 02:12:00 【同学来啦】
- 个人主页: 同学来啦
- 🤟 版权: 本文由【同学来啦】原创、在CSDN首发、需要转载请联系博主
- 如果文章对你有帮助,欢迎关注、点赞、收藏和订阅专栏哦
- 🧑 报告声明:资料整理于EAI MONAMI 2020会议 香港城市大学汪建平教授报告(报名题目:Autonomous Driving on the journey to full autonomy)
文章目录
一、概述
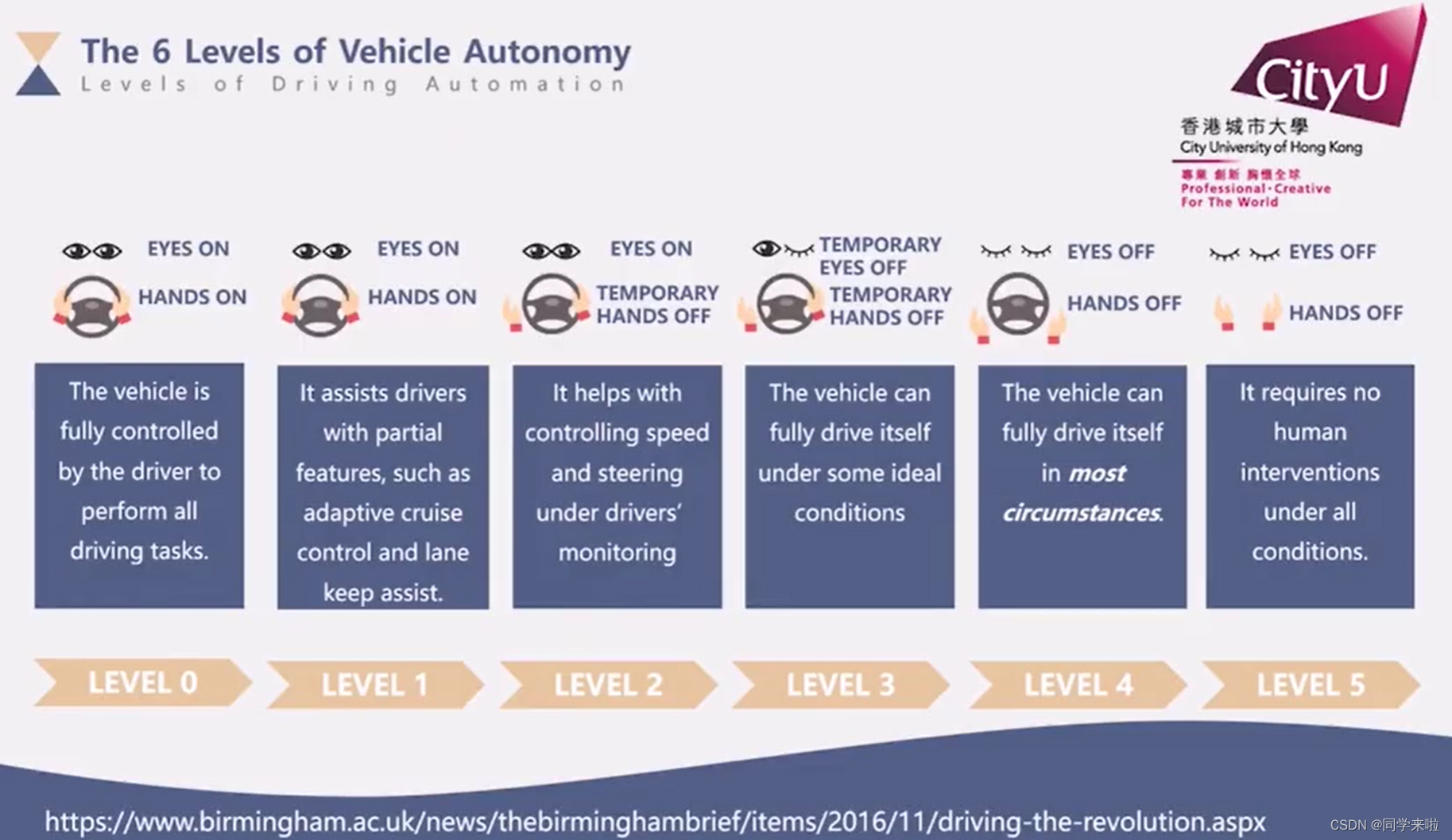
1、自动驾驶级别分类
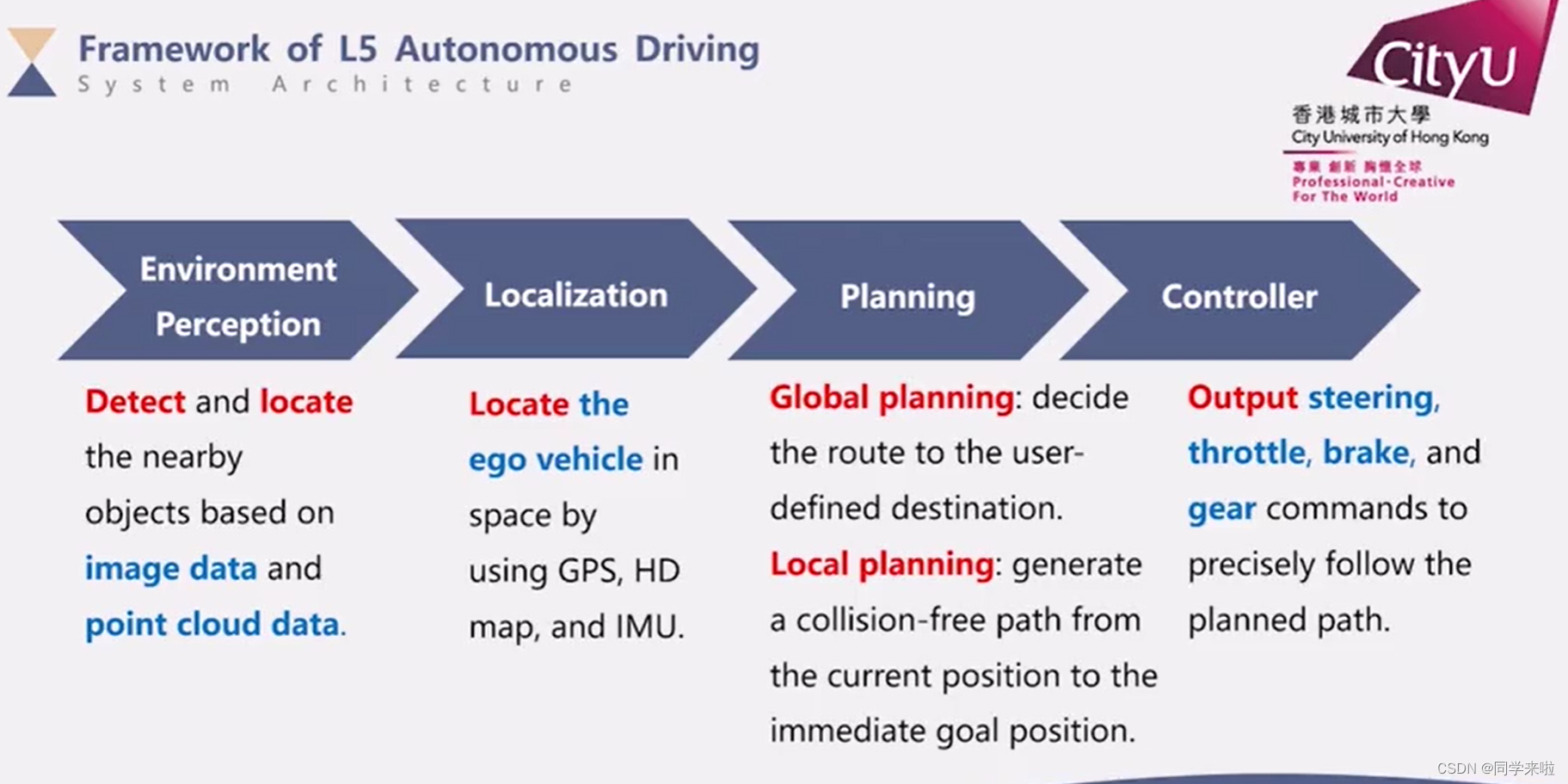
* 2、L5级自动驾驶框架
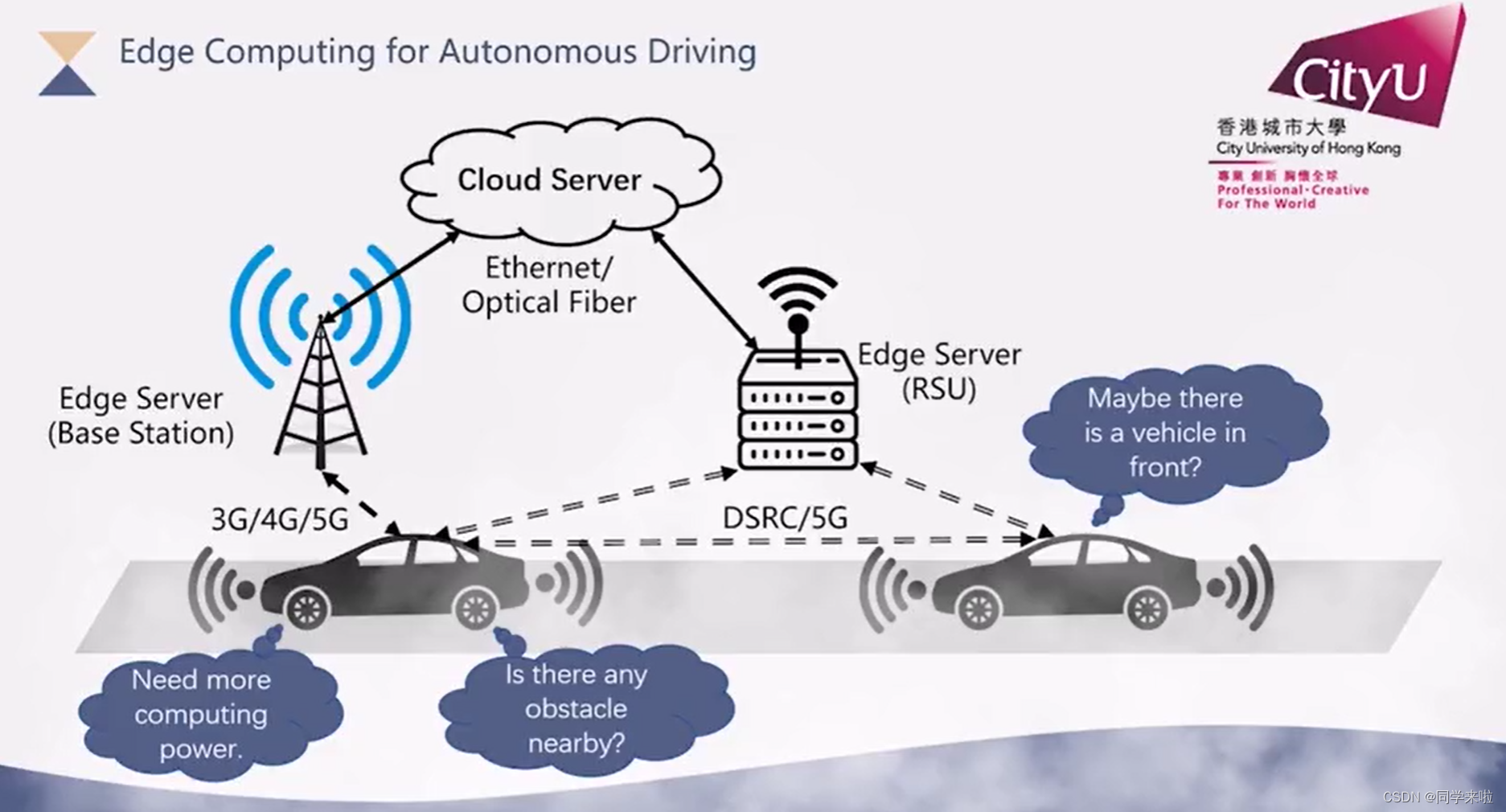
* 3、自动驾驶中的边缘计算
二、最近发展
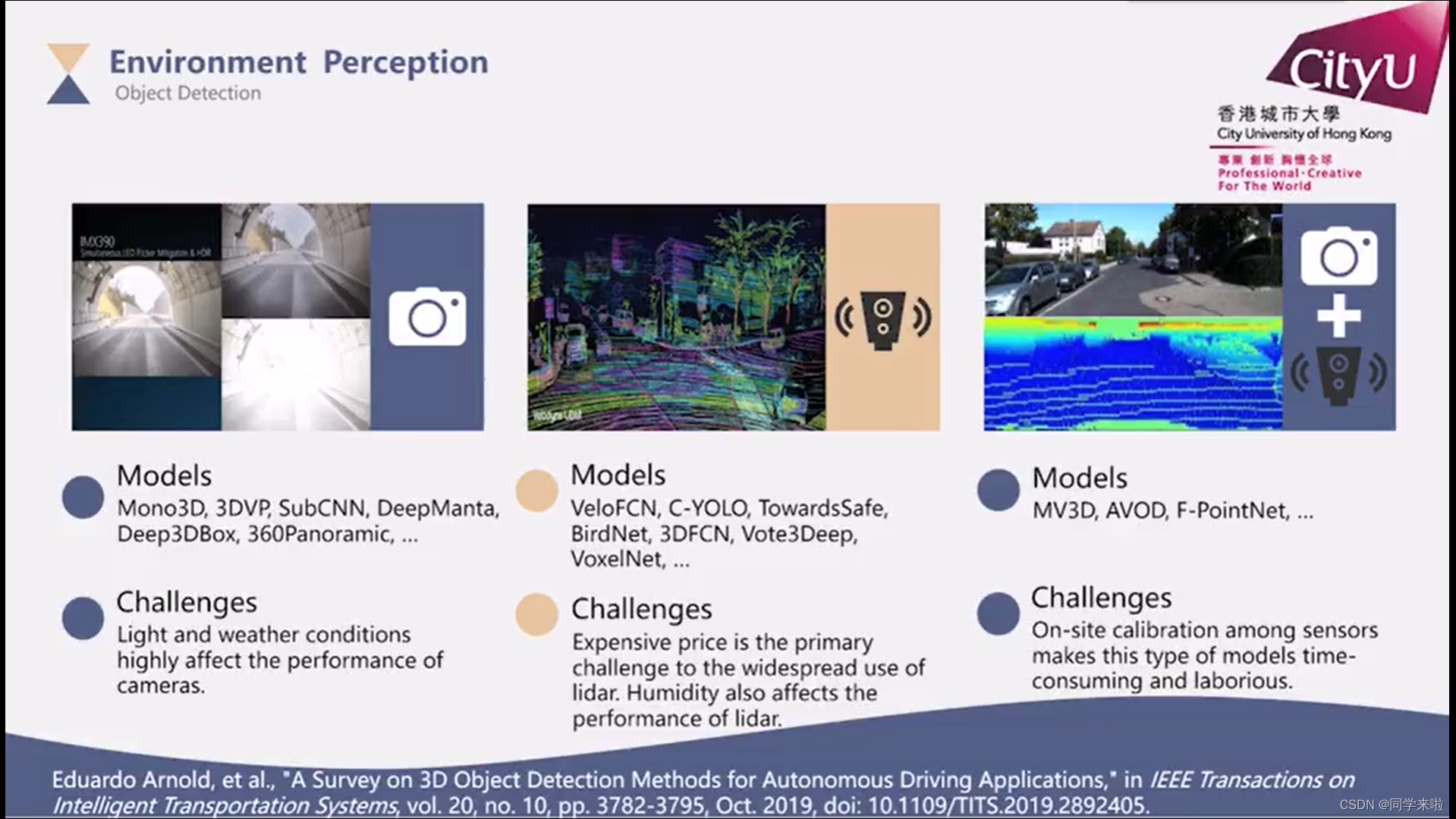
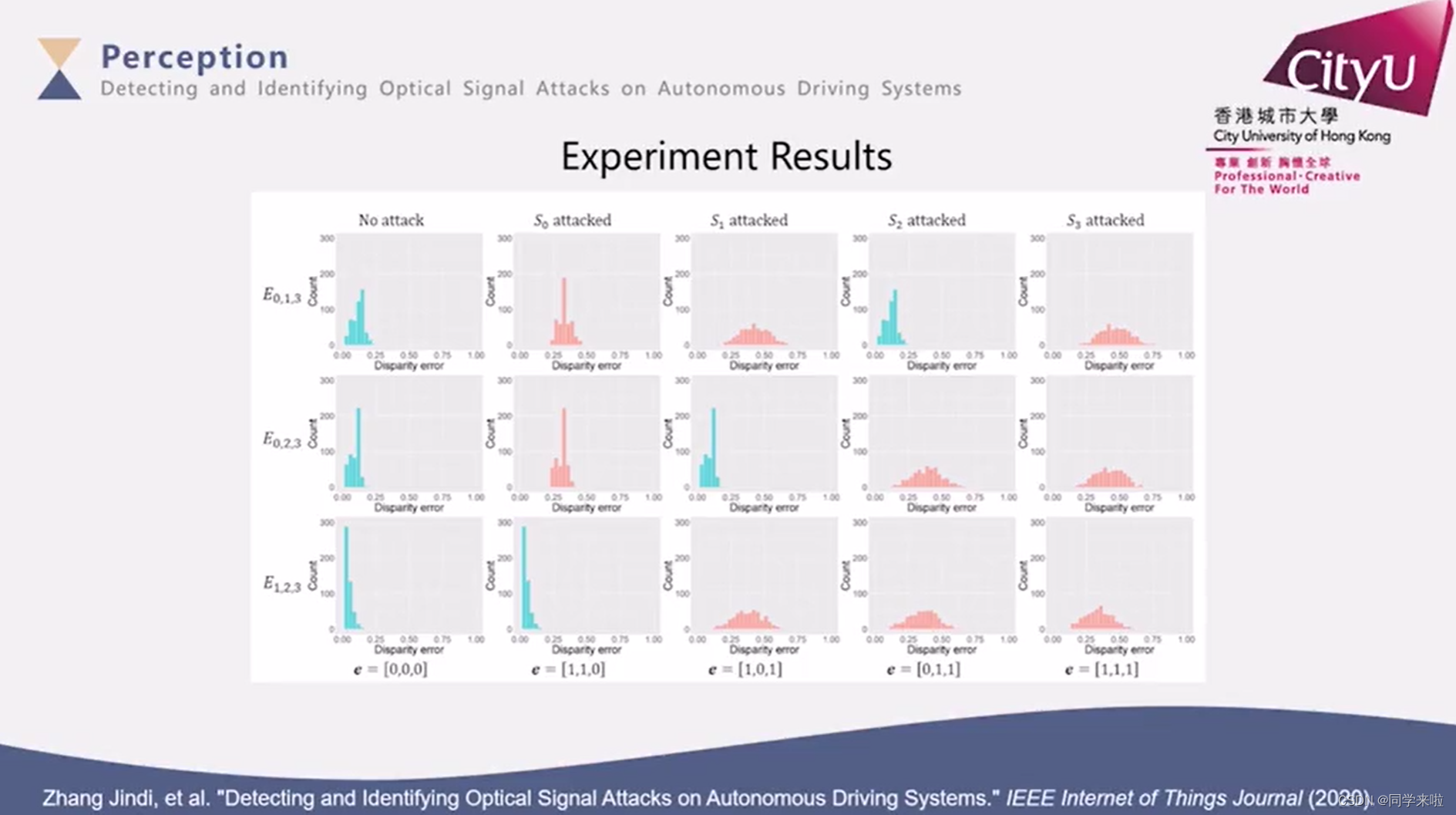
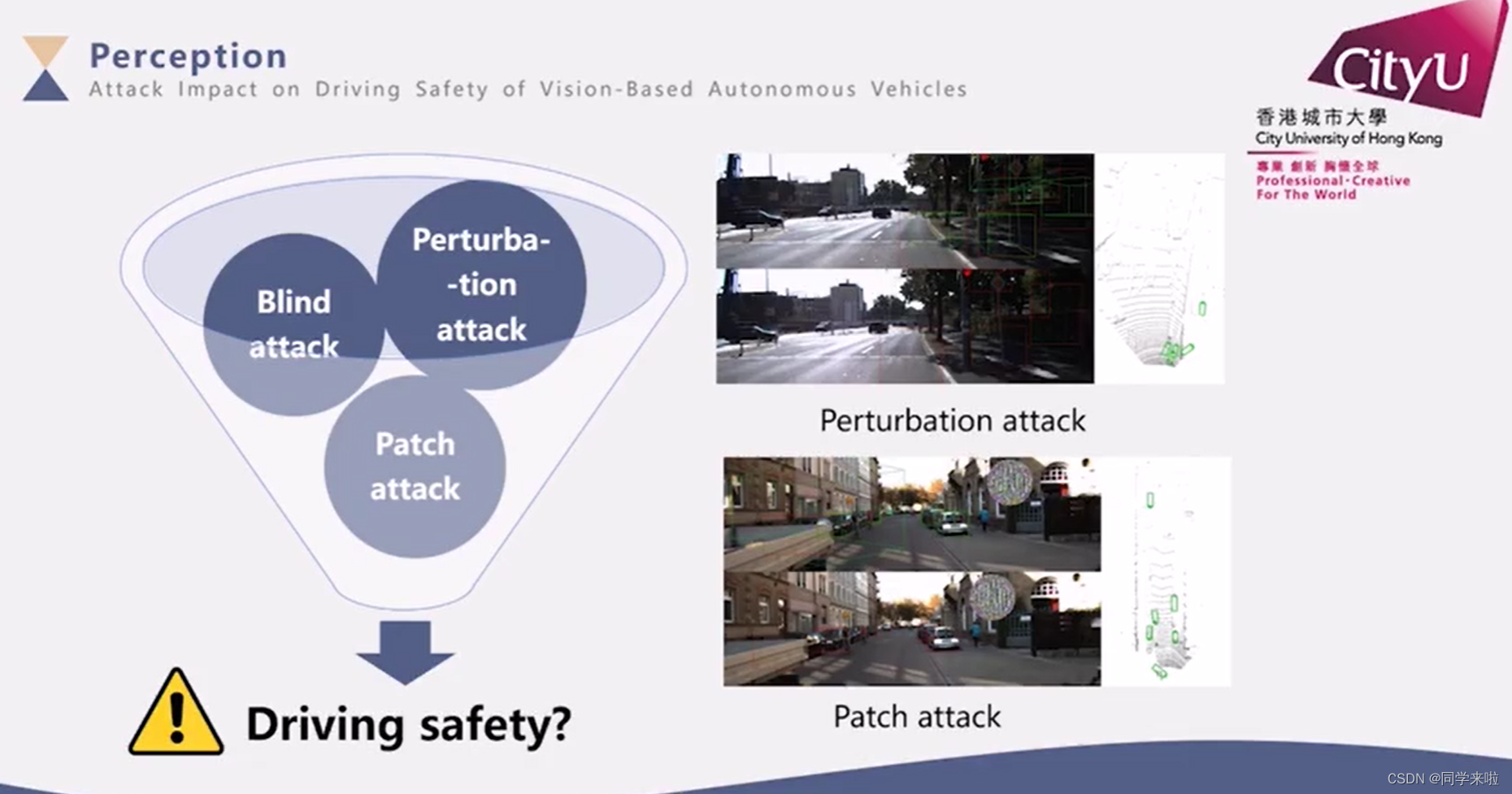
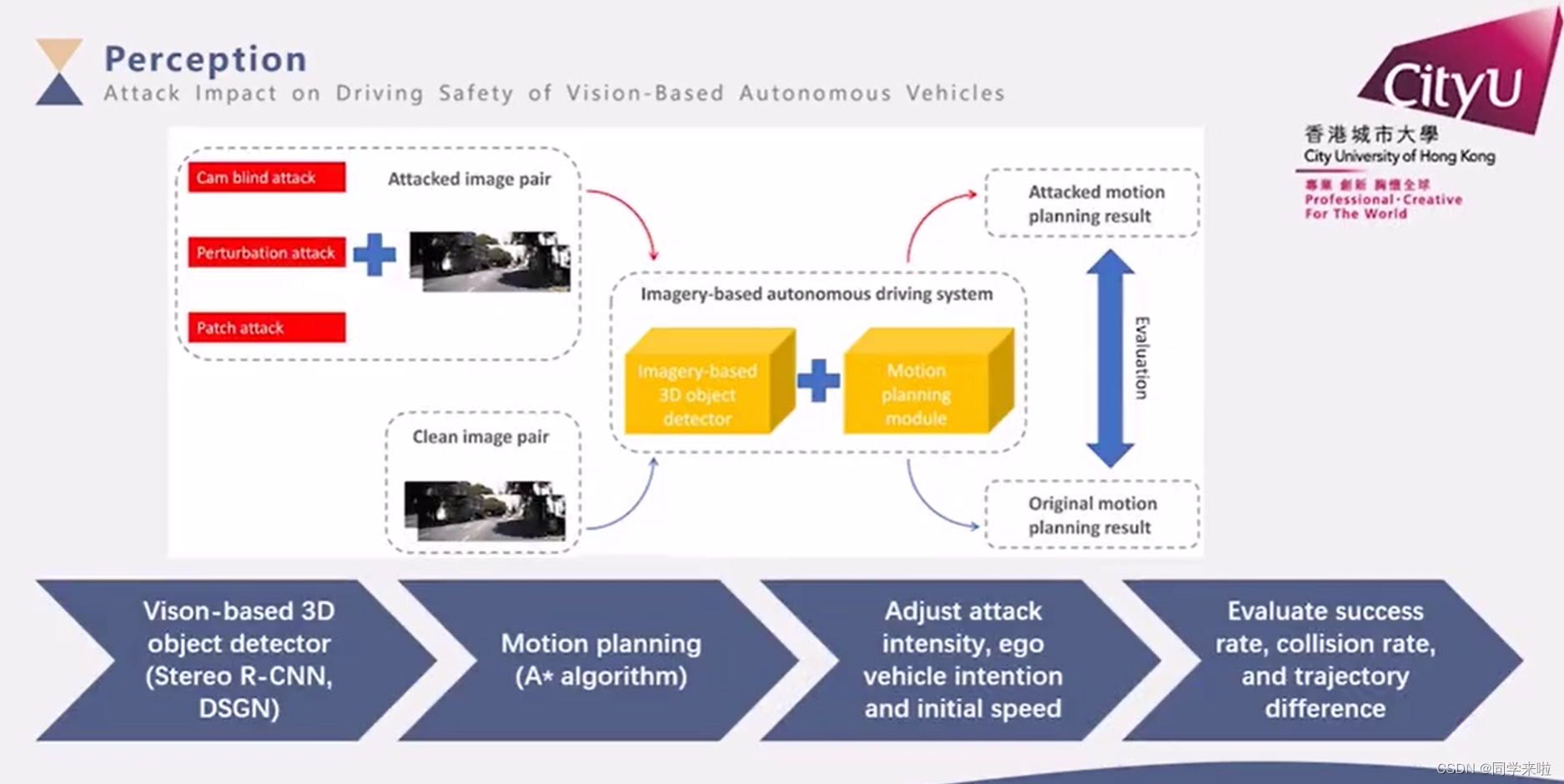
1、环境感知
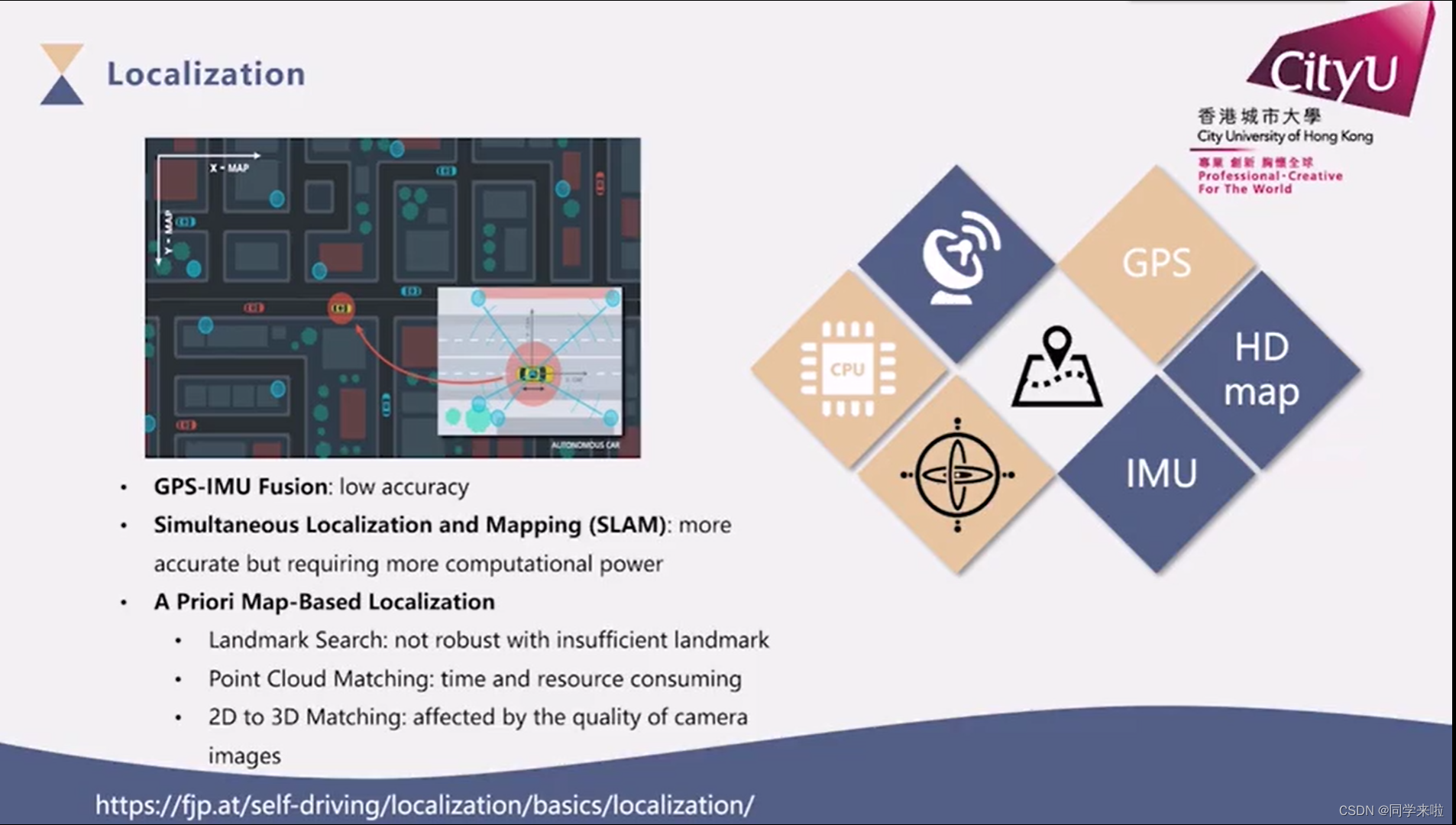
* 2、定位
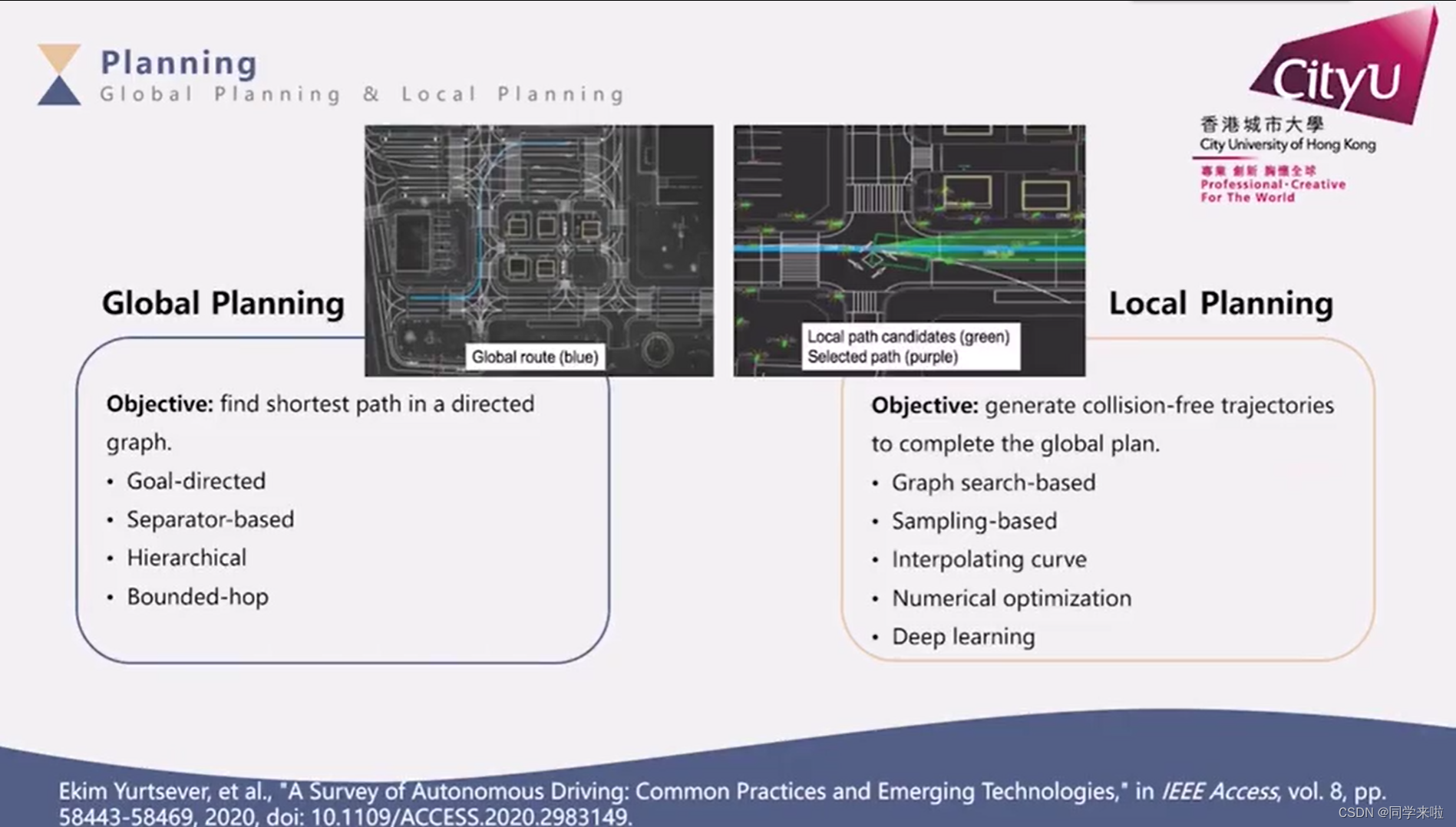
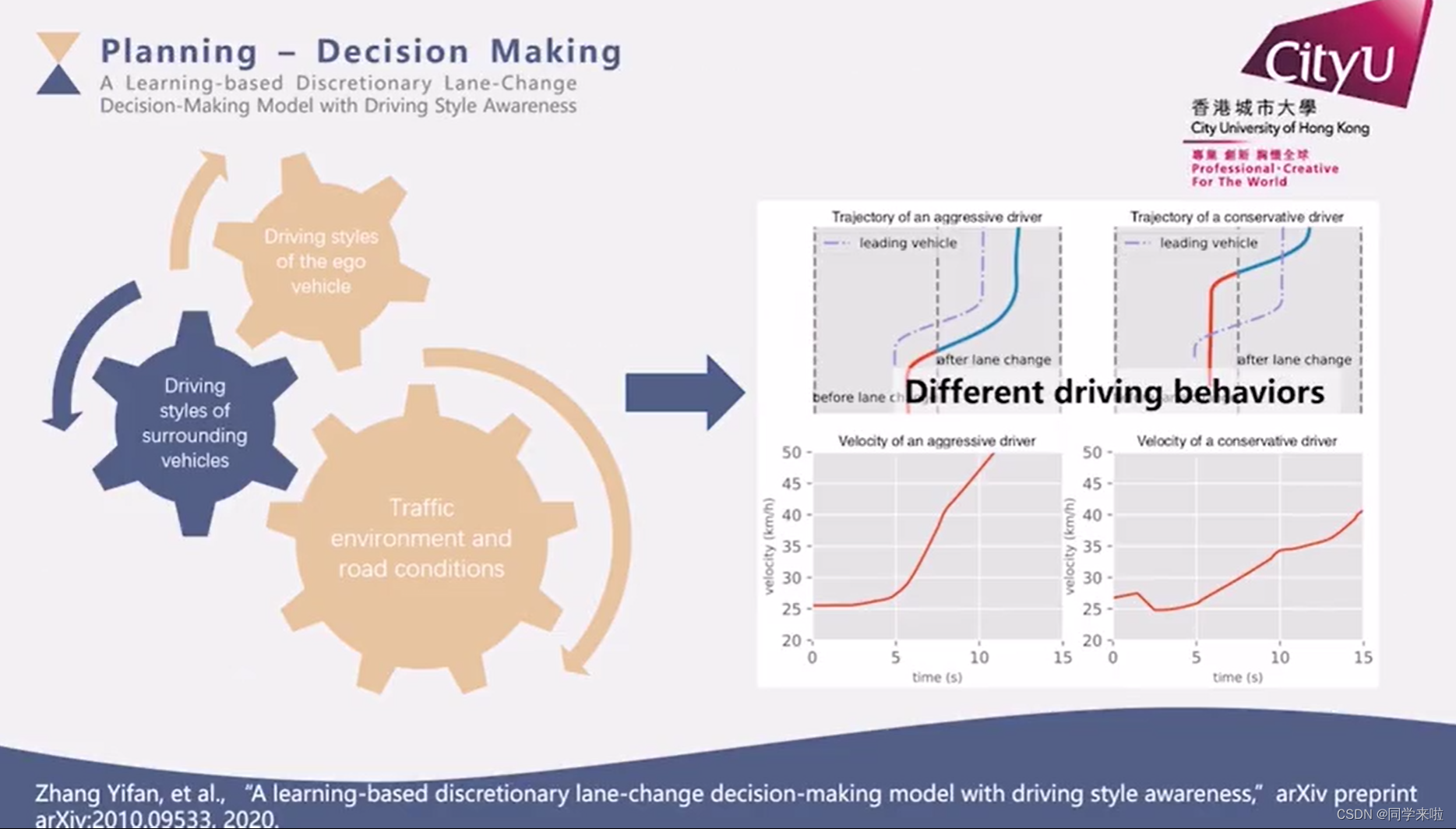
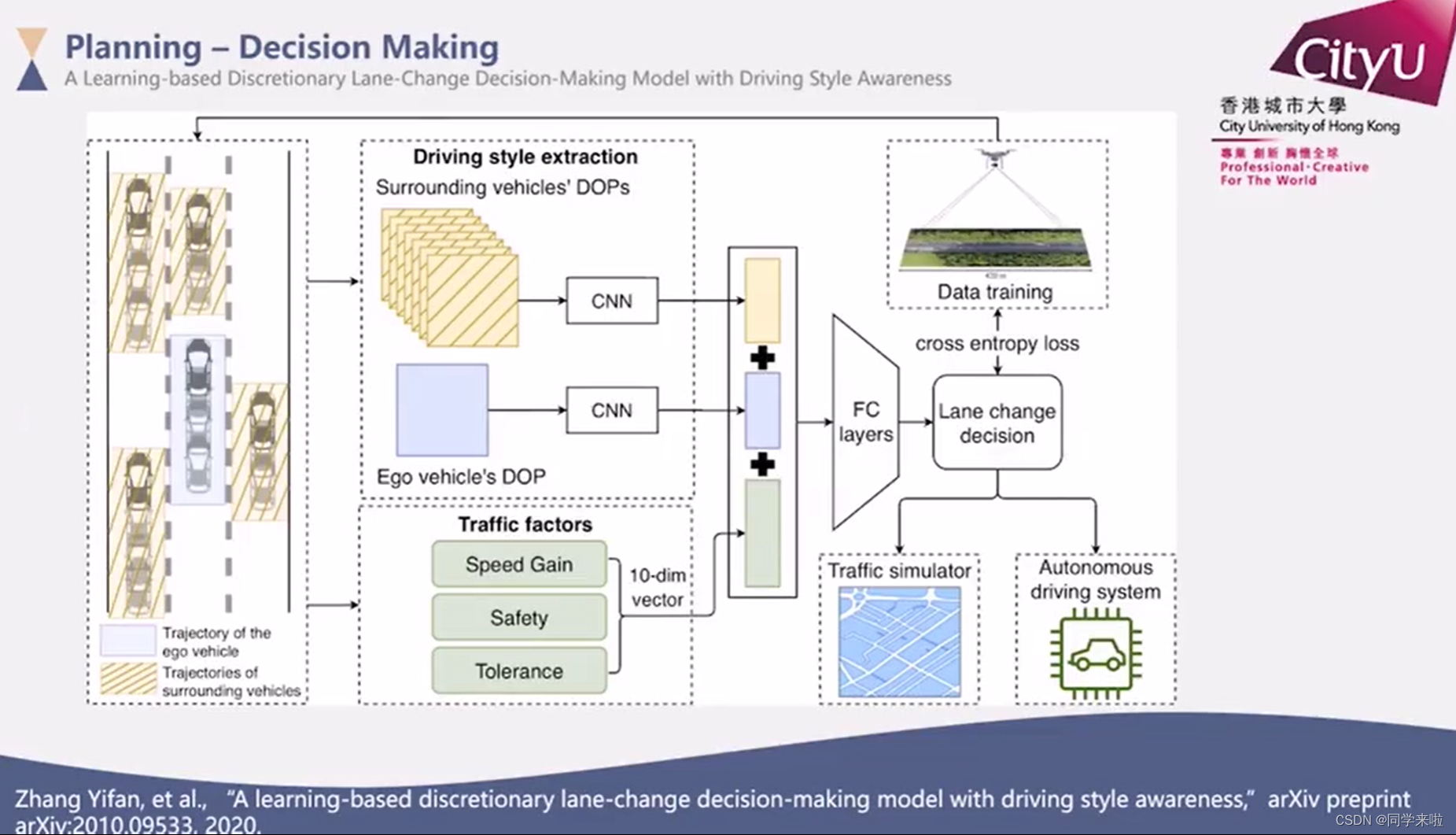
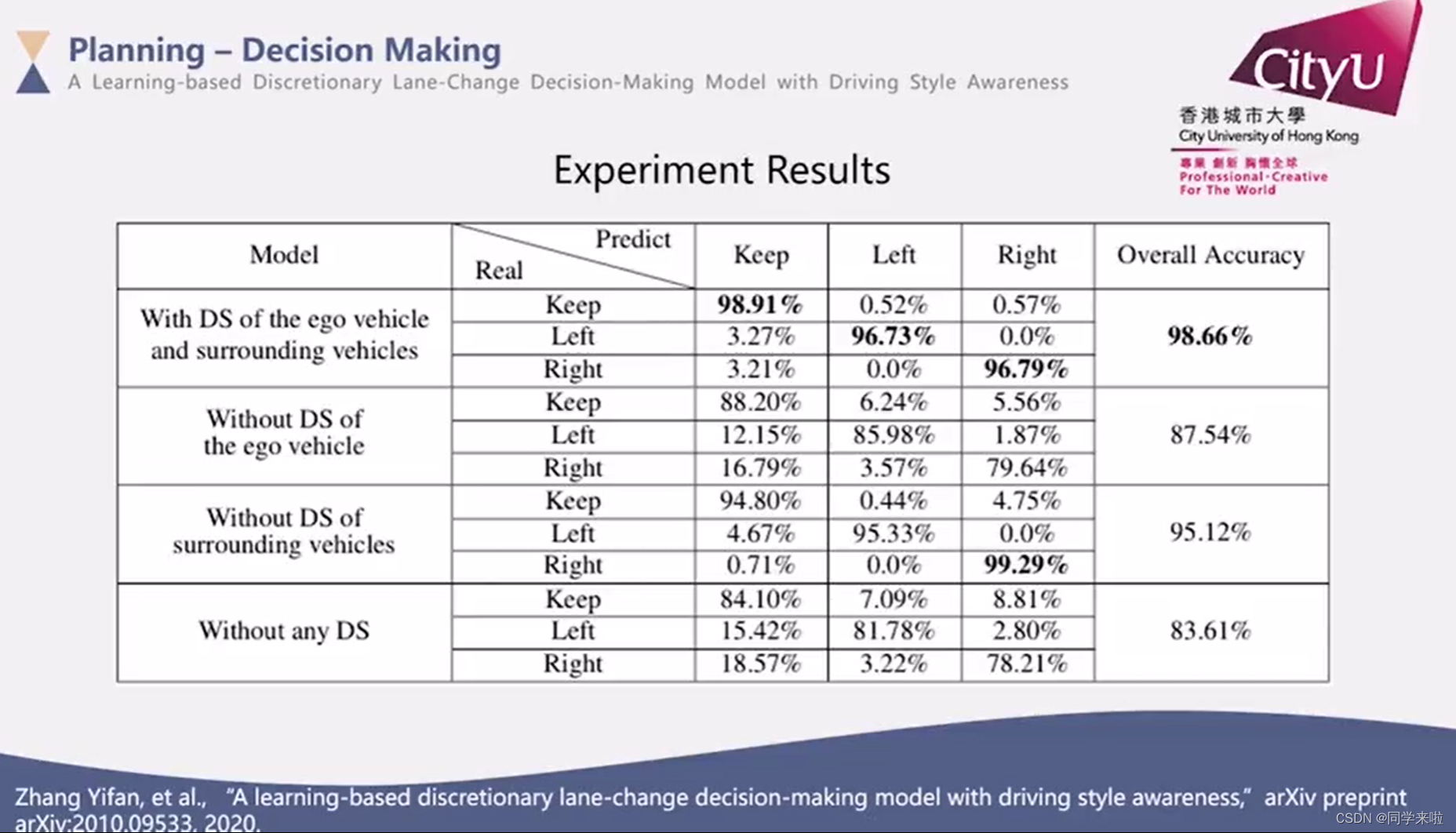
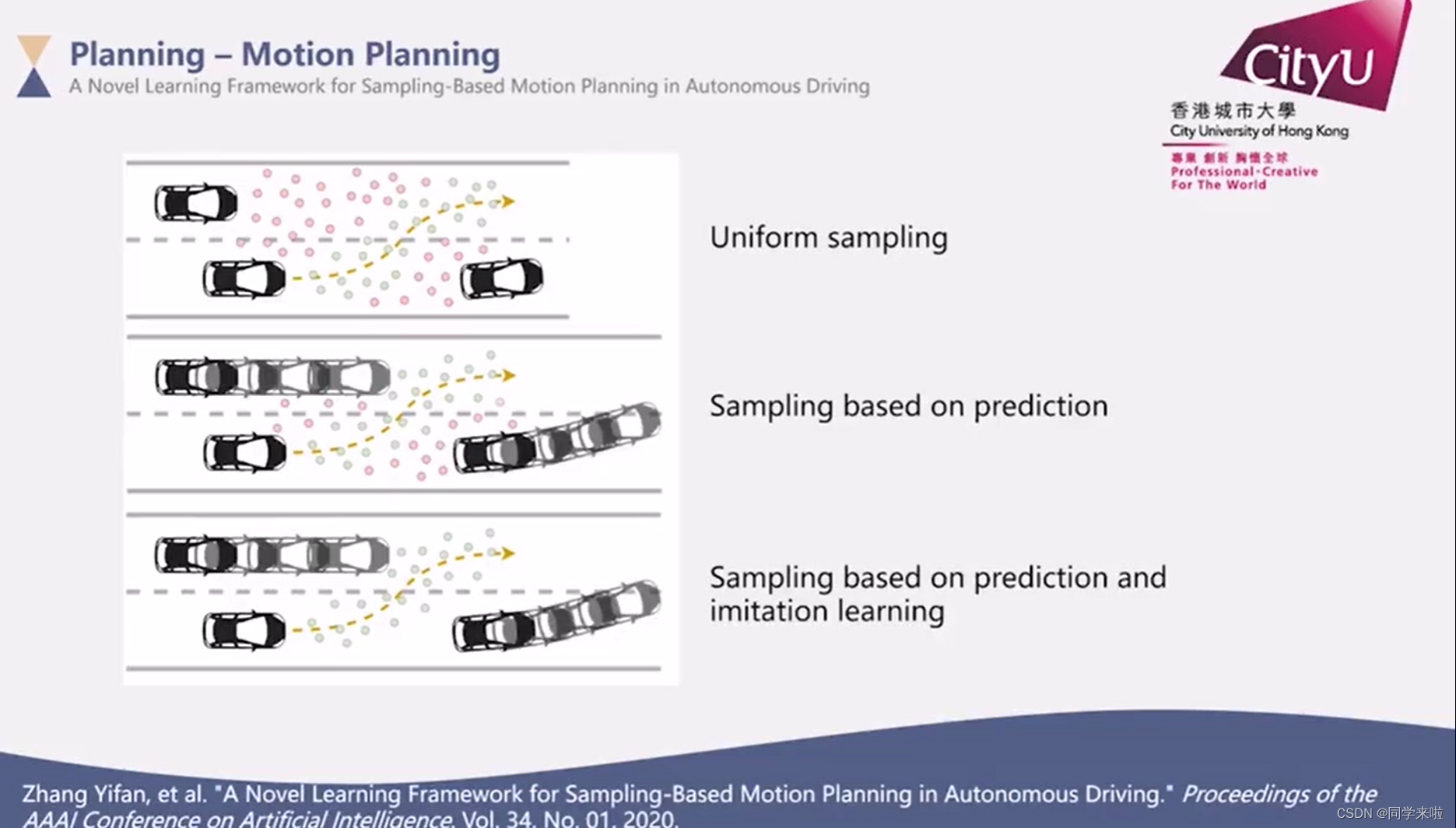
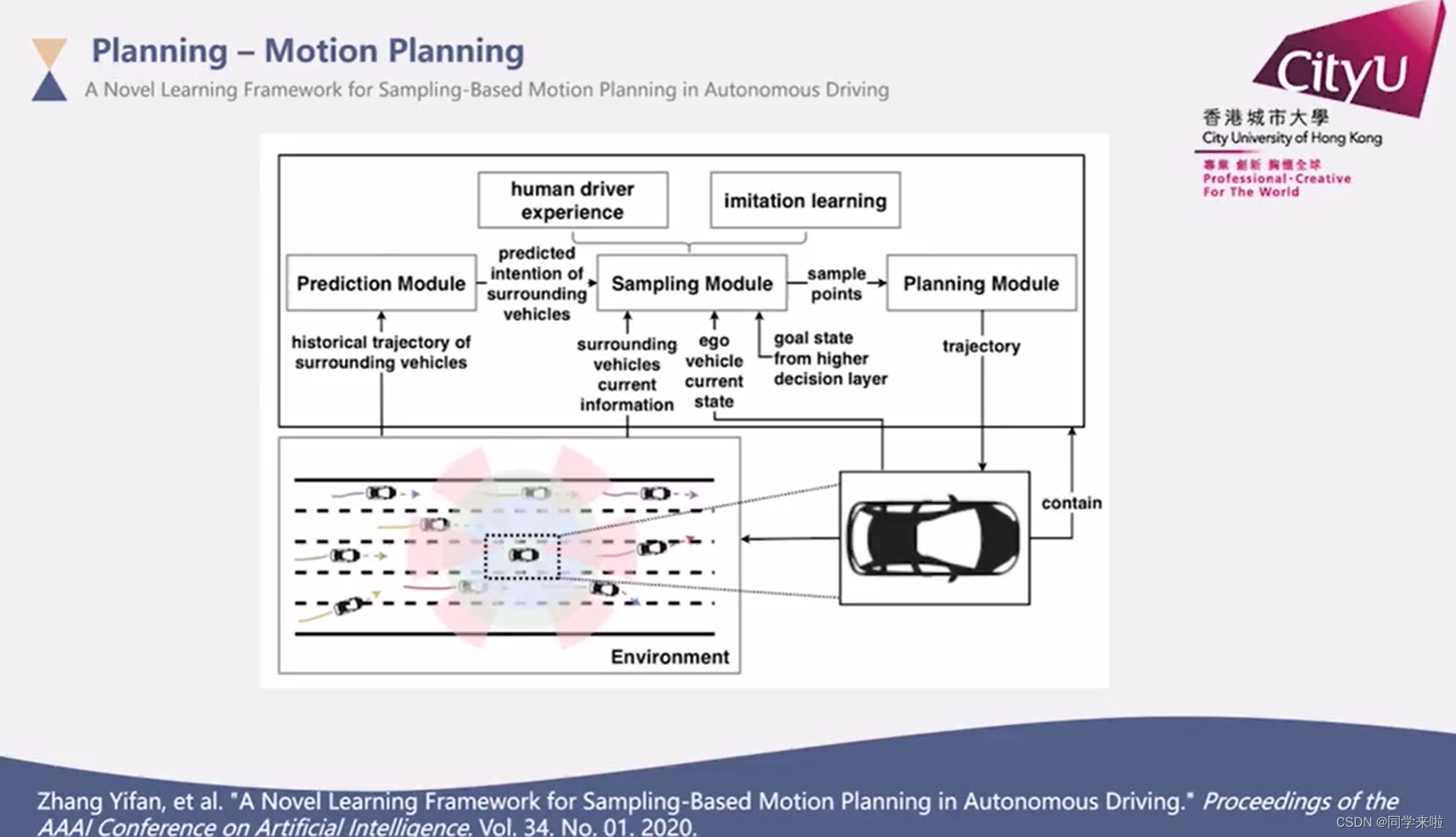
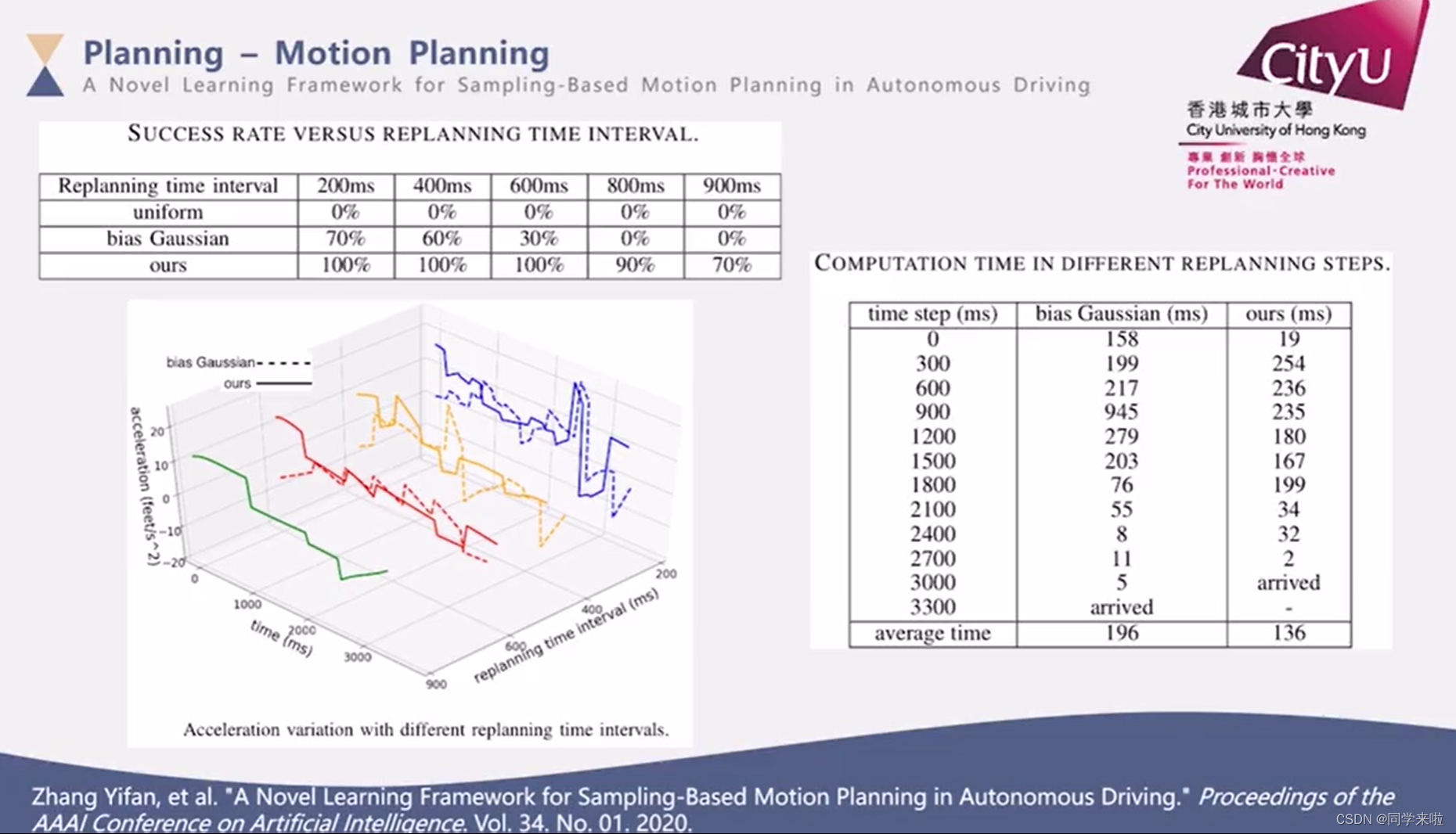
* 3、规划
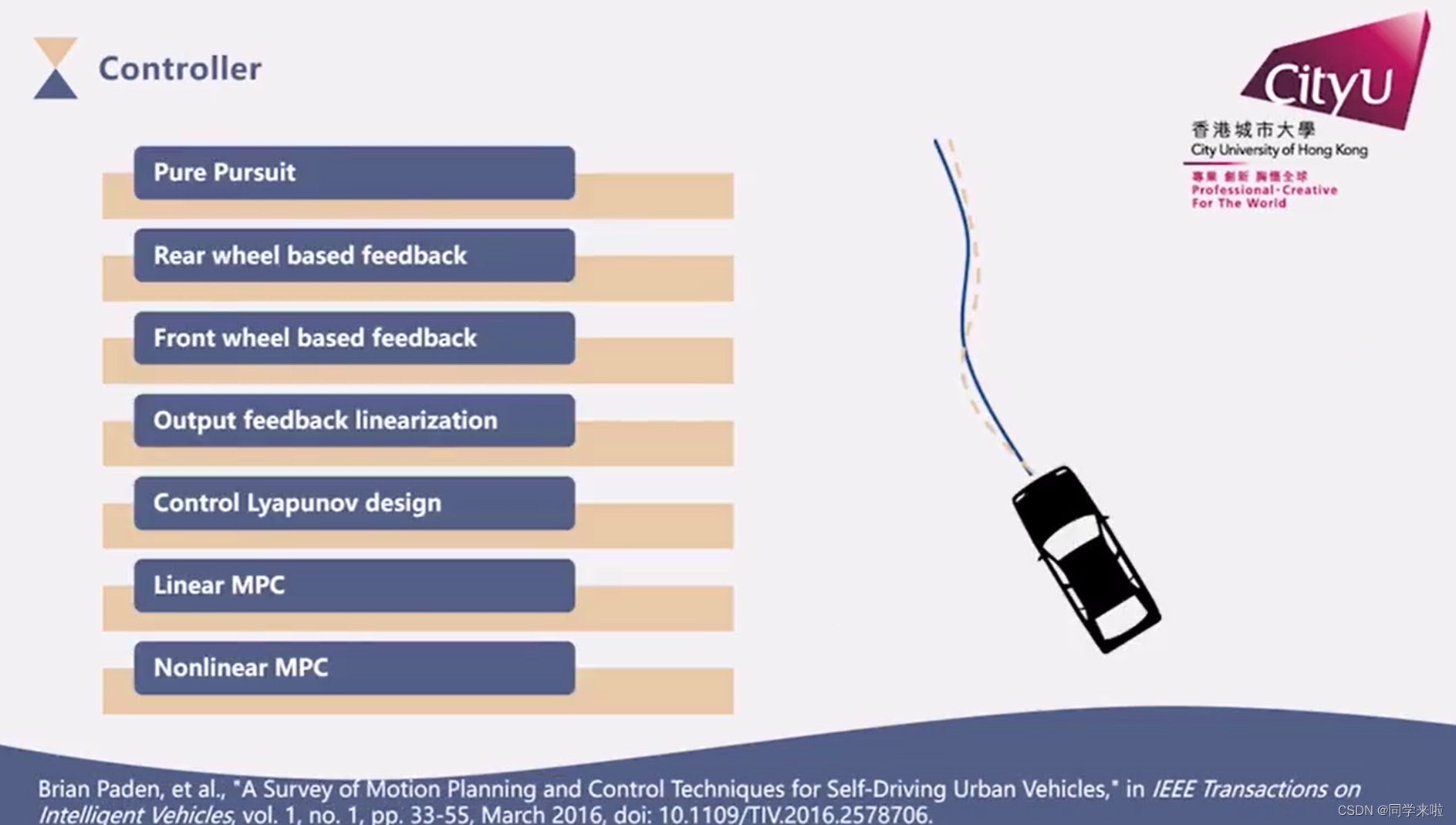
* 4、控制
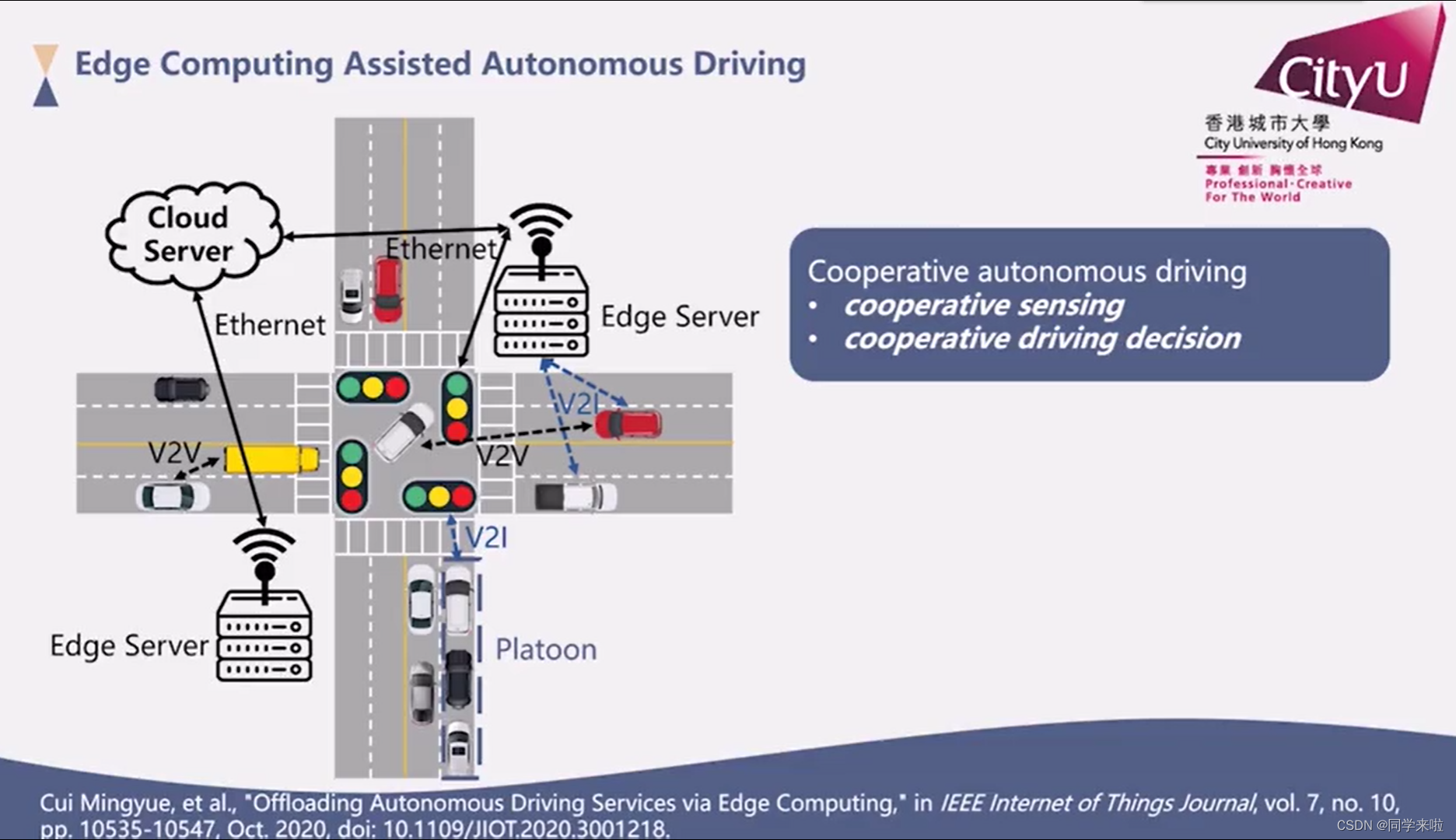
5、边缘计算辅助自动驾驶
三、主要工作内容
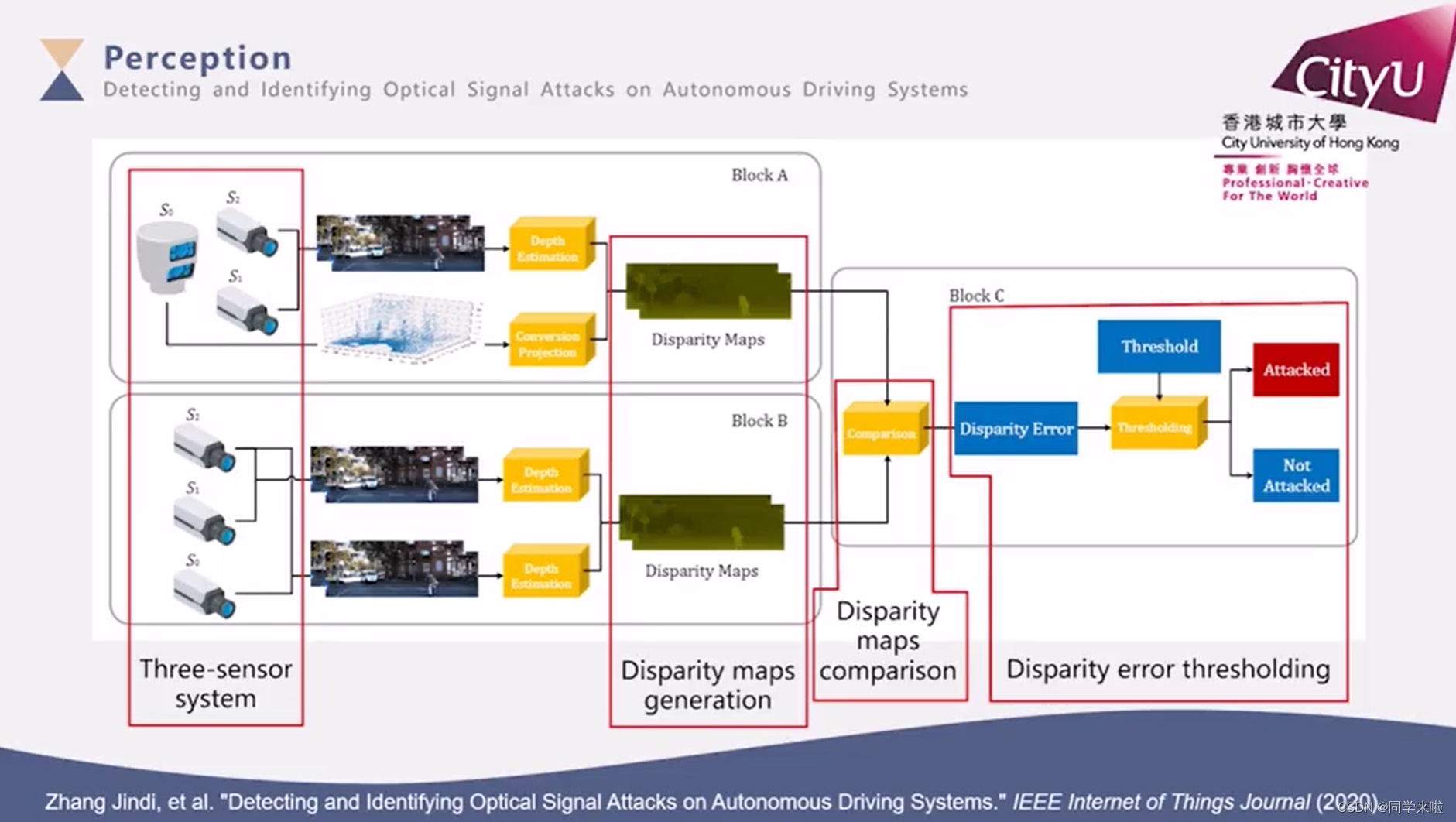
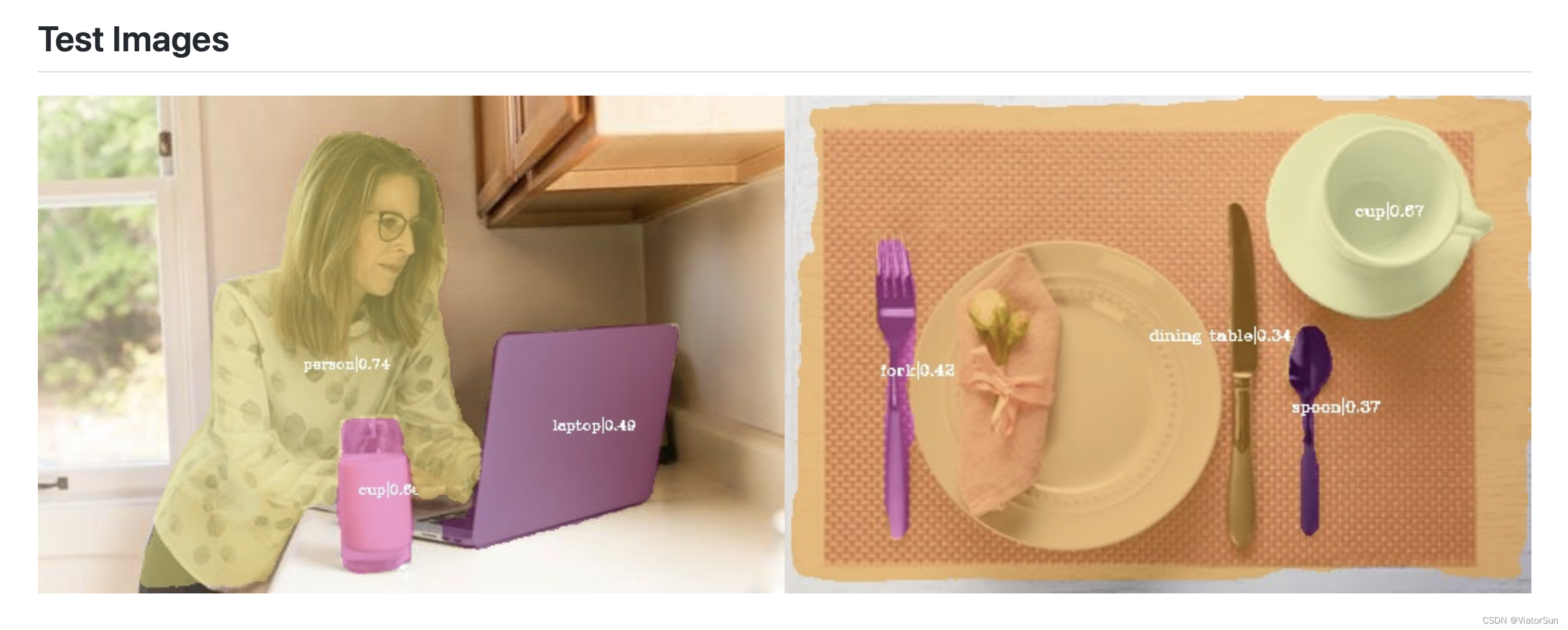
1、环境感知方面

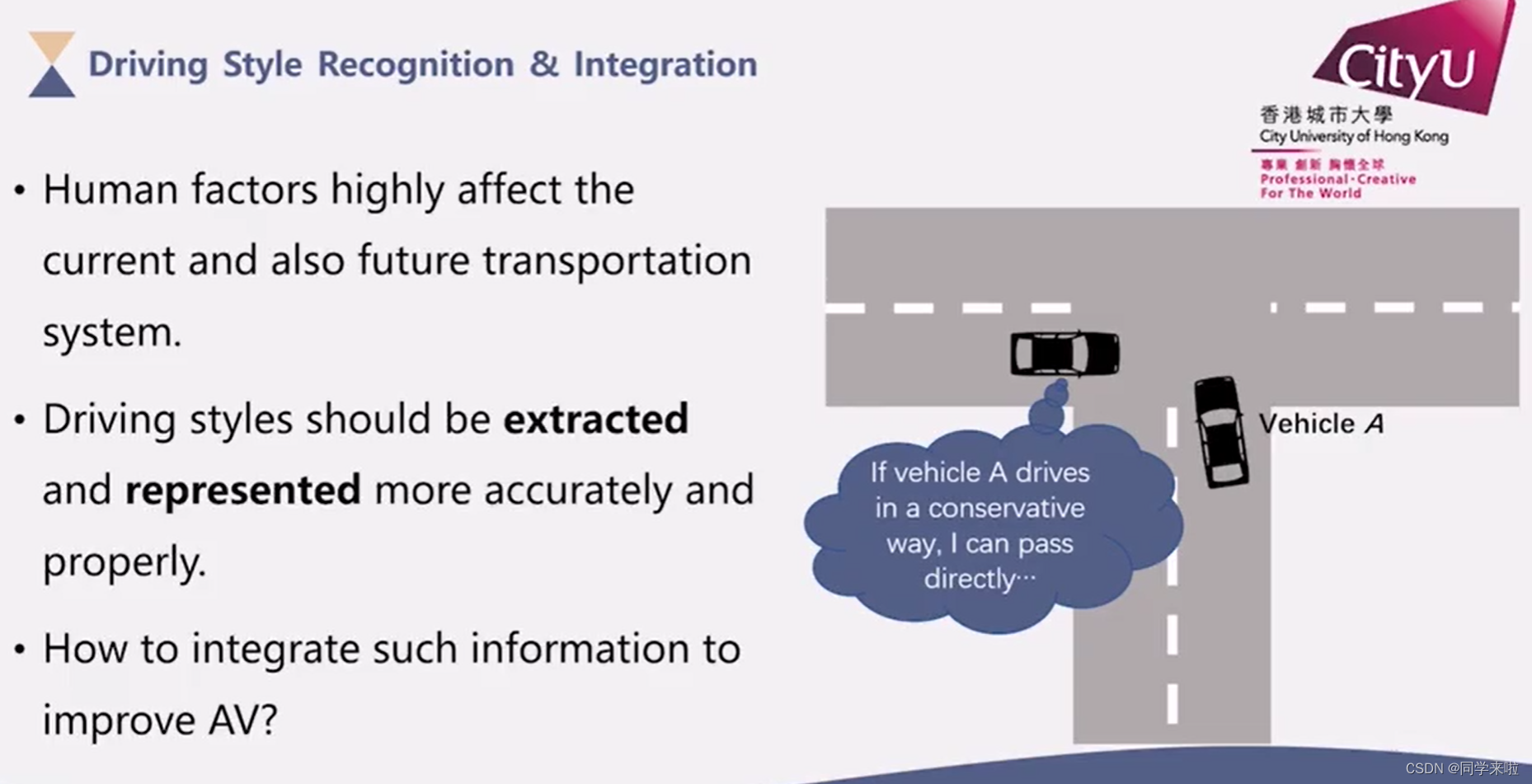
* 2、规划方面
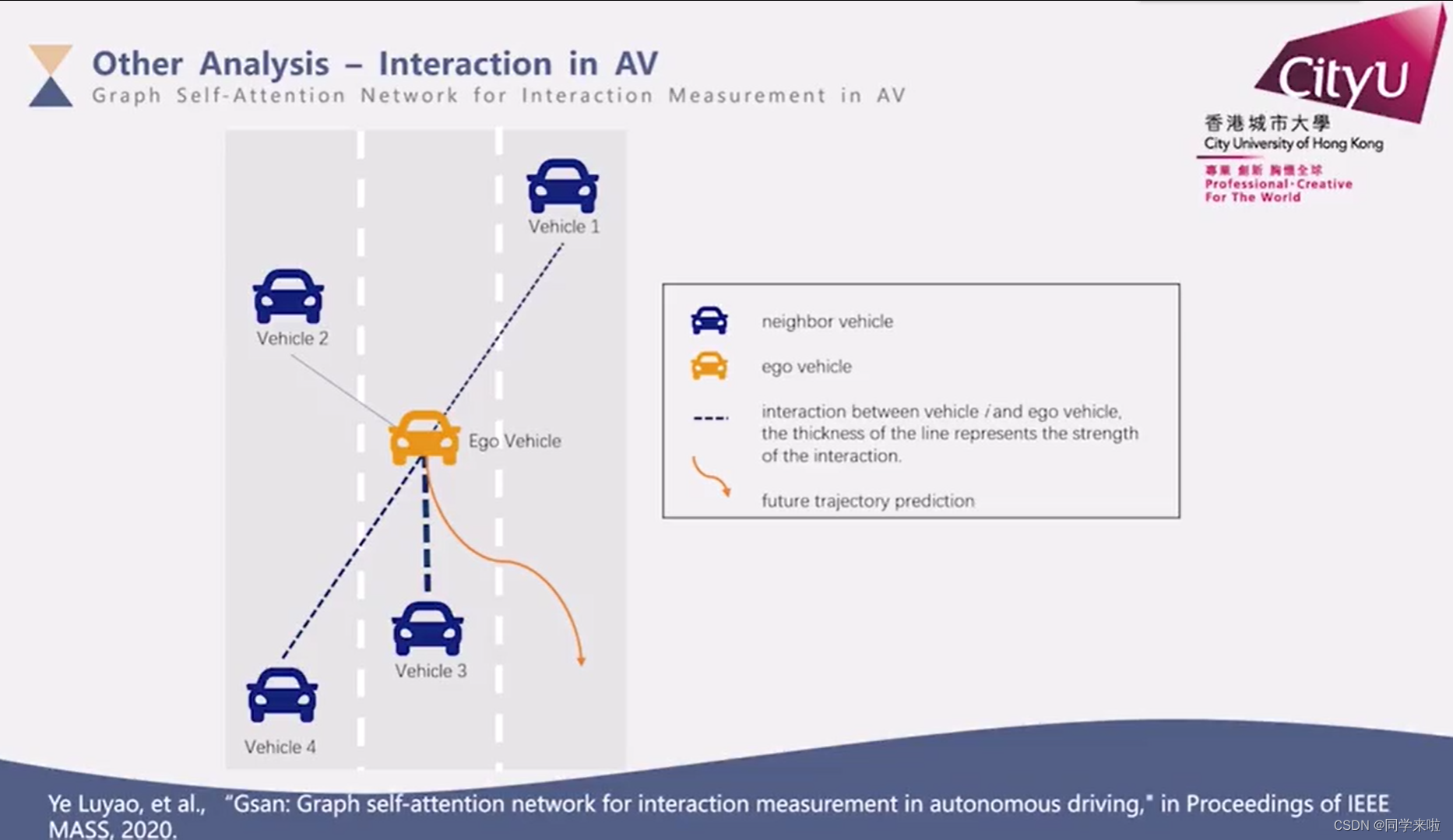
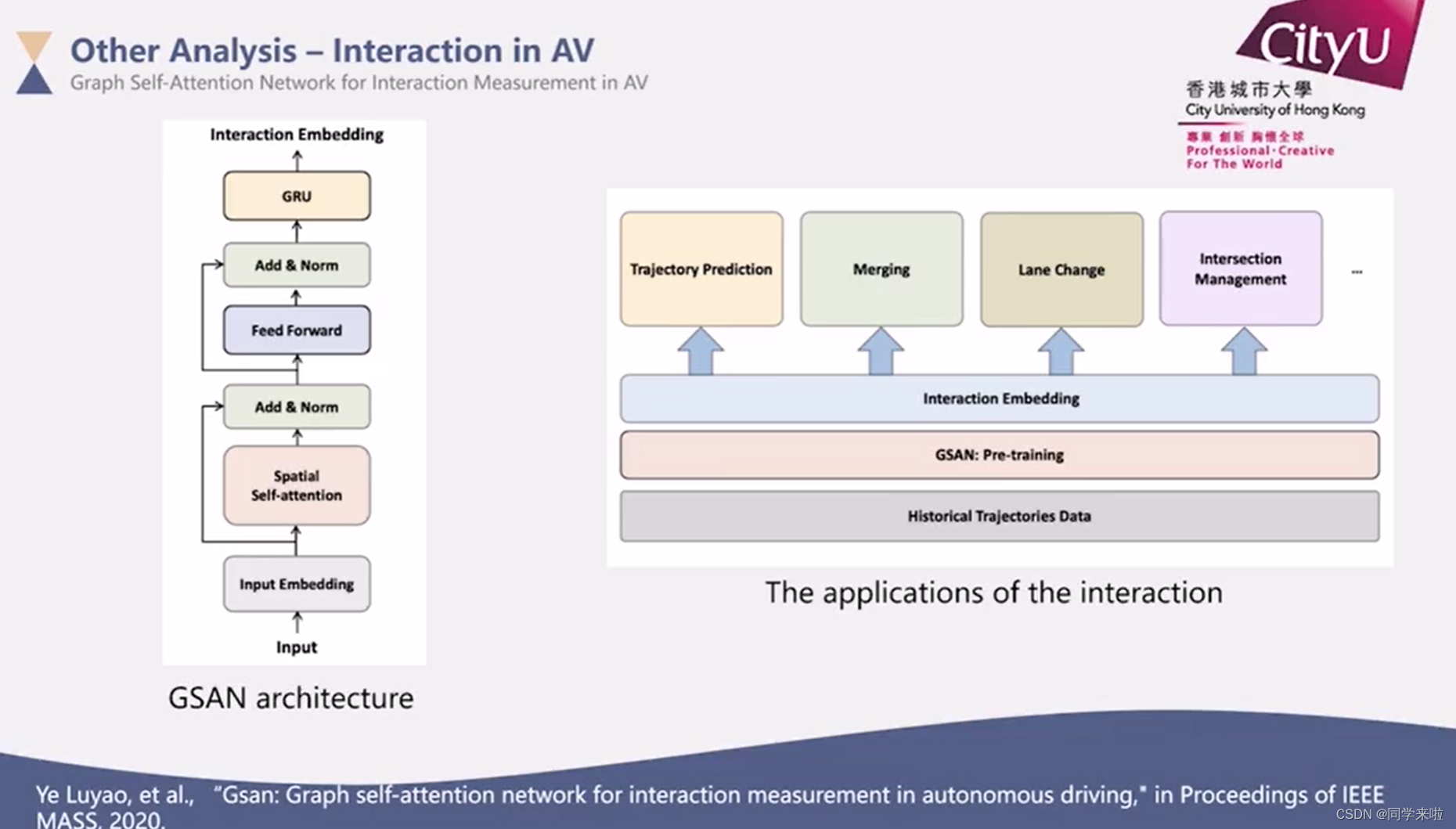
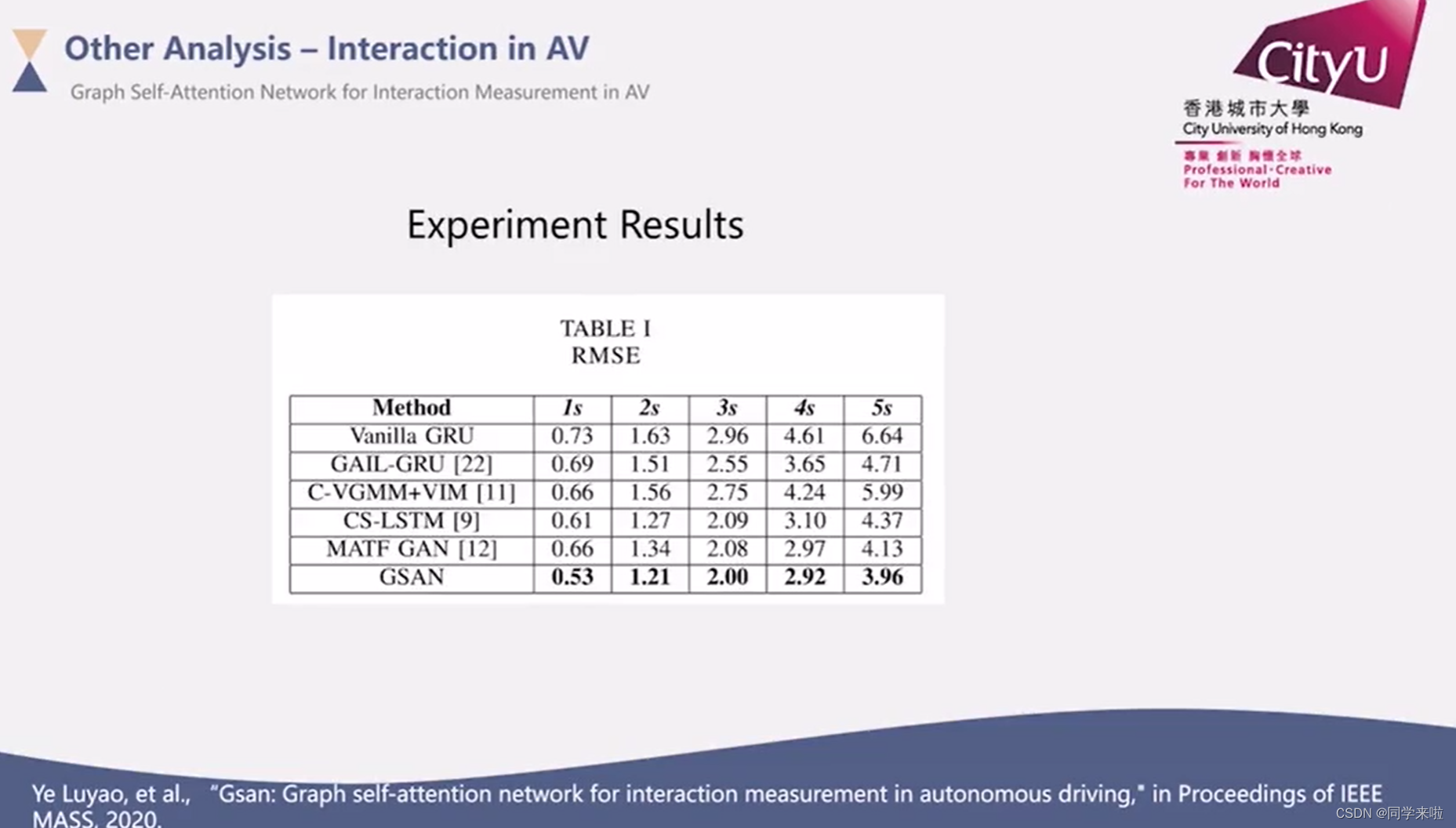
* 3、其他分析
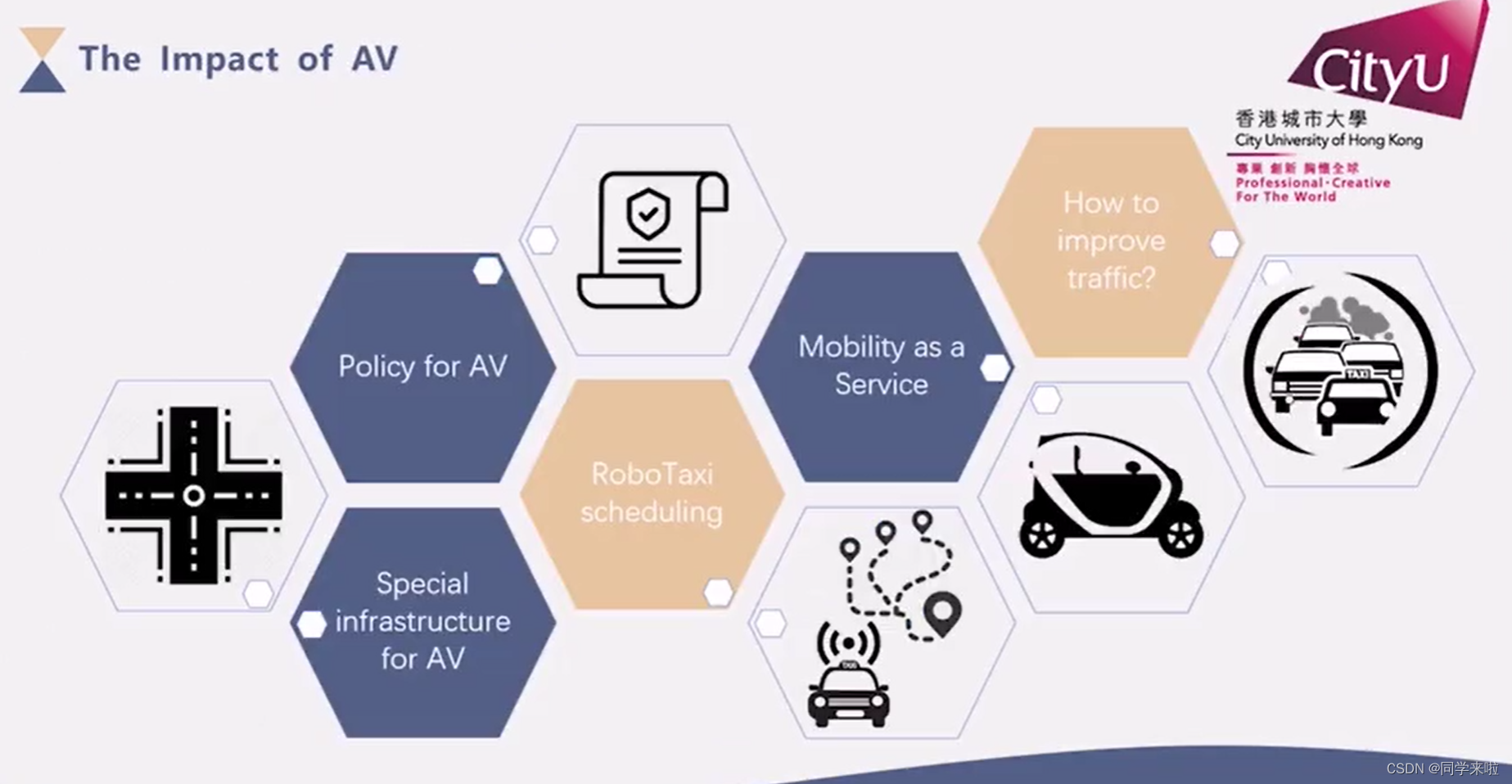
四、未来展望

边栏推荐
猜你喜欢




![[SOC FPGA] peripheral PIO button lights up](/img/34/58728bddbf91eb69e9c0062dbfd531.jpg)
随机推荐
tkinter窗口选择pcd文件并显示点云(open3d)
微信小程序隐藏video标签的进度条组件
Leite smart home longhaiqi: from professional dimming to full house intelligence, 20 years of focus on professional achievements
dolphinscheduler3. X local startup
Abnova循环肿瘤DNA丨全血分离,基因组DNA萃取分析
matlab / ENVI 主成分分析实现及结果分析
Tkinter window selects PCD file and displays point cloud (open3d)
对称的二叉树【树的遍历】
隐马尔科夫模型(HMM)学习笔记
Redis(二)—Redis通用命令
Ant manor safety helmet 7.8 ant manor answer
[FPGA] EEPROM based on I2C
A program lets you understand what static inner classes, local inner classes, and anonymous inner classes are
Niuke Xiaobai monthly race 52 E. sum logarithms in groups (two points & inclusion and exclusion)
Basic DOS commands
Redis (I) -- getting to know redis for the first time
Calculation model FPS
When we talk about immutable infrastructure, what are we talking about
基于FPGA的VGA协议实现
c面试 加密程序:由键盘输入明文,通过加密程序转换成密文并输出到屏幕上。