当前位置:网站首页>Slam interview summary
Slam interview summary
2022-07-07 23:35:00 【Wang bupian】
author : Little grape
link :https://zhuanlan.zhihu.com/p/68858564
source : You know
The copyright belongs to the author . Commercial reprint please contact the author for authorization , Non-commercial reprint please indicate the source .
About the interview question, my target company is a company that makes autonomous driving or robots , The interview of each company is different . One is to let you talk about the project first , Generally speaking, I will ask questions at any time , After that, I will take the basic exam SLAM Problems and algorithms . The other is not to let yourself talk about the project , The interviewer will continue to ask questions in depth according to your resume . Here are some problems I encountered .
1、SLAM What is closed loop detection ? What are the common methods ? Which method do you use ? Is there any innovation ?
2. Explain it. Gauss-Netwon and LM Algorithm .
3. be familiar with Ceres Optimize the library ? The way .
4. describe ( Expand ) Kalman filter and particle filter , Do you have any problems when using Kalman filter ?
5. In addition to visual sensing , Have you ever used other sensors ? such as GPS, Laser radar ...
6. What is tight coupling 、 loose coupling ? Advantages and disadvantages .
7. You think indoor SLAM With autopilot SLAM What's the difference? ?
8. What are the construction methods of map points ?
9. If for a 3D spot , We form 2D Matching between feature points , But there may be a wrong match in this match . How do you build 3D spot ?
10.RANSAC When choosing the best model metric What is it? ?
11. except RANSAC outside , What other methods of robust estimation ? What kinds of robust kernel functions ?
12. 3D How are map points stored ? The way of expression ?
13. Here you are. m The camera n Point bundle adjustment.
14. When we are simulating , In iterations , The pose of the camera will quickly approach the true value . But the map points can't converge quickly. Why ?
15. LM The one in the algorithm How did it change ?
16. The way 3D How to express the position and posture of space ? The relationship between Lie groups and Lie algebras .
17. Derivation ( Partial Guide R1R2/ Partial Guide R1)
18. To give you one H high W Wide image or matrix, Ask how to access each element , First visit the line ? First access the column ? Tips : It has something to do with caching ~
19. Write the projection model of monocular camera , Distortion model .
20. Say something you are familiar with SLAM Algorithm ,Lidar/Visual slam, Say advantages and disadvantages .
21. read Maplab, Design the method of map updating of indoor service robot 、 technological process .
22. install 2D lidar When the platform rotates at a uniform speed , Remove laser data distortion , Write code to two groups that have already matched 3D spot , Calculate the relative pose transformation . Known matching ICP problem , Write code .
23. ORB-SLAM Why should we calculate at the same time when initializing H Matrix and F matrix ?
24. The way Dog-Leg Algorithm what is marginalization ?
25. First Estimate Jacobian? Uniformity ? Observability ?
26. The way VINS-Mono Advantages and disadvantages
27. What is the difference in the nature of the work you do , contribution , Where is the essence of innovation ?
28. What is? Essential,Fundamental matrix ? Given several consecutive frames with pose , How to measure the coordinates of the lane line relative to the world coordinate system .
29. Given some noisy GPS How to accurately locate signals ?
30. How to calibrate IMU External parameters between and camera ? Here you are. xx Error GPS, Here you are. xx How can you get an inertial navigation error cm Level map .
31. Calculation H Matrix and F What's the skill of matrix ? Actually, I'm asking about the operation of normalization .
32. Give a group of clouds , Extract the plane .
33. Give me a picture , Know the relative relationship between the camera and the ground , Calculate the top view of the figure .
34. How to do bilinear difference , Write the formula .
35. RGB-D Of SLAM and RGB Of SLAM What's the difference? ?
36. The robot starts from the entrance of the supermarket , Go to 3 Delivery in the community kilometers away . Please design a positioning system , Including the configuration of sensors 、 Algorithm flow , Write it in pseudocode .
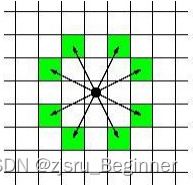
37. What is? ORB features ,ORB How to do the rotation invariance of features ,BRIEF How operators are extracted .
38. If you remove distortion from an image , Write the formula , technological process .
39. ORB-SLAM How to extract features in ? How to homogenize ?
Data structure part
40. Algorithm data structure &C++ORB-SLAM What is the structure of the common view of ? How is it stored internally ?
41. Write a quadtree structure
42. No need to recursively traverse the binary tree
43. Find the most common domain
44. Implementation of multithreading
45. The way std::vector Describe the , How to dynamically expand , how shink Memory
46. Eigen Is row priority or column priority
47. unorder Container and ordered The difference between containers
48. The way Mat How to deconstruct
49. Talk about smart pointers ,shared_ptr And unique_ptr
50. Let's talk about what virtual functions are
51. How to realize the function that only one pointer can point to a piece of memory with ordinary pointer
52. C++ RTTI What is it? ?
53. C++ How to achieve polymorphism ?
54. vector Of iterator When will it fail ?
55. Reconstruction of binary tree
56. Write CmakeLists.txt, Write gcc Instructions
57. A picture , Give two pairs of nodes , Find the path between two nodes .
58. Implement a sparse matrix data structure , And realize the addition of sparse matrix .
59. Chessboard , There is a light on each corner of the grid , Press the four lights around and it will turn upside down . At the beginning, the light state on this chessboard is random , Ask how to operate these buttons to make the whole chessboard disappear .
60. Make up a binary search
61. Give you an array to sort , Say sorting algorithm
62. Here you are. 2D Two segments of the plane , Judge whether two line segments intersect
63. Write quick sort 、 Write reverse linked list
64. Give two sorted arrays , ascend . One size is n, One size is m. Find out the second k Small numbers .
If you have time, you'd better put the basic SLAM The algorithm is implemented by itself , such as PnP、ICP、BA etc. ; Multi brush basic algorithm problem .
边栏推荐
- B_ QuRT_ User_ Guide(40)
- POJ2392 SpaceElevator [DP]
- LM12丨Rolling Heikin Ashi二重K线滤波器
- B_QuRT_User_Guide(37)
- Unity3d Learning Notes 6 - GPU instantiation (1)
- C # exchange number, judge to pass the exam
- B_ QuRT_ User_ Guide(37)
- Anxinco esp32-a1s development board is adapted to Baidu dueros routine to realize online voice function
- Flash encryption process and implementation of esp32
- B_QuRT_User_Guide(36)
猜你喜欢


随机推荐
MySQL Index Optimization Practice II
Three questions TDM
As a new force, chenglian premium products was initially injected, and the shares of relevant listed companies rose 150% in response
[stm32+esp8266 connects to Tencent cloud IOT development platform 3] stm32+esp8266-01s dynamically registers devices on Tencent cloud (at instruction mode) -- with source code
The efficient s2b2c e-commerce system helps electronic material enterprises improve their adaptability in this way
B_ QuRT_ User_ Guide(38)
Turbo introder common scripts
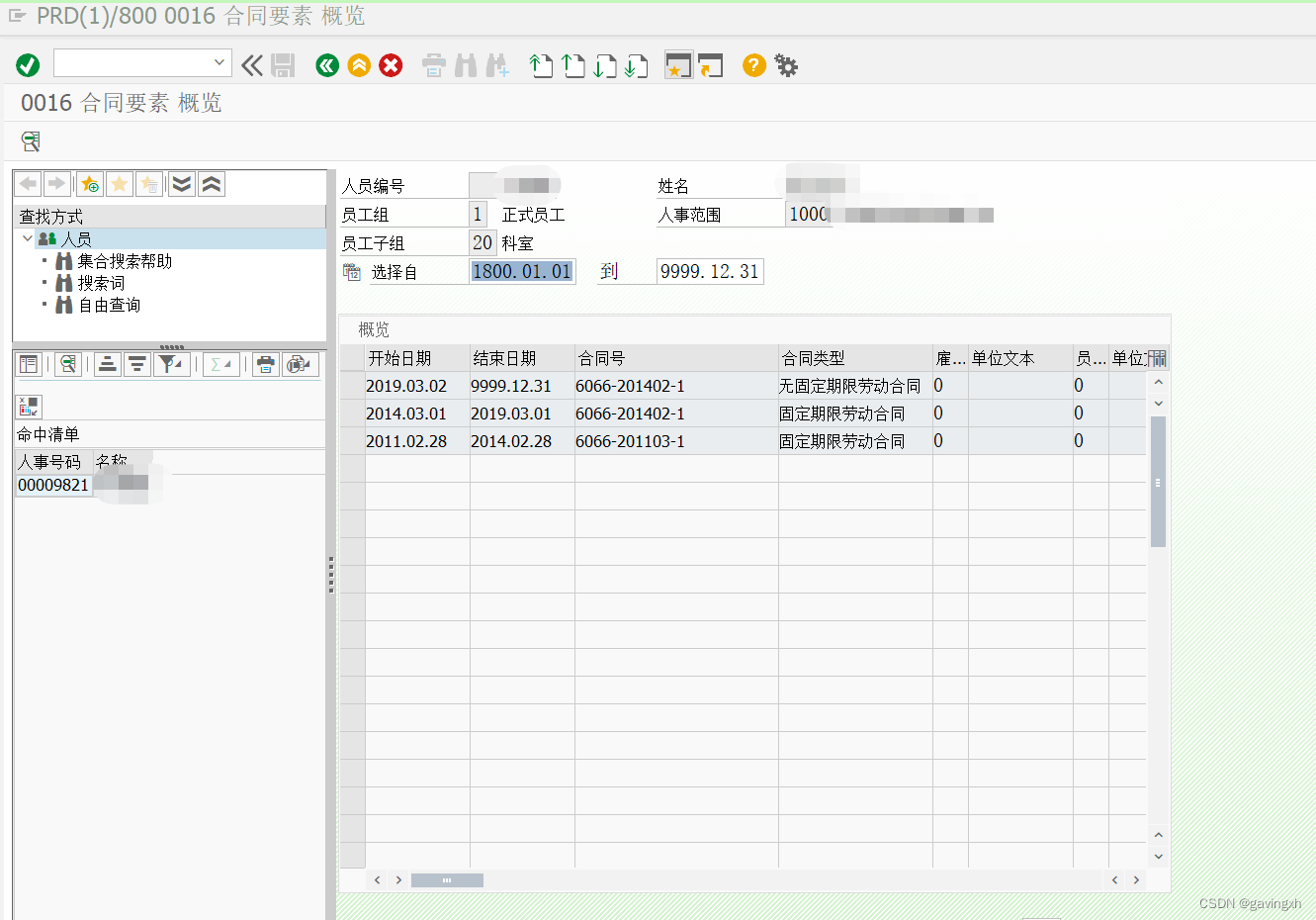
SAP HR 劳动合同信息 0016
New potential energy of industrial integration, Xiamen station of city chain technology digital summit successfully held
Caip2021 preliminary VP
Installing spss25
B_QuRT_User_Guide(37)
B_QuRT_User_Guide(39)
经纬度PLT文件格式说明
2021icpc Shanghai h.life is a game Kruskal reconstruction tree
LDO穩壓芯片-內部框圖及選型參數
windows设置redis开启自动启动
2022 certified surveyors are still at a loss when preparing for the exam? Teach you how to take the exam hand in hand?
Fibonacci number of dynamic programming
USB (XV) 2022-04-14