当前位置:网站首页>Renforcer les dossiers de base de l'apprentissage
Renforcer les dossiers de base de l'apprentissage
2022-07-06 13:52:00 【J'aime le petit blanc fortifié de curry.】
Dans l'apprentissage intensifQ-learningEtSarasComparaison
Multi - agent Enhancement Learning LITTLE WHITE one,J'ai récemment appris à renforcer les bases de l'apprentissage,Notez ici,Au cas où.
Un.、Q-learning
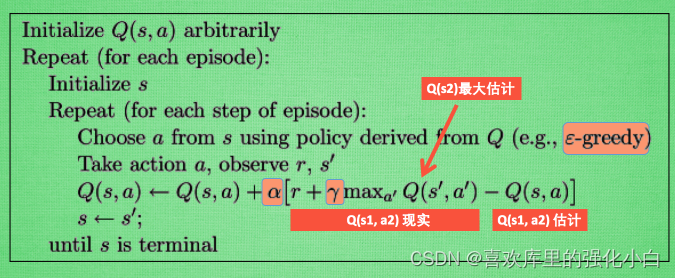
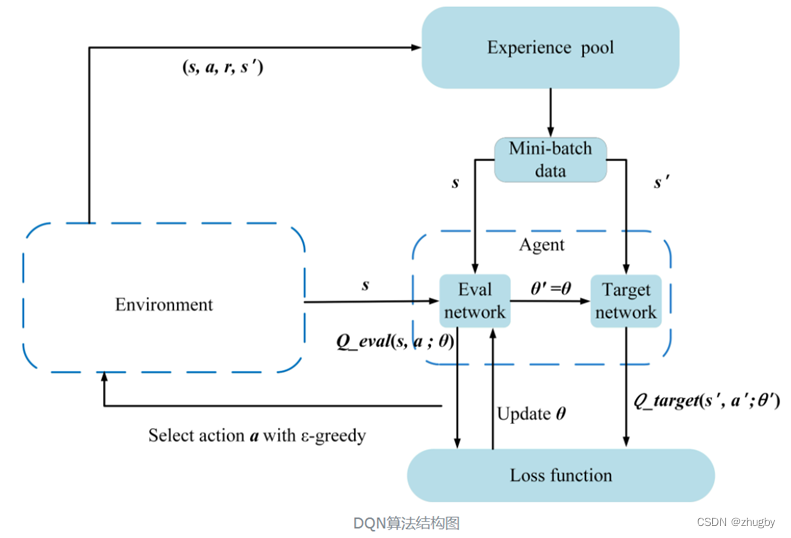
Q-learingL'algorithme d'apprentissage intensif le plus élémentaire,AdoptionQÉtat de stockage du tableau-Valeur de l'action,C'est - à - dire:Q(s,a),Peut être utilisé pour les problèmes avec un espace d'état plus petit,Quand la dimension spatiale de l'état est grande,Besoin de coordination avec le réseau neuronal,S'étend àDQNAlgorithmes,Résolution des problèmes.
- Value-based
- Off-Policy
J'ai beaucoup lu surOn-PolicyEtOff-PolicyBlog de,Je n'ai jamais vraiment compris la différence,C'est un peu confus,J'ai lu la réponse d'un blogueur l'autre jour,Pour avoir une meilleure compréhension,Lien ci - joint.
Liens: on-policyEtoff-policyQuelle est la différence??
QuandQ-learningLors de la mise à jour,Bien que les données utilisées soient actuellespolicyProduit,Mais la politique mise à jour n'est pas celle qui produit ces données(Notez la mise à jour demax),C'est compréhensible ici:Ici.maxL'opération est de sélectionner pour obtenir un plus grandQAction de la valeur,Mise à jourQTableau, Mais il n'est pas certain que le vrai tour prenne des changements ,Alors c'estOff-PolicyDe. - Pseudo - Code
- Réalisation
L'environnement utilisé ici est le jeu de chasse au trésor dans le tutoriel du professeur mofan , Tenue à jour par liste ,—#-T, La dernière position TC'est un trésor.,# Représente la position actuelle du joueur , Allez à l'extrême droite ,Trouver un trésor,Fin du jeu.
L'implémentation du Code fait référence à un blogueur , Aucun lien trouvé .....
import numpy as np
import pandas as pd
import time
N_STATES = 6 # 6Statut,Longueur du tableau unidimensionnel
ACTIONS = [-1, 1] # Deux états,-1:left, 1:right
epsilon = 0.9 # greedy
alpha = 0.1 # Taux d'apprentissage
gamma = 0.9 # Valeur décroissante de la récompense
max_episodes = 10 # Nombre maximum de Tours
fresh_time = 0.3 # Intervalle de déplacement
# q_table
q_table = pd.DataFrame(np.zeros((N_STATES, len(ACTIONS))), columns=ACTIONS)
# choose action: 1. Explorer au hasard et explorer des endroits qui n'ont pas été explorés ,Sinon, sélectionnezrewardLe plus grand mouvement
def choose_action(state, table):
state_actions = table.iloc[state, :]
if np.random.uniform() > epsilon or state_actions.all() == 0:
action = np.random.choice(ACTIONS)
else:
action = state_actions.argmax()
return action
def get_env_feedback(state, action):
#Nouveau statut = État actuel + État du Mouvement
new_state = state + action
reward = 0
# Déplacer à droite plus 0.5
#À droite., Plus près du Trésor ,Obtenir+0.5Récompenses
if action > 0:
reward += 0.5
#À gauche., Loin du Trésor ,Obtenir-0.5Récompenses
if action < 0:
reward -= 0.5
# La prochaine étape vers le Trésor , Donner la plus haute récompense +1
if new_state == N_STATES - 1:
reward += 1
# Si vous marchez à gauche jusqu'à la fin , Encore à gauche , Obtenir une récompense négative minimale -1
#En même temps, Pour définir un nouvel état encore ici ,Sinon, une erreur sera signalée
if new_state < 0:
new_state = 0
reward -= 1
return new_state, reward
def update_env(state, epoch, step):
env_list = ['-'] * (N_STATES - 1) + ['T']
if state == N_STATES - 1:
# Atteindre la destination
print("")
print("epoch=" + str(epoch) + ", step=" + str(step), end='')
time.sleep(2)
else:
env_list[state] = '#'
print('\r' + ''.join(env_list), end='')
time.sleep(fresh_time)
def q_learning():
for epoch in range(max_episodes):
step = 0 # Déplacer les étapes
state = 0 # État initial
update_env(state, epoch, step)
while state != N_STATES - 1:
cur_action = choose_action(state, q_table)
new_state, reward = get_env_feedback(state, cur_action)
q_pred = q_table.loc[state, cur_action]
if new_state != N_STATES - 1:
q_target = reward + gamma * q_table.loc[new_state, :].max()
else:
q_target = reward
q_table.loc[state, cur_action] += alpha * (q_target - q_pred)
state = new_state
update_env(state, epoch, step)
step += 1
return q_table
q_learning()
2.、Saras
Saras C'est aussi l'algorithme le plus fondamental dans l'apprentissage intensif ,Mais aussi avecQStockage des tablesQ(s,a), C'est pour ça que Saras,C'est à cause d'untransitionContient(s,a,r,a,s)Quintuple,C'est - à - dire:Saras.
- Value-based
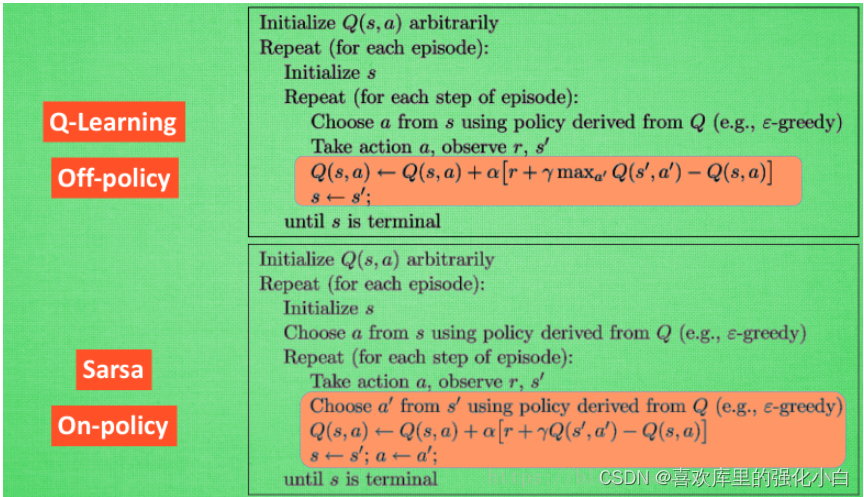
- On-Policy
Comparer iciQ-learning, On saura que , Les données utilisées ici sont actuelles policyProduit,Et mise à jourQQuand ça en vaut la peine., Est basé sur de nouvelles actions et de nouveaux états QValeur, De nouvelles actions seront exécutées ( Notez qu'il n'y a pas de max),Alors c'estOn-Policy. - Pseudo - Code
- Réalisation
Voir iciQ-learning Avec des modifications simples , C'est basé sur le nouvel état , Ré - sélectionner une action , Et pour le faire ,Mise à jourQQuand ça en vaut la peine., Directement basé sur l'état correspondant à l'action QMise à jour de la valeur.
import numpy as np
import pandas as pd
import time
N_STATES = 6 # 6Statut,Longueur du tableau unidimensionnel
ACTIONS = [-1, 1] # Deux états,-1:left, 1:right
epsilon = 0.9 # greedy
alpha = 0.1 # Taux d'apprentissage
gamma = 0.9 # Valeur décroissante de la récompense
max_episodes = 10 # Nombre maximum de Tours
fresh_time = 0.3 # Intervalle de déplacement
# q_table
#Générer(N_STATES,len(ACTIONS)))DeQ Valeur vide Tableau
q_table = pd.DataFrame(np.zeros((N_STATES, len(ACTIONS))), columns=ACTIONS)
# choose action:
#0.9 Probabilité de cupidité ,0.1 Action aléatoire probabiliste , Maintenir une certaine exploration
def choose_action(state, table):
state_actions = table.iloc[state, :]
if np.random.uniform() > epsilon or state_actions.all() == 0:
action = np.random.choice(ACTIONS)
else:
action = state_actions.argmax()
return action
def get_env_feedback(state, action):
#Nouveau statut = État actuel + État du Mouvement
new_state = state + action
reward = 0
# Déplacer à droite plus 0.5
#À droite., Plus près du Trésor ,Obtenir+0.5Récompenses
if action > 0:
reward += 0.5
#À gauche., Loin du Trésor ,Obtenir-0.5Récompenses
if action < 0:
reward -= 0.5
# La prochaine étape vers le Trésor , Donner la plus haute récompense +1
if new_state == N_STATES - 1:
reward += 1
# Si vous marchez à gauche jusqu'à la fin , Encore à gauche , Obtenir une récompense négative minimale -1
#En même temps, Pour définir un nouvel état encore ici ,Sinon, une erreur sera signalée
if new_state < 0:
new_state = 0
reward -= 1
return new_state, reward
# Maintenir l'environnement
def update_env(state, epoch, step):
env_list = ['-'] * (N_STATES - 1) + ['T']
if state == N_STATES - 1:
# Atteindre la destination
print("")
print("epoch=" + str(epoch) + ", step=" + str(step), end='')
time.sleep(2)
else:
env_list[state] = '#'
print('\r' + ''.join(env_list), end='')
time.sleep(fresh_time)
#Mise à jourQTableau
def Saras():
for epoch in range(max_episodes):
step = 0 # Déplacer les étapes
state = 0 # État initial
update_env(state, epoch, step)
cur_action = choose_action(state, q_table)
while state != N_STATES - 1:
new_state, reward = get_env_feedback(state, cur_action)
new_action = choose_action(new_state,q_table)
q_pred = q_table.loc[state, cur_action]
if new_state != N_STATES - 1:
q_target = reward + gamma * q_table.loc[new_state, new_action]
else:
q_target = reward
q_table.loc[state, cur_action] += alpha * (q_target - q_pred)
state,cur_action = new_state,new_action
update_env(state, epoch, step)
step += 1
return q_table
Saras()
Bloguer pour la première fois, Peut comprendre qu'il y a un problème , J'espère corriger l'erreur .
边栏推荐
- Canvas foundation 1 - draw a straight line (easy to understand)
- 1. First knowledge of C language (1)
- 5月27日杂谈
- 受检异常和非受检异常的区别和理解
- [the Nine Yang Manual] 2021 Fudan University Applied Statistics real problem + analysis
- ArrayList的自动扩容机制实现原理
- TypeScript快速入门
- MySQL事务及实现原理全面总结,再也不用担心面试
- 7-15 h0161. 求最大公约数和最小公倍数(PTA程序设计)
- Redis实现分布式锁原理详解
猜你喜欢
Principles, advantages and disadvantages of two persistence mechanisms RDB and AOF of redis
1. C language matrix addition and subtraction method
3. Input and output functions (printf, scanf, getchar and putchar)
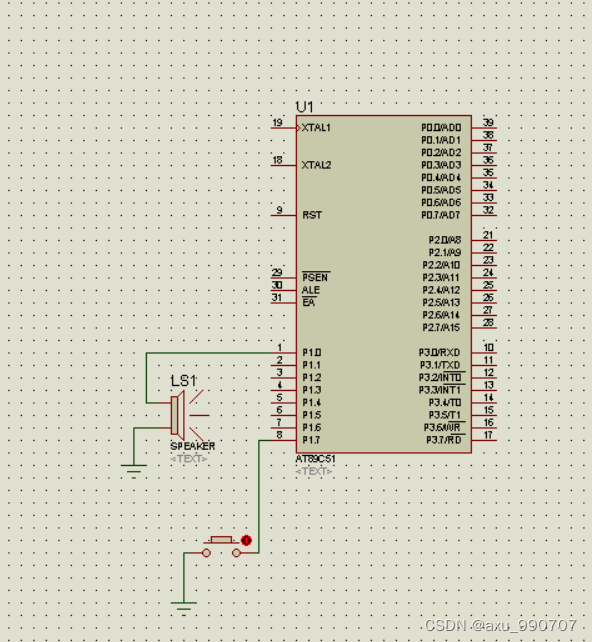
一段用蜂鸣器编的音乐(成都)
7. Relationship between array, pointer and array
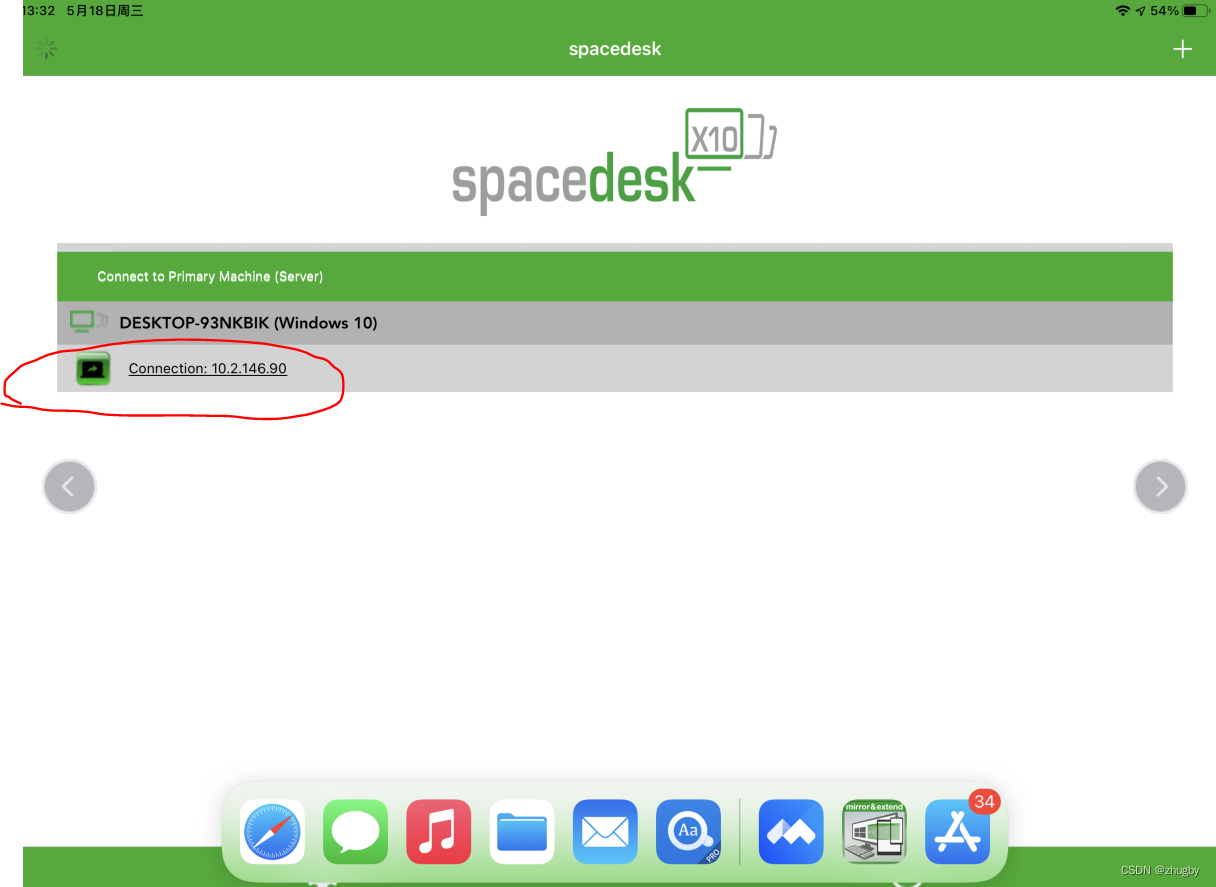
Using spacedesk to realize any device in the LAN as a computer expansion screen
Canvas foundation 1 - draw a straight line (easy to understand)
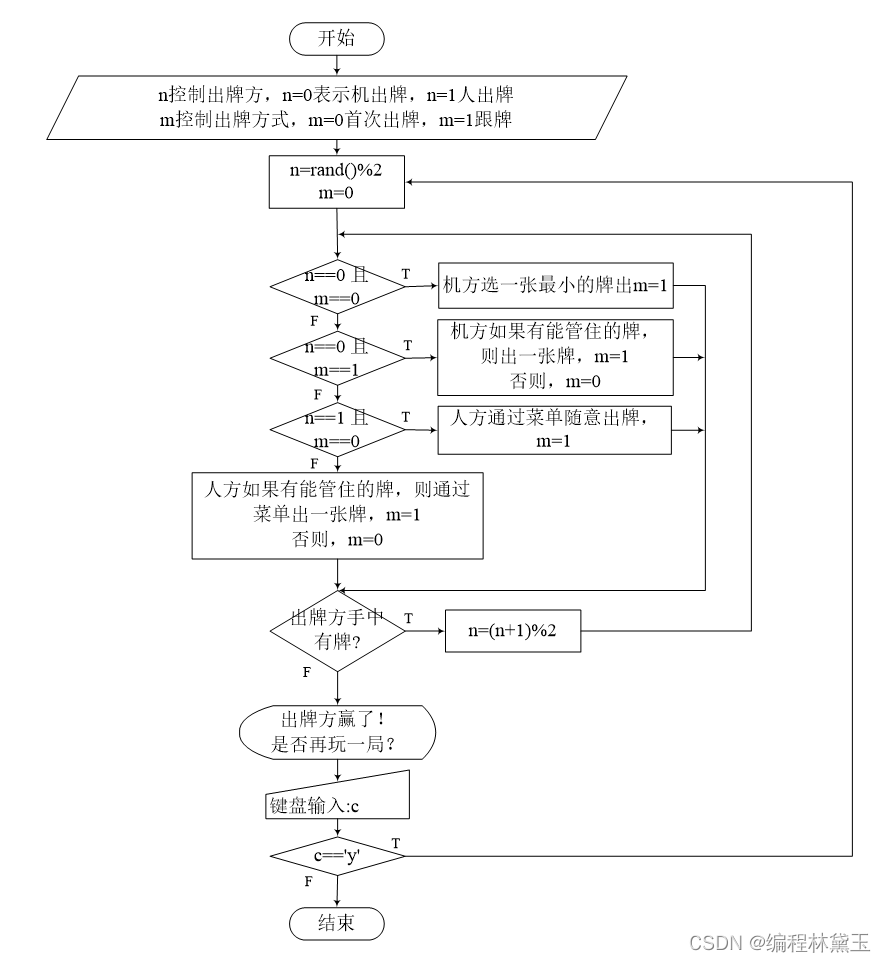
撲克牌遊戲程序——人機對抗
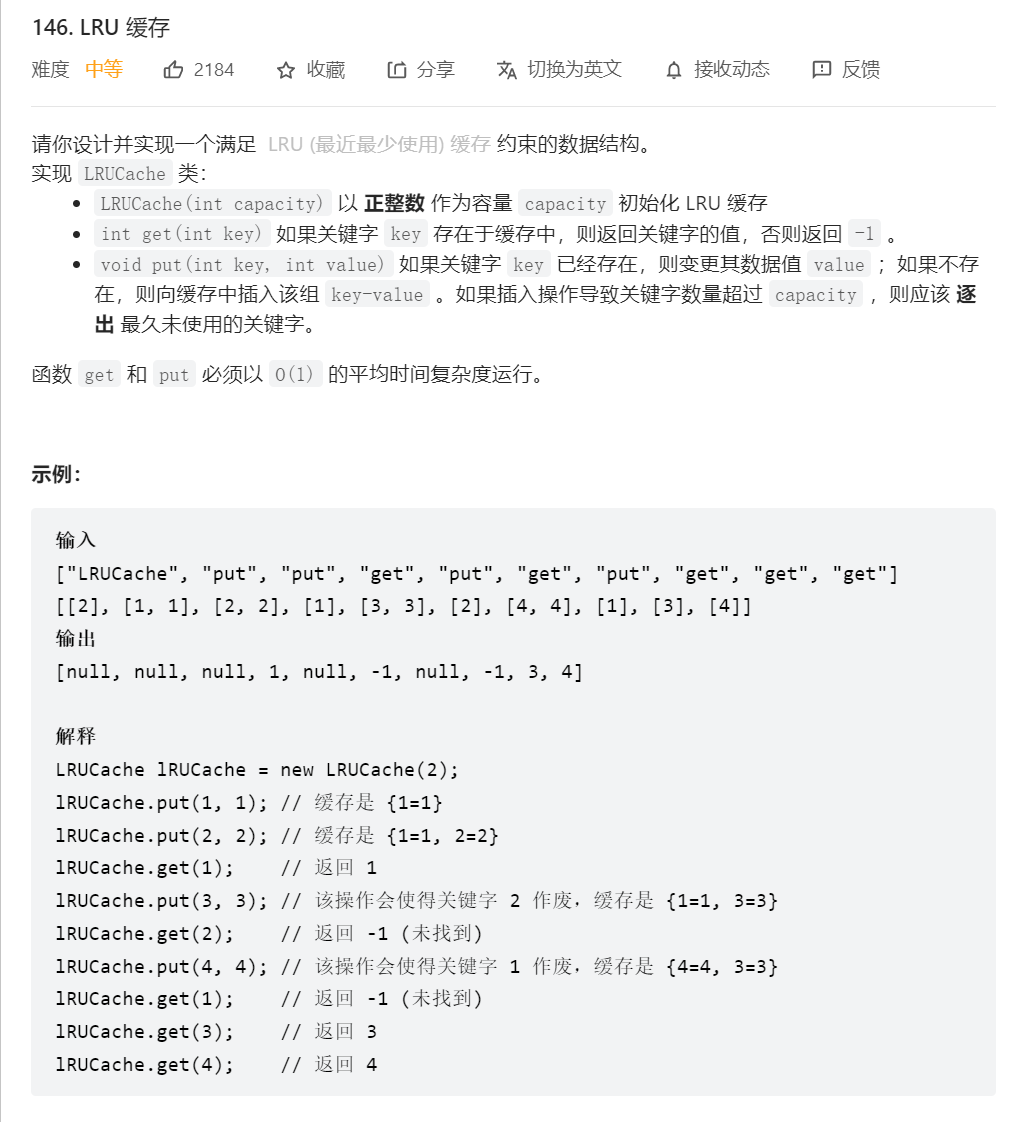
Thoroughly understand LRU algorithm - explain 146 questions in detail and eliminate LRU cache in redis
深度强化文献阅读系列(一):Courier routing and assignment for food delivery service using reinforcement learning
随机推荐
强化学习系列(一):基本原理和概念
SRC mining ideas and methods
Implementation principle of automatic capacity expansion mechanism of ArrayList
稻 城 亚 丁
【educoder数据库实验 索引】
ArrayList的自动扩容机制实现原理
MATLAB打开.m文件乱码解决办法
实验五 类和对象
优先队列PriorityQueue (大根堆/小根堆/TopK问题)
FAQs and answers to the imitation Niuke technology blog project (I)
Miscellaneous talk on May 27
ABA问题遇到过吗,详细说以下,如何避免ABA问题
C language to achieve mine sweeping game (full version)
实验七 常用类的使用(修正帖)
Redis实现分布式锁原理详解
Brief introduction to XHR - basic use of XHR
受检异常和非受检异常的区别和理解
5月27日杂谈
Difference and understanding between detected and non detected anomalies
FAQs and answers to the imitation Niuke technology blog project (II)